一种双基地MIMO和FDA-MIMO双模式雷达协同目标定位方法
本发明属于雷达信号处理,具体涉及一种双基地mimo和fda-mimo双模式雷达协同目标定位方法。
背景技术:
1、mimo(multiple-input multiple-output,多输入多输出)雷达通过多个发射天线同步发射正交波形,并在接收端使用匹配滤波对回波进行处理分离出各发射端信号,相比于传统相控阵雷达,mimo雷达可以通过改变阵列结构和发射波形来提高自由度。fda(frequency diverse array,频率分集)雷达在阵元间施加一个微小的频偏,在发射端获得距离角度二维依赖的波束方向图,可以灵活识别多维域的目标信号或者干扰。将fda与mimo雷达体制相结合的fda-mimo可兼具fda雷达与mimo雷达的特性,实现fda雷达发射端自由度可控进而实现对目标距离角度的同时估计。
2、单基地fda-mimo雷达体制下利用dod(direction of departure,发射角度)和doa(direction of arrival,接收角度)解决目标定位中距离角度耦合的问题,在双基地fda-mimo雷达体制下,目标信号的发射角度与目标信号接收角度不相同,因此无法直接通过接收导向矢量解决fda-mimo雷达参数估计中的距离角度耦合问题,导致双基地场景下发射导向矢量中距离和角度解耦更加复杂。
3、因此,如何实现双基地fda-mimo体制下的发射导向矢量距离角度解耦是解决双基地fda-mimo雷达体制下目标定位问题的关键。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种双基地mimo和fda-mimo双模式雷达协同目标定位方法。本发明要解决的技术问题通过以下技术方案实现:
2、本发明提供一种双基地mimo和fda-mimo双模式雷达协同目标定位方法,包括:
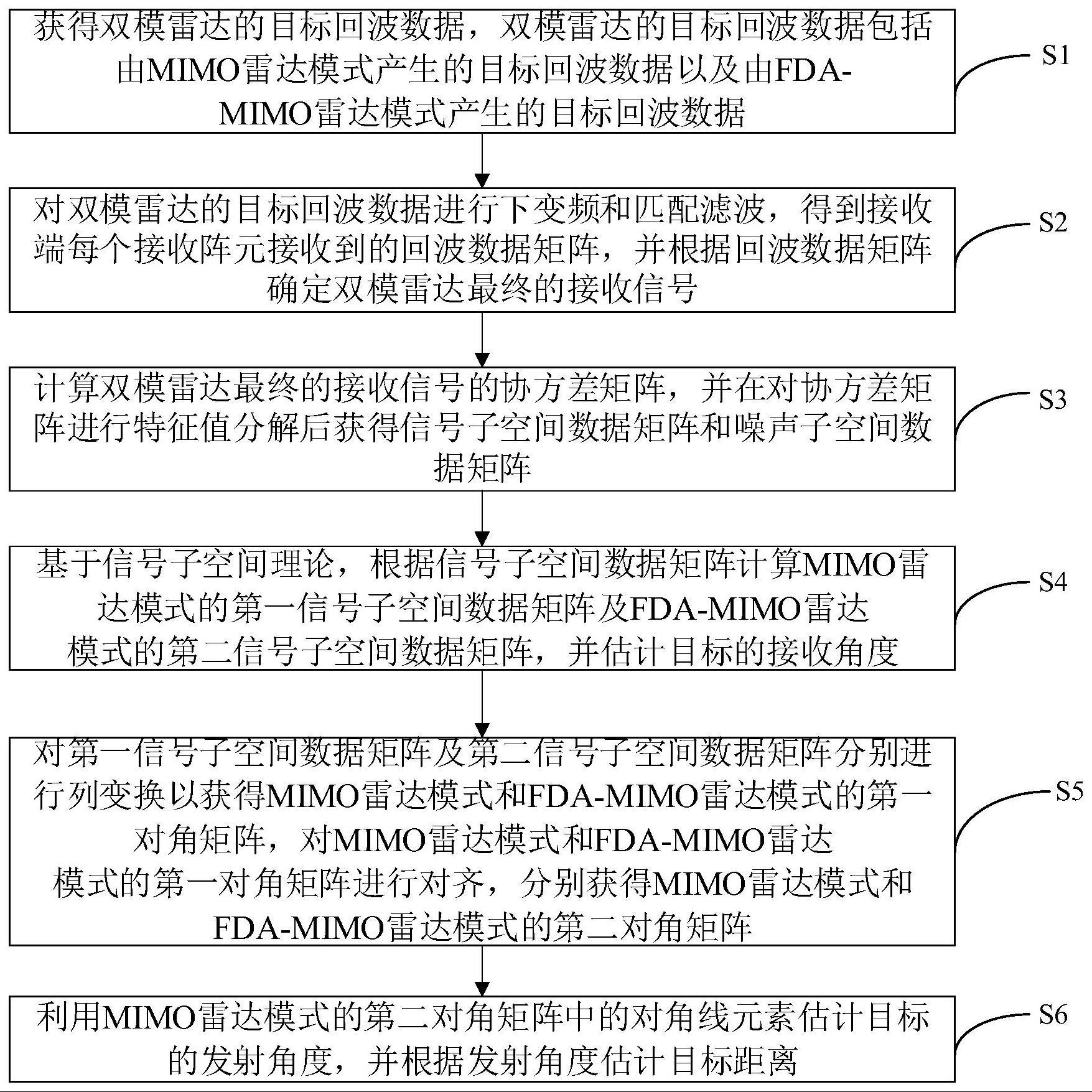
3、获得双模雷达的目标回波数据,所述双模雷达的目标回波数据包括由mimo雷达模式产生的目标回波数据以及由fda-mimo雷达模式产生的目标回波数据;
4、对所述双模雷达的目标回波数据进行下变频和匹配滤波,得到接收端每个接收阵元接收到的回波数据矩阵,并根据所述回波数据矩阵确定双模雷达最终的接收信号;
5、计算所述双模雷达最终的接收信号的协方差矩阵,并在对所述协方差矩阵进行特征值分解后获得信号子空间数据矩阵和噪声子空间数据矩阵;
