基于天基预警雷达的波位设计方法及系统
本发明涉及星载雷达波位设计方法的,具体地,涉及基于天基预警雷达的波位设计方法及系统。
背景技术:
1、天基预警雷达系统由于具有全天时、全天候、大范围、高精度的探测优势,从而在远程预警、目标监测等场景得到了广泛地应用和发展。对于工作于搜索模式的预警雷达系统,需要预先设置雷达扫描波位和各个波位上的波束驻留时间以实现观测空域的有效覆盖,因此,合理的波位设计方案是天基预警雷达系统实现有效目标检测的重要前提。传统波位覆盖设计方法通过雷达天线尺寸计算雷达波束主瓣宽度,实现距离-方位的两维波束覆盖,该方法由于没有考虑雷达波束宽度随波束扫描变化的特点,从而极大降低了雷达能量资源的利用率。此外,进一步考虑雷达波束宽度的变化特点,利用变化的波束主瓣宽度实现波位划分的方案进一步被提出,从而有效提高了雷达波束资源的利用率。但是上述方法都没有考虑雷达在一个波位内的回波接收窗时间边界问题,因此使得一个波位内难以保证距离维无模糊区间可以覆盖整个俯仰波位。
2、因此,需要提出一种新的方案以改善上述技术问题。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种基于天基预警雷达的波位设计方法及系统。
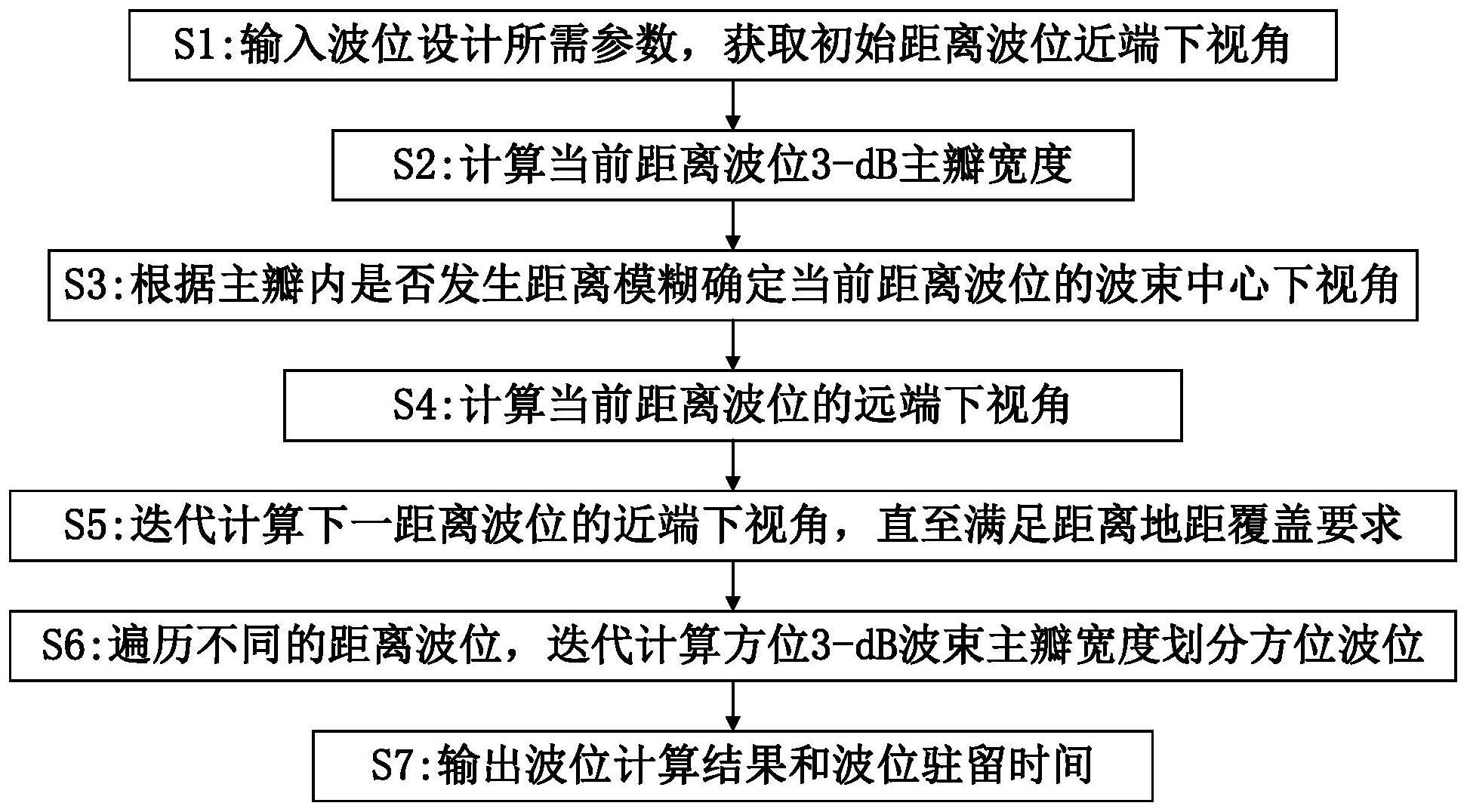
2、根据本发明提供的一种基于天基预警雷达的波位设计方法,所述方法包括如下步骤:
3、步骤s1:获取雷达系统扫描时间、雷达距离-方位地面覆盖范围、波束覆盖重叠率、雷达方位波束中心以及雷达初始距离波位近端下视角;
4、步骤s2:根据当前距离波位的近端下视角取值确定当前距离波位的3-db主瓣俯仰波束宽度,判断当前主瓣波束宽度内是否发生距离模糊,若发生距离模糊,则根据脉冲重复时间计算当前距离波位的下视角波束中心,若无距离模糊,则根据3-db主瓣波束宽度计算当前距离波位的下视角波束中心取值;
5、步骤s3:根据当前距离波位的波束中心计算结果计算当前距离波位的远端下视角取值;
6、步骤s4:基于波束覆盖重叠率和当前距离波位的覆盖地距,计算下一距离波位的近端下视角为当前波位的近端下视角,迭代处理至波束覆盖范围超过给定距离地距覆盖要求,得到距离波位的划分结果;
7、步骤s5:遍历不同的距离波位,依次根据每个方位波位的近端空间锥角计算3-db方位主瓣波束宽度,依次更新方位波位的波束中心、远端下视角,迭代处理至方位地距满足给定方位覆盖要求;
8、步骤s6:输出满足距离-方位覆盖要求的波位设计计算结果和每个波位所需的驻留时间。
