一种3D微波近场成像方法、装置、系统及其介质与流程
本发明属于微波成像,涉及一种3d微波近场成像方法、装置、系统及其介质。
背景技术:
1、微波成像技术以微波在各种复杂媒质中的传播和散射的研究为基础,通过测量被测媒质外部的散射场数据,重建被测媒质内部的复介电常数图像。被测的散射场携带大量有关散射体的信息,利用关于散射目标的先验知识,经过适当的数学处理之后可以提取出散射体本身所具有的某些特性,如散射体的形状,介电常数的分布等。由于微波成像能实现对目标的无损检测,能同时对目标进行几何成像和物理成像。
2、参考附图6,现有微波成像采用的天线阵列结构的天线阵依次相连接,相邻的两个天线阵之间并不存在任何间距,那么在天线阵列结构大小一定的条件下,布局的天线阵会更多,相应的,使用的收发天线也会更多,此种类型的天线阵列在生成成像时,一般会采用反投影算法或波数域方法生成成像,虽然采用反投影算法虽然生成图片的质量高,但是计算速度不够快,波数域方法生成成像生成图片的计算速度虽然高,但是近场成像的分辨率与成像距离有关,在近场0.6m处采用波数域算法生成的成像分辨率完全不够,导致生成的成像无法进行使用。
技术实现思路
1、本发明的目的在于针对现有技术的不足,提供一种3d微波近场成像方法、装置、系统及其介质,在减少使用收发天线的条件下,保证生成图像分辨率及清晰度不会发生降低。
2、为了实现上述目的,本发明采用了以下技术方案:
3、本发明第一方面在于提供一种3d近场微波成像方法,包括下述步骤:
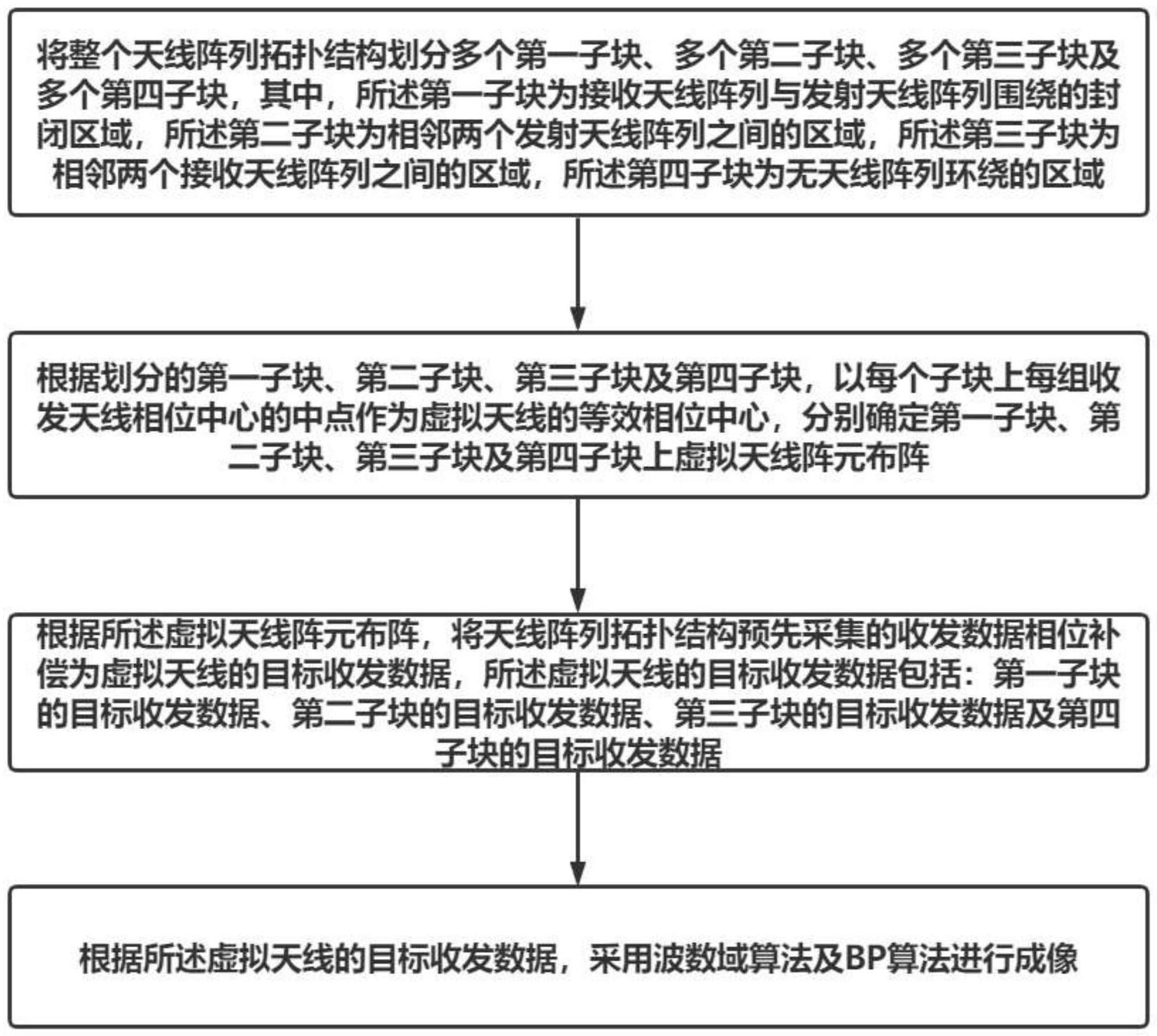
4、将整个天线阵列拓扑结构划分多个第一子块、多个第二子块、多个第三子块及多个第四子块,其中,所述第一子块为接收天线阵列与发射天线阵列围绕的封闭区域,所述第二子块为相邻两个发射天线阵列之间的区域,所述第三子块为相邻两个接收天线阵列之间的区域,所述第四子块为无天线阵列环绕的区域;
5、根据划分的第一子块、第二子块、第三子块及第四子块,以每个子块上每组收发天线相位中心的中点作为虚拟天线的等效相位中心,分别确定第一子块、第二子块、第三子块及第四子块上虚拟天线阵元布阵;
6、根据所述虚拟天线阵元布阵,将天线阵列拓扑结构预先采集的收发数据相位补偿为虚拟天线的目标收发数据,所述虚拟天线的目标收发数据包括:第一子块的目标收发数据、第二子块的目标收发数据、第三子块的目标收发数据及第四子块的目标收发数据;
7、根据所述虚拟天线的目标收发数据,采用波数域算法及bp算法进行成像。
