可调刚度电磁作动器试验平台
本发明涉及一种试验台,特别是一种对可调刚度电磁作动器的静态特性、动态特性及漏磁进行自动化测试的设备。
背景技术:
1、可调刚度电磁作动器,作为一种振动主动控制的元件,即具有较低动态刚度,同时又不会削弱原有静态支撑能力,在振动主动控制领域具有重要的应用前景。
2、可调刚度电磁作动器的静态特性及动态特性对于其隔振性能有很大的影响,而目前关于电磁作动器的性能测试装置较少,且多采用手动调节电磁作动器输出轴位移的形式对其静态特性进行测试,得到的试验数据量少,效率低,且手动调节定位不准确。
3、同时,现有的可调刚度电磁作动器试验平台在试验中通常为测量电磁作动器的静态特性和动态特性分别设计一套试验系统,在一定程度上对试验资源造成了浪费。
4、另外,现有的可调刚度电磁作动器试验平台通常只针对单一试验对象设计,无拓展性,对于不同尺寸的作动器无法进行对比试验。
5、现有的可调刚度电磁作动器试验平台不具备测量电磁作动器漏磁情况,电磁作动器是由磁场驱动从而产生电磁力,故作动器在工作时会产生一定程度的磁场泄漏,泄漏的磁场会对周围的仪器造成影响,因此在某些特定情况下对作动器的漏磁情况有一定要求。
6、
技术实现思路
1、鉴于现有技术的上述不足,本发明的目的在于提供一种可调刚度电磁作动器试验平台,该可调刚度电磁作动器试验平台设计合理,有利于同时对可调刚度电磁作动器的静态特性、动态特性及漏磁进行测试。
2、为实现上述目的,本发明采用如下技术方案:
3、本发明电磁作动器试验平台,其特征在于:
4、包括底座支撑机构、力作用机构、测量机构和控制系统;
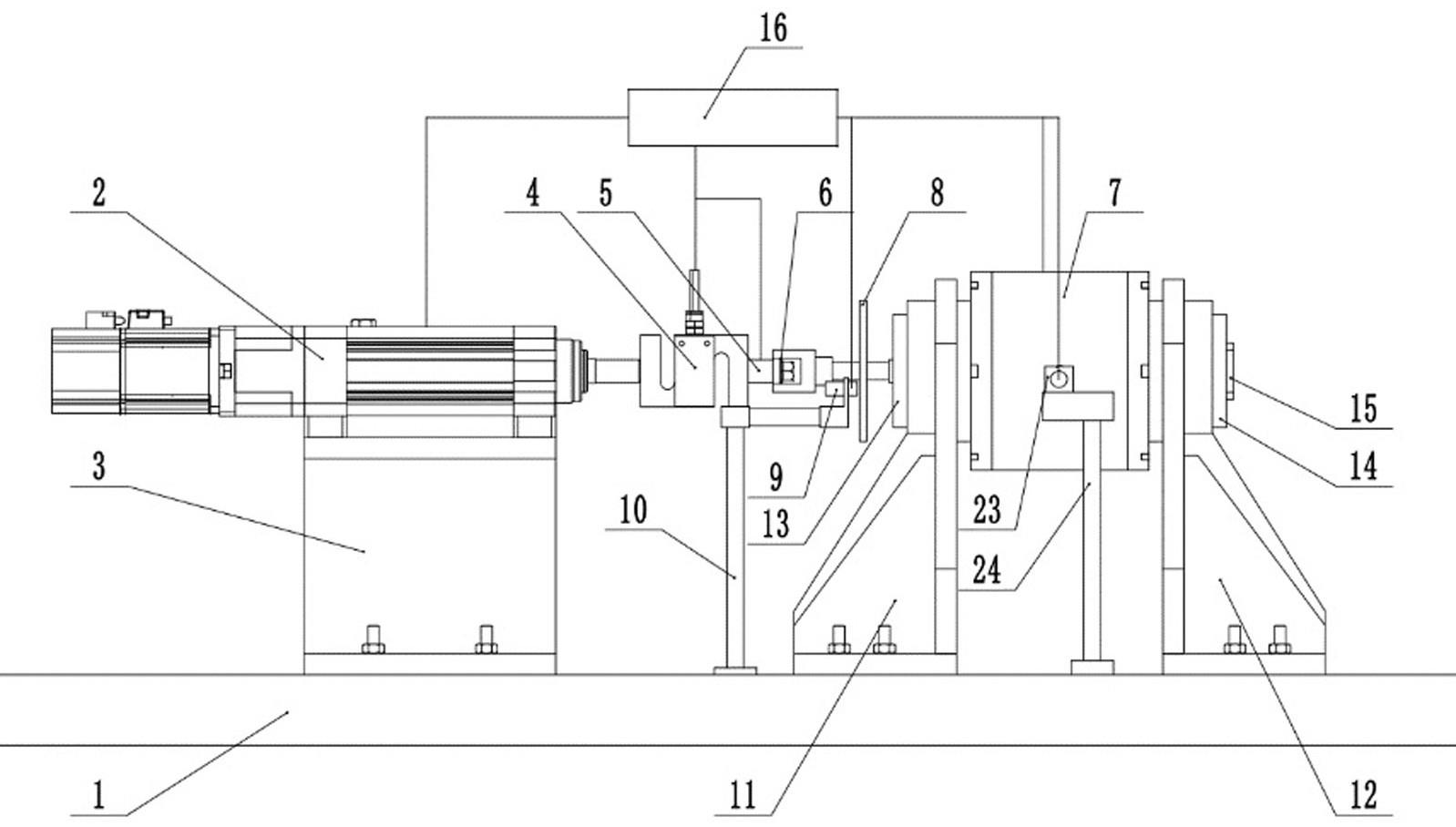
5、所述底座支撑机构包括铸铁平台、安装在铸铁平台上的电磁作动器左支座、电磁作动器右支座、设置在电磁作动器支座两侧的电磁作动器左端盖、电磁作动器右端盖,安装在电磁作动器右端盖的调零端盖;
6、所述力作用机构包括安装在铸铁平台上的电缸支座和安装在电缸支座上的伺服电动缸;
7、所述测量机构包括作为试验主体的电磁作动器、安装在电磁作动器输出轴上的电涡流位移传感器作用平台、安装在铸铁平台上的电涡流位移传感器支架、电涡流位移传感器支架上安装的电涡流位移传感器、与伺服电动缸连接的静态力传感器、动态力传感器,静态力传感器一端通过双头螺栓与伺服电动缸连接,静态力传感器另一端通过双头螺栓与动态力传感器连接;
8、测量机构还包括一连接器,连接器一端通过螺纹连接安装在电磁作动器输出轴自由端,连接器另一端与动态力传感器通过双头螺栓连接,另外包含测量漏磁的霍尔探头及霍尔探头支架;
9、控制系统包括上位机、电源模块、功率放大器、伺服控制器、数据采集卡和变送器;接收电涡流的位移传感器、动态力传感器、静态力传感器的信号经变送器,传输给数据采集卡,再由数据采集卡传输给上位机,经上位机编译为位移与力;所述上位机向伺服控制器发送指令,并传达给伺服电动缸,控制伺服电动缸的运动;电源模块由上位机调整输出电流,并通过功率放大器放大电流,控制电磁作动器的电流输入。
10、进一步的,上述电磁作动器包括主轴,法兰,壳体,衔铁,线圈,圆螺母和直线轴承;所述电磁作动器主轴作为电磁作动器的输出轴,其中两个法兰分别作为电磁作动器左端盖、电磁作动器右端盖通过螺栓与壳体连接,圆螺母与主轴凸台使主轴固定在衔铁上。
