一种宽刈幅海面风场反演方法、装置、设备和介质与流程
本发明涉及gnss反射信号遥感,特别涉及一种宽刈幅海面风场反演方法、装置、设备和介质。
背景技术:
1、全球导航卫星反射信号遥感(gnss reflectometry,gnss-r)是一种利用地球表面反射的全球导航卫星信号的新型遥感技术。gnss-r技术使用导航卫星的l波段信号(~1.5ghz),不受强降雨影响,测量风速范围大,可观测台风中心区域高风速。同时gnss-r技术无需主动发射信号,具有信号源充足、功耗小、成本低的特点,便于形成星座组网观测,可提供高时间分辨率的观测数据。
2、gnss-r观测的l1时延多普勒图(ddm)是一种在时延和多普勒方向的二维相干功率波形,每一个时延和多普勒频率对应一个ddm功率观测值。然而受限于空间分辨率的要求,目前的星载gnss-r风速反演算法仅能利用原始ddm观测值的中很小的一部分建立观测量来反演镜像点处的风速,丢失了大量的信息,且仅能反演风速,无风向信息。
技术实现思路
1、鉴于上述问题,本发明实施例提供了一种宽刈幅海面风场反演方法、装置、设备和介质,以便克服上述问题或者至少部分地解决上述问题。
2、本发明实施例的第一方面,公开了一种宽刈幅海面风场反演方法,所述方法包括:
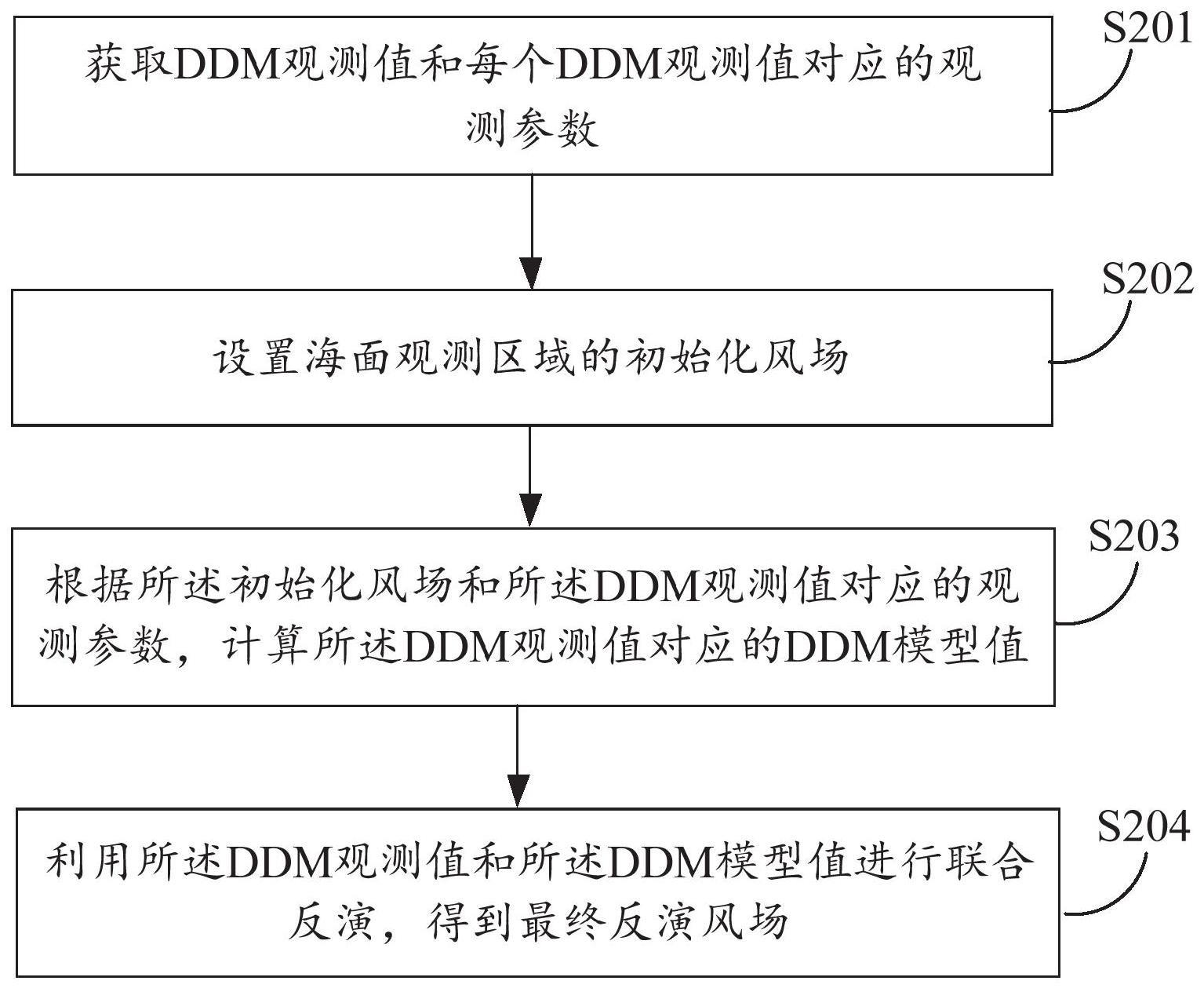
3、获取ddm观测值和每个ddm观测值对应的观测参数;
4、设置海面观测区域的初始化风场;
5、根据所述初始化风场和所述ddm观测值对应的观测参数,计算所述ddm观测值对应的ddm模型值;
6、利用所述ddm观测值和所述ddm模型值进行联合反演,得到最终反演风场。
7、可选地,所述利用所述ddm观测值和所述ddm模型值进行联合反演,得到最终反演风场,包括:
8、设置反演初始化参数;
9、计算所述ddm模型值对应的线性化矩阵;
10、利用所述ddm观测值、所述ddm模型值、以及所述ddm模型值对应的线性化矩阵进行联合反演,得到最终反演风场。
11、可选地,所述利用所述ddm观测值和所述ddm模型值进行联合反演,得到最终反演风场,包括:
12、根据第k-1次的反演风场和第k个ddm观测值对应的观测参数,计算第k个ddm观测值对应的第k个ddm模型值,其中,第1次的反演风场为所述初始化风场;
13、利用所述第k个ddm观测值和所述第k个ddm模型值进行第k次联合反演,得到第k次的反演风场;
14、满足反演结束条件,输出最后一次的反演风场为最终反演风场。
15、可选地,所述方法还包括:
16、基于同一个海面观测区域的多个连续的ddm观测值和每个ddm观测值的观测参数进行多次联合反演,得到该海面观测区域的最终反演风场;
17、获取下一个海面观测区域的多个连续的ddm观测值和每个ddm观测值的观测参数进行多次联合反演,得到下一个海面观测区域的最终反演风场;
18、依次对不同海面观测区域进行联合反演,以得到整个海面区域的最终反演风场。
19、可选地,所述根据所述初始化风场和所述ddm观测值对应的观测参数,计算所述ddm观测值对应的ddm模型值,包括:
