一种基于多源信息融合的行人室内导航方法、装置及介质
本发明涉及导航,尤其涉及一种基于多源信息融合的行人室内导航方法、装置及介质。
背景技术:
1、随着社会的发展与进步,人们的生活水平日益提高,对于可靠、实时的基于位置服务需求也越来越高。然而,在室内条件下,由于室内环境复杂多变,存在障碍物多、干扰源多等问题,使得卫星导航信号定位性能变差,在室内定位中效果较差。在卫星导航失效时,常见的导航方法有:
2、(1)惯性导航,基于惯性器件的室内定位技术是以惯性传感器为基础进行的惯性导航,主要包括行人惯性导航系统pins和行人航位推算pdr两种方式。前者往往要求传感器的精度较高,并且需要通过抑制误差漂移以保证长时间的定位可靠性;后者往往对传感器的精度要求较低,依赖于人行走的特性,通过跨步检测,在行人航向上以步长累积的方式更新行人位置。相比于pins,pdr往往能够在成本有限的条件下,实现更好的定位效果,获得更高的成本效益。然而,由于低成本的mems惯性传感器往往误差较大,并且误差会随着时间而逐渐累积,这对定位结果造成了极为不利的影响。
3、(2)wi-fi定位,近年来由于wi-fi技术的普及,大部分室内已经有wi-fi信号覆盖,基于wi-fi信号实现的定位技术,虽然有大量已有的基础设施提供支持,并且通过智能手机可以直接获取wi-fi的信号强度,在很大程度上推动了wi-fi定位技术的发展,但由于wi-fi信号易受环境干扰,定位精度通常难以保证。
4、(3)多源信息融合的室内定位技术,多源信息融合技术利用多个传感器获取的信息,按照特定的规则对这些信息进行分类、处理、融合和使用,实现各传感器之间的信息优势互补。与惯性导航优势互补,有效抑制惯性导航累积误差,进一步提高了定位精度。
5、随着人们对室内高精度定位需求的日益增加,定位精度要求也随之提高,但是尚缺少一种室内高精度定位的技术方案。
技术实现思路
1、为至少一定程度上解决现有技术中存在的技术问题之一,本发明的目的在于提供一种基于多源信息融合的行人室内导航方法、装置及介质。
2、本发明所采用的技术方案是:
3、一种基于多源信息融合的行人室内导航方法,包括以下步骤:
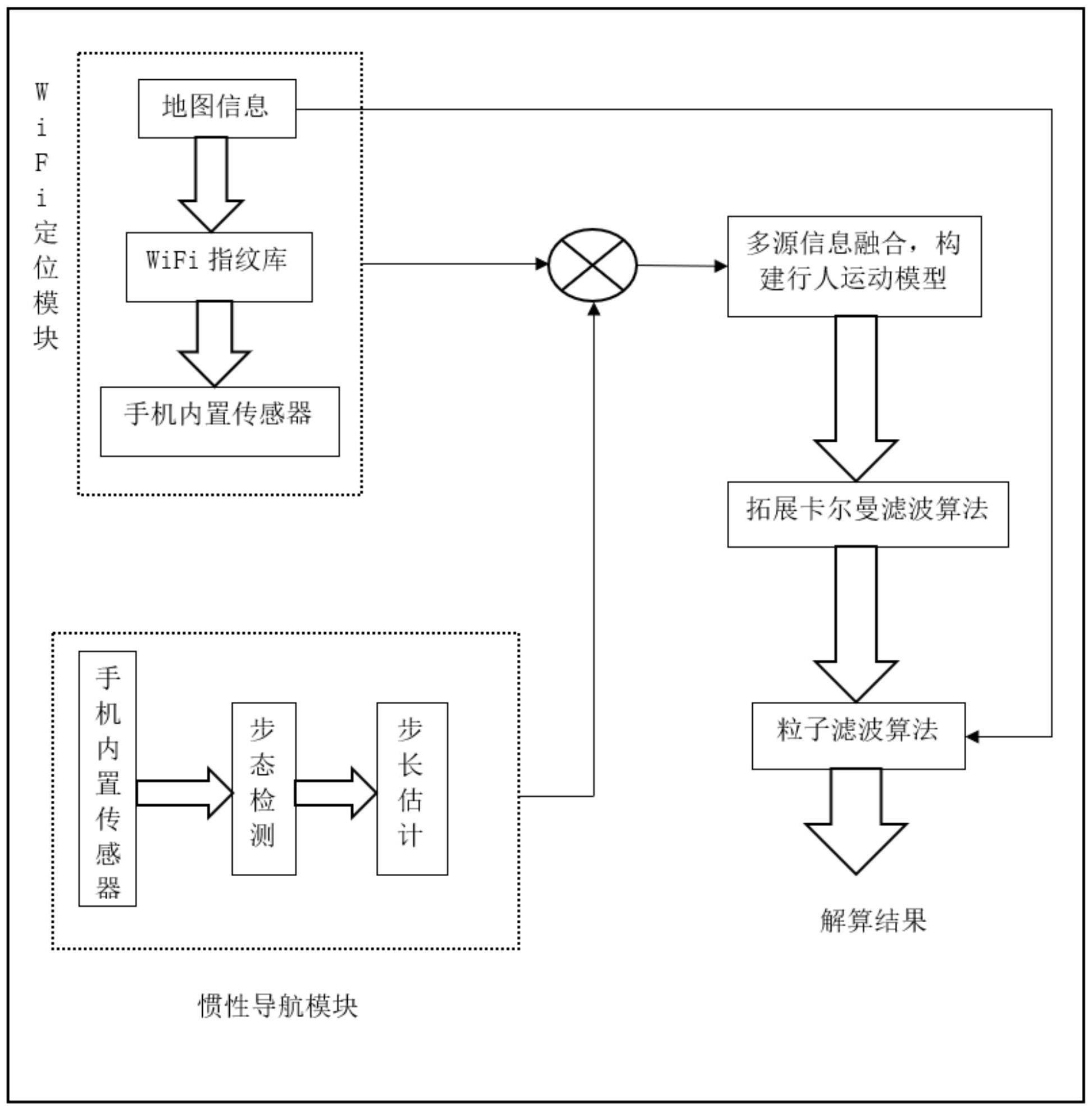
4、构建当前室内环境的地图信息,在地图上选取参考点,建立wi-fi指纹库;
5、利用智能终端上的传感器获取多源信息,所述多源信息包括wi-fi信号强度,角速度,速度,加速度以及姿态信息;
6、根据所述wi-fi信号强度和wi-fi指纹库,构建行人的位置模型,得到行人的位置信息;
7、通过所述姿态信息判断智能终端的瞬时姿态,将加速度从载体坐标系转化到导航坐标系,通过步态检测与步长估计获得行人的运动距离;