9、优选地,所述步骤s2中3-db主瓣俯仰波束宽度利用所述当前距离波位的近端下视角,结合雷达发射接收方向图通过一维搜索获取。
10、优选地,基于所述当前距离波位的3-db主瓣俯仰波束宽度,当前距离波位所述波束中心下视角计算表达式为:
11、
12、式中,θel,left,k表示第k个距离波位的近端下视角,rs,left,k表示k个距离波位的近端斜距,δθel,3db表示第k个距离波位的3-db俯仰波束主瓣宽度,表示对应第k个距离波位的3-db俯仰波束主瓣宽度的远端斜距,c为光速,prt为脉冲重复时间,h为雷达平台高度,re表示地球半径,acos(·)为反余弦函数,|·|表示绝对值符号。
13、优选地,所述当前距离波位的远端下视角计算表达式为:
14、θel,right,k=2θel,bc,k-θel,left,k (2)
15、式中,θel,right,k为第k个距离波位的远端下视角。
16、优选地,所述步骤s4中下一距离波位的近端下视角计算表达式为:
17、
18、式中,θel,left,k+1为第k+1个距离波位的近端下视角,rs,left,k+1为第k+1个距离波位的近端斜距;
19、所述第k+1个距离波位的近端斜距计算表达式为:
20、
21、式中,rs,left,k+1为第k+1个距离波位的近端斜距,θc,left,k+1为第k+1个距离波位的近端波束照射点与星下点之间连线对应的地心张角;
22、所述第k+1个距离波位的近端波束照射点与星下点之间连线对应的地心张角计算表达式为:
23、
24、式中,α为雷达波位覆盖重叠率,rg,left,k为第k个距离波位的近端距离地距,rg,right,k为第k个距离波位的远端距离地距。
25、本发明还提供一种基于天基预警雷达的波位设计系统,所述系统包括如下模块:
26、模块m1:获取雷达系统扫描时间、雷达距离-方位地面覆盖范围、波束覆盖重叠率、雷达方位波束中心以及雷达初始距离波位近端下视角;
27、模块m2:根据当前距离波位的近端下视角取值确定当前距离波位的3-db主瓣俯仰波束宽度,判断当前主瓣波束宽度内是否发生距离模糊,若发生距离模糊,则根据脉冲重复时间计算当前距离波位的下视角波束中心,若无距离模糊,则根据3-db主瓣波束宽度计算当前距离波位的下视角波束中心取值;
28、模块m3:根据当前距离波位的波束中心计算结果计算当前距离波位的远端下视角取值;
29、模块m4:基于波束覆盖重叠率和当前距离波位的覆盖地距,计算下一距离波位的近端下视角为当前波位的近端下视角,迭代处理至波束覆盖范围超过给定距离地距覆盖要求,得到距离波位的划分结果;