11、进一步的,上述控制系统控制伺服电动缸实现0~100hz的直线往复运动,并精确控制电磁作动器输出轴运动的速度及停止位置,伺服电动缸与电磁作动器输出轴之间安装有动态力传感器、静态力传感器,力传感器信号经变送器传输给上位机显示并记录输出力大小,同时电磁作动器输出轴上安装有一电涡流位移传感器作用平台,跟随电磁作动器输出轴作轴向运动,通过电涡流位移传感器来测量电磁作动器输出轴的位移,并将位移信号经变送器传输给上位机显示并记录位移大小。
12、进一步的,上述伺服电动缸带动电磁作动器输出轴以缓慢的速度运行,上位机通过数据采集卡,采集经变送器传输的静态力传感器信号及电涡流位移传感器信号,显示并记录电磁作动器的电磁力与位移,绘制电磁作动器的静态电磁力与位移曲线,从而得到电磁作动器的静态特性。
13、进一步的,上述伺服电动缸带动电磁作动器输出轴以较高频率进行轴向往复运动,上位机通过数据采集卡,采集经变送器传输的动态力传感器信号及电涡流位移传感器信号,显示并记录电磁作动器的电磁力与位移,绘制电磁作动器的动态电磁力与位移曲线,从而获得电磁作动器的动态特性。
14、进一步的,上述霍尔探头对电磁作动器的漏磁进行测量,通过数据采集卡传输给上位机;上位机与电源模块之间存在通讯,控制电源模块输入给电磁作动器的电流大小,从而驱动作动器产生不同大小的电磁力,通过改变电流大小,获得不同电流下,电磁作动器的静态特性与动态特性。
15、进一步的,上述试验平台采用带有t型槽的铸铁平台作为整个试验台架的底座,电磁作动器左、右支座根据电磁作动器的大小,适应性的调整两个电磁作动器左、右支座之间的间距,电磁作动器左、右支座与电磁作动器之间通过孔轴配合装配,电磁作动器左右端盖用来锁紧电磁作动器,限制其轴向及径向运动,将电磁作动器输出轴右移至与调零端盖接触,将此时电磁作动器输出轴所处位置记为零点。
16、本发明电磁作动器试验平台中电磁作动器主轴调零步骤:
17、本发明的试验平台电磁作动器在实现电磁作动器主轴位置调零十分关键,应在进行其它试验前先行完成该操作,其工作过程包括以下步骤:
18、步骤a1,开启上位机,静态力传感器检测电磁作动器输出端的轴向受力,力信号传递至上位机,此时电磁作动器不通入电流,通过上位机显示力的数值应为零;
19、步骤a2,在上位机程度中调整电动缸的输出位移至最小,此时电磁作动器主轴位于靠近伺服电动缸的最左端;将调零端盖安装在电磁作动器右端盖上,并缓慢增加伺服电动缸的输出位移;
20、步骤a3,测量电磁作动器的输出力,当输出力发生变化时,停止伺服电动缸的位移,记录此时电涡流位移传感器检测到的位移值,将此位移值作为零点位置并记录,为后续试验提供电磁作动器主轴零点位置信息;
21、步骤a4,取下调零盖板。
22、本发明电磁作动器试验平台中静态力测量方法,
23、当试验平台用于测量电磁作动器的静态特性时,其工作过程包括以下步骤:
24、步骤b1,开启上位机,进行电磁作动器主轴调零工作,记录零点位置;
25、步骤b2,开启电源模块及功率放大器,在上位机程序中调整电源模块输出电流,从而控制通入电磁作动器线圈的电流大小;