8、根据多源信息和运动距离,构建行人的运动模型,得到行人的运动信息,所述运动信息包括:位置、速度;根据扩展卡曼滤波算法,构建基于扩展卡尔曼滤波的融合模型,将多源信息以及行人的位置信息进行融合处理,获取融合后的位置信息,完成拓展卡尔曼滤波中状态向量更新及对误差值的最优估计;
9、利用融合后的位置信息,根据地图信息和粒子滤波算法对行人的位置信息进行进一步的修正与更新,完成多源信息融合的行人室内导航。
10、进一步地,所述行人的位置模型的表达式为:
11、
12、其中,表示估计的位置,x(tk)、y(tk)表示前k个位置点对应的位置坐标,ωj(tk)表示相应数据点的权重系数,基于信号强度的权重系数可表示rssi为信号强度。
13、进一步地,采用以下方式将加速度从载体坐标系转化到导航坐标系:
14、
15、其中,为导航系到载体系的方向余弦矩阵,cr为绕y轴的旋转矩阵,cp为绕z轴的旋转矩阵,cy为绕x轴的旋转矩阵,γ为绕y轴的旋转角度,p为绕x轴的旋转角度,y为绕z轴的旋转角度。
16、进一步地,所述步态检测的步骤包括:
17、计算整体加速度:
18、
19、式中,ax,ay,az为采集的三轴加速度值,通过计算整体加速度a来降低传感器姿态的影响;
20、根据整体加速度,在滑动窗口中获得潜在峰值,利用预设的加速度阈值进行初次判断;
21、计算潜在波峰与前一波峰时间差,利用预设的行走一步时间阈值范围进行二次判断;
22、将潜在波峰处与前后邻域加速度比较,进行三次判断去除伪波峰,若潜在峰值点为最大值则算法记一步,否则不做计步处理。
23、进一步地,所述步长估计为:
24、
25、其中sl为步长,amax和amin分别为行人纵向加速度的最大值和最小值。
26、进一步地,所述扩展卡曼滤波算法包括:
27、xk+1=f(xk)+wk
28、其中,xk+1为第k+1步的状态变量,xk为第k步的状态变量,wk为过程噪声;f()为扩展卡尔曼滤波中的非线性状态函数;
29、实现系统矩阵线性化的方法包括:
30、
31、其中,zk为观测变量,vk为观测噪声,h()为扩展卡尔曼滤波中的量测函数;
32、实现观测矩阵线性化的方法包括:
33、
34、其中,hk为h(x)对x偏导的雅可比矩阵,为第k步的状态估计。
35、进一步地,拓展卡尔曼滤波中状态向量更新的步骤包括:
36、一步状态预测更新:
37、
38、式中,为上一状态的最优值,为当前状态的一步预测值;
39、一步预测估计误差协方差矩阵更新:
40、
41、式中,pk+1|k为对应的协方差一步预测值,φk+1|k为状态转移矩阵,pk|k为对应的协方差,为φk+1|k的转置,qk为过程噪声协方差矩阵;
42、计算扩展卡尔曼滤波增益:
43、