20、对海面观测区域进行网格化处理,得到网格化的初始化风场;
21、基于所述网格化的初始化风场和所述ddm观测值对应的观测参数,计算所述ddm观测值对应的ddm模型值,所述观测参数包括:卫星的几何信息和功率信息。
22、可选地,所述对海面观测区域进行网格化处理,得到网格化的初始化风场,包括:
23、以镜面反射点为中心,以gnss卫星和接收机为参考,建立局部坐标系;
24、基于所述局部坐标系对海面观测区域以目标分辨率进行网格划分,得到网格化的初始化风场。
25、可选地,所述以镜面反射点为中心,以gnss卫星和接收机为参考,建立局部坐标系,包括:
26、以地心为局部坐标系原点,x轴与反射面在地球表面的投影方向平行,指向接收机方向,以地心指向镜面反射点的方向为z轴,按照右手螺旋定则确定y轴。
27、可选地,所述基于所述网格化的初始化风场和所述ddm观测值对应的观测参数,计算出所述ddm观测值对应的ddm模型值,包括:
28、基于网格化风场、二维海面坡度模型、海面电磁散射模型,构建观测方程;
29、基于所述观测方程,利用所述网格化的初始化风场和所述ddm观测值对应的观测参数计算ddm模型值。
30、可选地,所述观测方程表示为:
31、
32、其中,为ddm模型值,m为向量化的网格化海面风场,m为一个网格处的风速分量,ptgt为gnss信号的等效全向辐射功率,gr为gnss反射信号接收天线增益,rt和rr分别为gnss卫星和反射信号接收机到反射网格δa的空间距离,χ2()为gnss信号的模糊度函数,δa为每个网格的面积,λ为gnss信号的波长,σ0为归一化双基雷达散射截面,τn和fn分别为时延和多普勒频率,为镜面反射点到第i个反射网格δa的向量。
33、可选地,所述归一化双基雷达散射截面σ0表示为:
34、
35、其中,m为一个网格处的风速分量,为菲涅尔散射系数,q,qz均为与几何位置有关的量,p为海面坡度的概率密度分布函数,为镜面反射点到反射网格δa的向量,s为海面坡度向量。
36、可选地,所述海面坡度的概率密度分布函数是二维非均匀性正态函数,用于描述海面坡度和引入海面风向信息,所述海面坡度的概率密度分布函数表示为:
37、
38、其中,d为海面坡度的二阶矩阵,s为海面坡度向量,。
39、可选地,所述设置反演初始化参数,包括:
40、设置初始化风场的误差协方差矩阵,所述初始化风场的误差矩阵协方差为单位矩阵;
41、设置ddm的误差协方差矩阵,所述ddm的误差矩阵协方差为对角矩阵。
42、可选地,所述计算所述ddm模型值对应的线性化矩阵,包括:
43、对ddm模型值不同时延和不同多普勒的功率点进行求导,得到线性化矩阵。
44、可选地,所述线性化矩阵h表示为:
45、
46、其中,为功率点在风场m1下的导数,为功率点在风场m2m下的导数,为功率点在风场m1下的导数,为功率点在风场m2m下的导数,m1表示向量化的网格化海面风场m中的第1个元素,m2m表示向量化的网格化海面风场中m的第2m个元素。