30、模块m5:遍历不同的距离波位,依次根据每个方位波位的近端空间锥角计算3-db方位主瓣波束宽度,依次更新方位波位的波束中心、远端下视角,迭代处理至方位地距满足给定方位覆盖要求;
31、模块m6:输出满足距离-方位覆盖要求的波位设计计算结果和每个波位所需的驻留时间。
32、优选地,所述模块m2中3-db主瓣俯仰波束宽度利用所述当前距离波位的近端下视角,结合雷达发射接收方向图通过一维搜索获取。
33、优选地,基于所述当前距离波位的3-db主瓣俯仰波束宽度,当前距离波位所述波束中心下视角计算表达式为:
34、
35、式中,θel,left,k表示第k个距离波位的近端下视角,rs,left,k表示k个距离波位的近端斜距,δθel,3db表示第k个距离波位的3-db俯仰波束主瓣宽度,表示对应第k个距离波位的3-db俯仰波束主瓣宽度的远端斜距,c为光速,prt为脉冲重复时间,h为雷达平台高度,re表示地球半径,acos(·)为反余弦函数,|·|表示绝对值符号。
36、优选地,所述当前距离波位的远端下视角计算表达式为:
37、θel,right,k=2θel,bc,k-θel,left,k (2)
38、式中,θel,right,k为第k个距离波位的远端下视角。
39、优选地,所述模块m4中下一距离波位的近端下视角计算表达式为:
40、
41、式中,θel,left,k+1为第k+1个距离波位的近端下视角,rs,left,k+1为第k+1个距离波位的近端斜距;
42、所述第k+1个距离波位的近端斜距计算表达式为:
43、
44、式中,rs,left,k+1为第k+1个距离波位的近端斜距,θc,left,k+1为第k+1个距离波位的近端波束照射点与星下点之间连线对应的地心张角;
45、所述第k+1个距离波位的近端波束照射点与星下点之间连线对应的地心张角计算表达式为:
46、
47、式中,α为雷达波位覆盖重叠率,rg,left,k为第k个距离波位的近端距离地距,rg,right,k为第k个距离波位的远端距离地距。
48、与现有技术相比,本发明具有如下的有益效果:
49、本发明提出了一种基于天基预警雷达系统的波位设计方法,该方法考虑雷达波束随照射区域变化的特点的同时,结合雷达俯仰主瓣波束照射宽度与距离模糊之间关系,分情况实现距离波位的划分处理,从而完成了给定距离-方位覆盖要求下的二维波位设计,并得到了最终的波位驻留时间,进一步提高了雷达波束资源利用率。
- 还没有人留言评论。精彩留言会获得点赞!