26、步骤b3,霍尔探头测量磁致伸缩作动器的磁场强度变化,将磁场强度信息传递给特斯拉计,特斯拉计将处理后的信号发送至数据采集卡,最终传递至所述上位机进行记录;
27、步骤b4,静态力传感器检测电磁作动器轴向受力,力信号通过变送器和数据采集卡传输给上位机;电涡流位移传感器检测电磁作动器轴向位移,位移信号通过变送器和数据采集卡传输给上位机;通过上位机程序调整伺服电动缸输出位移,使得电磁作动器主轴在零点位置-1.5mm到1.5mm之间缓慢移动,实时记录电磁作动器主轴输出力与位移,并绘制其静态力与位移特性曲线;
28、步骤b5,测量不同电流下,电磁作动器主轴在零点位置-1.5mm到1.5mm内静态力与位移特性曲线。
29、本发明电磁作动器试验平台中动态力测量方法,
30、当试验平台用于测量电磁作动器的动态特性时,其工作过程包括以下步骤:
31、步骤c1,开启上位机,进行电磁作动器主轴调零工作,记录零点位置;
32、步骤c2,开启电源模块及功率放大器,在上位机程序中调整电源模块输出电流,从而控制通入电磁作动器线圈的电流大小;
33、步骤c3, 霍尔探头测量磁致伸缩作动器的磁场强度变化,将磁场强度信息传递给特斯拉计,特斯拉计将处理后的信号发送至数据采集卡,最终传递至所述上位机进行记录;
34、步骤c4,动态力传感器检测电磁作动器轴向所受动态力,力信号通过变送器和数据采集卡传输给上位机;电涡流位移传感器检测电磁作动器轴向位移,位移信号通过变送器和数据采集卡传输给上位机;通过上位机程序调整伺服电动缸输出位移,使得电磁作动器主轴在零点位置-1.5mm到1.5mm之间往返运动,实时记录电磁作动器主轴输出力与位移,并绘制其动态力与位移特性曲线;
35、步骤c5,测量电磁作动器动态力与位移特性曲线时,在上位机程序中输入不同的电动缸移动速度及不同电流,记录不同电流不同速度下电磁作动器动态力与位移特性曲线。
36、本发明试验平台底座支撑机构采用带有t型槽的铸铁平台,以及可调节的电磁作动器支座,力作用机构采用伺服电动缸作为位移输出源,并采用连接器连接电磁作动器与电动缸具有以下优点:
37、1.采用带有t型槽的铸铁平台,以及非固定的电磁作动器支座,可以提高试验平台的适应性,方便对不同尺寸的电磁作动器进行试验;
38、2.采用连接器连接电磁作动器与电动缸,可以一定程度上减弱电磁作动器与电动缸之间同轴度要求;
39、3.上位机可以主动控制伺服电动缸的输出位移与速度,记录各个传感器的数据,通过编程可以实现自动化试验,解决了测试过程手动加载过于繁琐的问题,一定程度上提高试验效率;同时伺服电动缸可以实现0~100hz的直线往复运动,从而可以既可以进行电磁作动器的静态特性试验,又能实现电磁作动器的动态特性试验;
40、本发明将电涡流位移传感器布置在独立的电涡流位移传感器支架上,避免了测量时电磁作动器产生的力使得铸铁平台产生变形,导致布置在台架上的位移传感器测量不准确的问题,同时能避免测量时铸铁平台共振导致的测量结果不准确的问题;
41、本发明试验平台中布置霍尔探头,用于检测在不同工作状态中电磁作动器的漏磁情况,霍尔探头将收集到的磁场信号传递给特斯拉计进行处理,最后使用上位机进行记录,通过测量电磁作动器周围的磁场情况,保护周围精密仪器不被电磁作动器所产生的漏磁造成损害。
42、
- 还没有人留言评论。精彩留言会获得点赞!