6、基于信号子空间理论,根据信号子空间数据矩阵计算mimo雷达模式的第一信号子空间数据矩阵及fda-mimo雷达模式的第二信号子空间数据矩阵,并估计目标的接收角度;
7、对所述第一信号子空间数据矩阵及所述第二信号子空间数据矩阵分别进行列变换以获得mimo雷达模式和fda-mimo雷达模式的第一对角矩阵,对所述mimo雷达模式和fda-mimo雷达模式的第一对角矩阵进行对齐,分别获得mimo雷达模式和fda-mimo雷达模式的第二对角矩阵;
8、利用mimo雷达模式的第二对角矩阵中的对角线元素估计目标的发射角度,并根据所述发射角度估计目标距离。
9、在本发明的一个实施例中,mimo雷达模式的发射信号为:
10、
11、fda-mimo雷达模式的发射信号为:
12、
13、式中,rect(·)表示脉冲函数,tp表示脉冲宽度,m1表示mimo雷达模式的发射阵元数,m2表示fda-mimo雷达模式的发射阵元数,φ1,m'(t)表示mimo雷达模式发射阵元m'在t时刻的发射基准信号,φ2,m(t)表示fda-mimo雷达模式发射阵元m在t时刻的发射基准信号,f0表示信号载频,fm表示fda-mimo雷达模式发射阵元m发射信号的频率。
14、在本发明的一个实施例中,所述双模雷达最终的接收信号为:
15、x(t)=as(t)+n(t);
16、其中,
17、
18、
19、式中,a表示导向矢量矩阵,a1、a2分别表示mimo雷达模式和fda-mimo雷达模式的导向矢量矩阵,n(t)表示高斯白噪声,s(t)表示双模雷达的发射信号,fd,l表示mimo雷达模式目标l的多普勒频移,λ0表示发射信号波长,rl表示第l个目标的传播距离,表示第l个目标的发射角度,θl表示第l个目标的接收角度,d表示发射阵元和接收阵元的间距,τ′0,l表示信号到第l个目标的传播时延,c表示真空中的光速,表示克罗内克积,l=1,2,3...,l,l表示目标数量。
20、在本发明的一个实施例中,计算所述双模雷达最终的接收信号的协方差矩阵,并在对所述协方差矩阵进行特征值分解后获得信号子空间数据矩阵和噪声子空间数据矩阵的步骤,包括:
21、按照如下公式估计所述双模雷达最终的接收信号的协方差矩阵
22、
23、式中,j表示采样快拍数,x(tj)表示对x(t)采样得到的第tj个采样快拍数据,h表示共轭转置;
24、对所述协方差矩阵进行特征值分解:
25、
26、式中,us表示信号子空间数据矩阵,un表示噪声子空间数据矩阵,λs和λn均为由特征值组成的对角矩阵。
27、在本发明的一个实施例中,基于信号子空间理论,根据信号子空间数据矩阵计算mimo雷达模式的第一信号子空间数据矩阵及fda-mimo雷达模式的第二信号子空间数据矩阵,并估计目标的接收角度的步骤,包括:
28、根据所述导向矢量矩阵a和所述信号子空间数据矩阵us,计算非奇异矩阵t,其中,us=at;
29、按照如下公式计算mimo雷达模式的第一信号子空间数据矩阵:
30、usr1=ar1t;
31、按照如下公式计算fda-mimo雷达模式的第二信号子空间数据矩阵:
32、usr2=ar2t;
33、式中,m为mimo雷达模式的发射阵元数m1与fda-mimo雷达模式的发射阵元数m2之和;
34、利用所述非奇异矩阵t、ar1和ar2,估计目标的接收角度。
35、在本发明的一个实施例中,ar2=ar1φr;
36、利用所述非奇异矩阵t、ar1和ar2,估计目标的接收角度的步骤,包括:
37、利用ar1和ar2,计算l×l维的对角矩阵φr,其中
38、
39、式中,diag表示对角矩阵;
40、按照如下公式计算φr的相似矩阵ψr:
41、ψr=t-1φrt;
42、按照如下公式对φr的相似矩阵ψr进行特征分解:
43、
44、式中,为ψr的l个特征值构成的对角矩阵,为中的对角线元素,gr为l个特征值对应的特征向量构成的矩阵;
45、按照如下公式估计目标l的接收角度:
46、
47、式中,表示中的第l个对角线元素。
48、在本发明的一个实施例中,mimo雷达模式的第一对角矩阵为:
49、
50、fda-mimo雷达模式的第一对角矩阵为:
51、
52、mimo雷达模式的第二对角矩阵为:
53、
54、式中,
55、fda-mimo雷达模式的第二对角矩阵为:
56、
57、在本发明的一个实施例中,利用mimo雷达模式的第二对角矩阵中的对角线元素,按照如下公式估计目标的发射角度:
58、
59、式中,表示mimo雷达模式的第二对角矩阵中第l个对角线元素,为估计得到的mimo雷达模式下第l个目标的发射角度。
60、在本发明的一个实施例中,根据所述mimo雷达模式下第l个目标的发射角度,按照如下公式估计目标距离:
61、
62、式中,表示fda-mimo雷达模式的第二对角矩阵中第l个元素,为针对第l个目标估计得到的目标距离。
63、与现有技术相比,本发明的有益效果在于:
64、本发明提供一种双基地mimo和fda-mimo双模式雷达协同目标定位方法,通过联合双模雷达的回波数据实现目标doa、dod和距离的高精度估计,不仅避免了子阵配对及复杂的雷达阵列设计,也获得了性能更优的目标定位效果。
65、以下将结合附图及实施例对本发明做进一步详细说明。
- 还没有人留言评论。精彩留言会获得点赞!