8、进一步的,所述根据所述虚拟天线阵元布阵,将天线阵列拓扑结构预先采集的收发数据相位补偿为虚拟天线的目标收发数据,所述虚拟天线的目标收发数据包括:第一子块的目标收发数据、第二子块的目标收发数据、第三子块的目标收发数据及第四子块的目标收发数据,包括:
9、计算每个子块的中心坐标及虚拟天线的坐标其中,为子块n的中心坐标,z0=0为天线阵的距离向的坐标,为发射天线的坐标,为接收天线的坐标;
10、根据每个子块的中心坐标及虚拟天线的坐标,分别计算收发天线与到该子块的成像区域中心的第一距离及虚拟天线到子块成像区域中心的第二距离;
11、根据所述第一距离及所述第二距离,计算所述第一距离与所述第二距离之间的差值δr,其中,
12、根据所述第一距离与所述第二距离之间的差值δr,确定虚拟天线的目标收发数据virtualecho(nt,nr,rz),其中,
13、virtualecho(nt,nr,rz)=echo(nt,nr,rz)*exp(2jkδr)。
14、进一步的,所述根据所述虚拟天线的目标收发数据,采用波数域算法及bp算法进行成像为:将所述第一子块的目标收发数据、第二子块的目标收发数据及第三子块的目标收发数据均采用波数域算法进行成像,将所述第四子块的目标收发数据采用bp算法进行成像。
15、本发明第二方面在于提供一种3d近场微波成像装置,所述3d近场微波成像装置包括:
16、划分模块,所述划分模块用于将整个天线阵列拓扑结构划分多个第一子块、多个第二子块、多个第三子块及多个第四子块,其中,所述第一子块为接收天线阵列与发射天线阵列围绕的封闭区域,所述第二子块为相邻两个发射天线阵列之间的区域,所述第三子块为相邻两个接收天线阵列之间的区域,所述第四子块为无天线阵列环绕的区域;
17、确定模块,所述确定模块根据划分的第一子块、第二子块、第三子块及第四子块,以每个子块上每组收发天线相位中心的中点作为虚拟天线的等效相位中心,分别确定第一子块、第二子块、第三子块及第四子块上虚拟天线阵元布阵;
18、转换模块,所述转换模块用于根据所述虚拟天线阵元布阵,将天线阵列拓扑结构预先采集的收发数据相位补偿为虚拟天线的目标收发数据,所述虚拟天线的目标收发数据包括:第一子块的目标收发数据、第二子块的目标收发数据、第三子块的目标收发数据及第四子块的目标收发数据;
19、图像生成模块,所述图像生成模块用于根据所述虚拟天线的目标收发数据,采用波数域算法及bp算法进行成像。
20、进一步的,所述转换模块包括:
21、第一子计算模块,所述第一子计算模块用于计算每个子块的中心坐标及虚拟天线的坐标其中,为子块n的中心,z0=0为天线阵的距离向的坐标,为发射天线的坐标,为接收天线的坐标;