44、式中,kk+1为扩展卡尔曼滤波增益矩阵,hk+1为观测矩阵,为观测矩阵的转置,rk+1为测量噪声协方差矩阵;
45、由观测向量计算新息,并更新状态估计:
46、
47、式中,为当前状态的最优估计值,zk+1为当前观测值,为当前观测预测值;更新估计误差协方差:
48、pk+1=[i-kk+1hk+1]pk+1|k
49、式中,pk+1为对应的协方差,i为单位矩阵。
50、进一步地,所述根据地图信息和粒子滤波算法对行人的位置信息进行进一步的修正与更新,包括:
51、粒子滤波的状态转移方程和观测方程如下:
52、x(t)=f(x(t-1),u(t),w(t))
53、y(t)=f(x(t),e(t))
54、式中,x(t)为t时刻状态,u(t)为控制量,w(t)和e(t)分别为状态噪音和观测噪音,粒子滤波从观测y(t)和上个时刻状态x(t-1),u(t),w(t)中过滤出t时刻的状态x(t);
55、粒子滤波中的更新方法主要包含以下步骤:
56、a1、初始化:将观测值初值xi(k)作为概率密度函数x(0)的初值,由对进行n次抽样,初始wi(k)设为
57、a2、一步预测:对每个粒子xi(k),通过转换公式p(x(k+1)|xi(k))获得一个新的粒子;
58、a3、重要性采样:对于任一粒子xi(k+1)求解它们的权值wi(k+1)=p(z(k+1)|xi(k+1));
59、a4、归一化:对权值进行归一化处理:
60、
61、a5、重采样:根据权重大小对粒子进行重采样,权重大的粒子重复的概率较大,权重较小的粒子重复概率小;
62、a6、粒子更新同时加入地图信息:
63、
64、由于室内行走区域存在限值,根据地图信息进行地图匹配,当一步预测的粒子越过可通行区域时(如越墙),则将它的权重值赋为0:
65、
66、a7、采用基本的粒子滤波算法进行计算,根据解算结果完成行人室内定位及导航。
67、本发明所采用的另一技术方案是:
68、一种基于多源信息融合的行人室内导航装置,包括:
69、至少一个处理器;
70、至少一个存储器,用于存储至少一个程序;
71、当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现上所述方法。
72、本发明所采用的另一技术方案是:
73、一种计算机可读存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由处理器执行时用于执行如上所述方法。
74、本发明的有益效果是:本发明引入多源信息融合技术,引入拓展卡尔曼滤波算法和粒子滤波算法,同时加入wi-fi指纹匹配与地图信息,创建合适的模型,修正惯性导航系统中的误差,为系统提供更加安全可靠和精准的位置信息。
- 还没有人留言评论。精彩留言会获得点赞!