47、可选地,所述利用所述ddm观测值、所述ddm模型值、以及所述ddm模型值对应的线性化矩阵进行联合反演,包括:
48、将初始化风场的误差协方差矩阵、观测ddm的误差协方差矩阵、所述ddm观测值、所述ddm模型值、以及所述线性化矩阵输入扩展卡尔曼滤波公式;
49、基于所述扩展卡尔曼滤波公式,迭代计算风场每个网格点的风速,所述风速包括:水平分量风速和垂直分量风速。
50、可选地,所述扩展卡尔曼滤波公式,表示为:
51、
52、
53、
54、
55、
56、其中,k为ddm观测值序列号,mk为第k个ddm观测值对应的海面上网格内的风速向量,为第k个ddm观测值对应的海面上网格内的先验估计的风速向量,为第k个ddm观测值对应的海面上网格内的后验估计的风速向量,为第k+1个ddm观测值对应的海面上网格内的后验估计的风速向量,yk为向量形式的第k个ddm观测值向量,hk为ddm模型值,rk为ddm的误差协方差矩阵,和分别为mk的先验和后验协方差矩阵,为mk+1的先验协方差矩阵,hk为hk的线性化矩阵,i为单位矩阵,qk为状态转移误差矩阵,kk为卡尔曼增益。
57、可选地,所述反演结束条件,包括以下任一者:
58、当迭代次数等于反演ddm观测值的个数,反演结束;
59、当所述ddm观测值与所述ddm模型值之间的误差达到预设值,反演结束。
60、本发明实施例的第二方面,公开了一种宽刈幅海面风场反演装置,所述装置包括:
61、数据获取模块,用于获取ddm观测值和每个ddm观测值对应的观测参数;
62、风场设置模块,用于设置海面观测区域的初始化风场;
63、数据计算模块,用于根据所述初始化风场和所述ddm观测值对应的观测参数,计算所述ddm观测值对应的ddm模型值;
64、风场反演模块,用于利用所述ddm观测值和所述ddm模型值进行联合反演,得到最终反演风场。
65、本发明实施例的第三方面,公开了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行时实现如本发明实施例第一方面所述的宽刈幅海面风场反演方法。
66、本发明实施例的第四方面,公开了一种计算机可读存储介质,其上存储有计算机程序/指令,该计算机程序/指令被处理器执行时实现本发明实施例第一方面所述的宽刈幅海面风场反演方法。
67、本发明实施例包括以下优点:
68、在本发明实施例中,提了一种利用全部的ddm观测值的宽刈幅海面风场反演方法,首先,获取ddm观测值和每个ddm观测值对应的观测参数,并根据所述初始化风场和所述ddm观测值对应的观测参数,计算所述ddm观测值对应的ddm模型值,利用所述ddm观测值和所述ddm模型值进行联合反演,进而得到最终反演风场。由于是利用全部的ddm观测值进行反演,在保证空间分辨率的情况下反演的得到观测刈幅内的网格化风场,相比于现有技术仅能反演镜像点处风速,本实施例的宽刈幅海面风场反演更能发挥gnss-r技术的潜能,同时得到海面风向信息和风速信息,解析海面风场结构,有利于监控台风等极端天气。
- 还没有人留言评论。精彩留言会获得点赞!