22、第二子计算模块,所述第二子计算模块用于根据每个子块的中心坐标及虚拟天线的坐标,分别计算收发天线与到该子块的成像区域中心的第一距离及虚拟天线到子块成像区域中心的第二距离;
23、第三子计算模块,所述第三子计算模块用于根据所述第一距离及所述第二距离,计算所述第一距离与所述第二距离之间的差值δr,其中,
24、需要说明的是,为发射天线到成像区域中心距离,为接收天线到成像中心距离,为虚拟天线到成像中心距离;
25、确定模块,所述确定模块用于根据所述第一距离与所述第二距离之间的差值δr,确定虚拟天线的目标收发数据virtualecho(nt,nr,rz),其中,virtualecho(nt,nr,rz)=echo(nt,nr,rz)*exp(2jkδr);
26、需要说明的是,nt表示发射阵元的序号,nr表示接收阵元的序号,rz表示成像平面到天线平面的距离,echo(nt,nr,rz)表示nt个发射天线,nr个接收天线的回波,exp(2jkδr)为echo(nt,nr,rz)的指数用于相位补偿,j为复数符号,k为空间谱,且k=2*pi*f/c,f表示发射信号频率,c表示光速。
27、本发明第三方面在于提供一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现所述3d近场微波成像方法的步骤。
28、本发明第四方面在于提供一种存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现所述3d近场微波成像方法的步骤。
29、本发明的有益效果:
30、通过将整个天线阵列拓扑结构划分多个第一子块、多个第二子块、多个第三子块及多个第四子块,其中,所述第一子块为接收天线阵列与发射天线阵列围绕的封闭区域,所述第二子块为相邻两个发射天线阵列之间的区域,所述第三子块为相邻两个接收天线阵列之间的区域,所述第四子块为无天线阵列环绕的区域;根据划分的第一子块、第二子块、第三子块及第四子块,以每个子块上每组收发天线相位中心的中点作为虚拟天线的等效相位中心,分别确定第一子块、第二子块、第三子块及第四子块上虚拟天线阵元布阵;根据所述虚拟天线阵元布阵,将天线阵列拓扑结构预先采集的收发数据相位补偿为虚拟天线的目标收发数据,所述虚拟天线的目标收发数据包括:第一子块的目标收发数据、第二子块的目标收发数据、第三子块的目标收发数据及第四子块的目标收发数据;根据所述虚拟天线的目标收发数据,采用波数域算法及bp算法进行成像;使得虚拟阵面恰好能够满足成像要求,没有产生冗余虚拟阵,因此能够在减少使用收发天线的条件下保证成像的分辨率和清晰度不会降低。。
- 还没有人留言评论。精彩留言会获得点赞!