停车场地图数据的高程确定方法、装置及设备与流程
本技术涉及高程确定,尤其涉及一种停车场地图数据的高程确定方法、装置及设备。
背景技术:
1、停车场地图是停车场的空间表达,停车场地图可实现场内所有要素可视化,通过地图可满足访客反向寻车、车位查找、场内路线规划等需求。
2、目前的停车场地图主要用于满足用户在停车场内的可视化需求,其停车场地图数据为针对停车场内要素可视化的二维数据,因此在用户需要查找停车场位置等场景下,通常还需要根据停车场地图所附带的楼层信息来查找对应停车场的位置,但是由于楼层信息通常是在停车场地图的基础上额外添加的,其有可能附带错误的楼层信息,从而导致停车场的位置查找的不精准。
技术实现思路
1、本技术提供一种停车场地图数据的高程确定方法、装置及设备,以至少解决上述技术问题之一。
2、根据本技术的一方面,提供停车场地图数据的高程确定方法,包括:
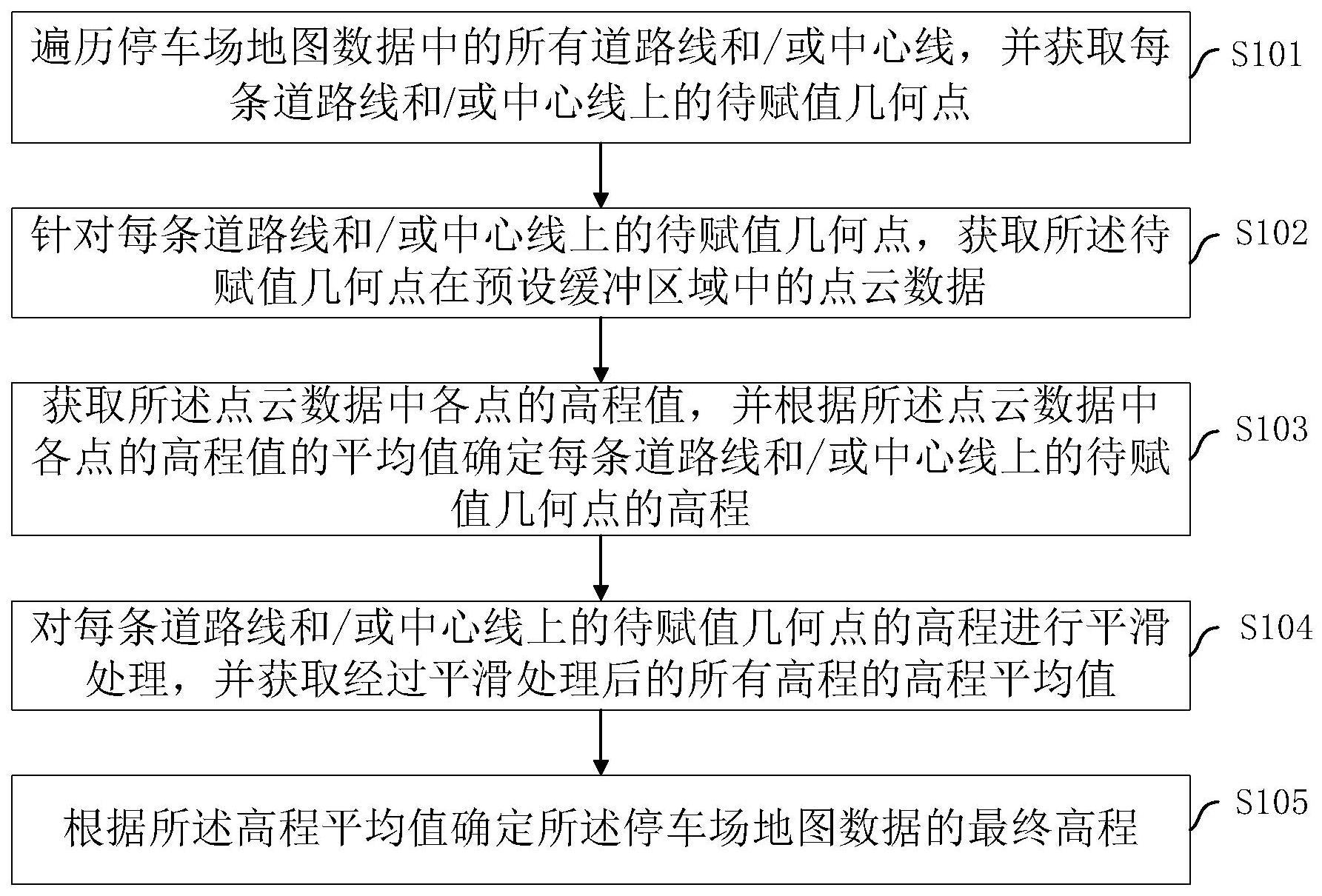
3、遍历停车场地图数据中的所有道路线和/或中心线,并获取每条道路线和/或中心线上的待赋值几何点,所述停车场地图数据包括空间数据shp格式数据;
4、针对每条道路线和/或中心线上的待赋值几何点,获取所述待赋值几何点的预设缓冲区域中的点云数据;
5、获取所述点云数据中各点的高程值,并根据所述点云数据中各点的高程值的平均值确定每条道路线和/或中心线上的待赋值几何点的高程;
6、对每条道路线和/或中心线上的待赋值几何点的高程进行平滑处理,并获取经过平滑处理后的所有高程的高程平均值,以根据所述高程平均值确定所述停车场地图数据的最终高程。
7、在一种实施方式中,所述预设缓冲区域的获取方式包括:
8、针对每条道路线和/或中心线所在的平面,以所述待赋值几何点为圆心、预设过滤长度为半径生成圆形区域,并将所述圆形区域确定为所述待赋值几何点的预设缓冲区域。
9、在一种实施方式中,所述对每条道路线和/或中心线上的待赋值几何点的高程进行平滑处理,包括:
10、针对每条道路线和/或中心线上的待赋值几何点,根据所述待赋值几何点的高程,确定所述待赋值几何点中的待平滑几何点,并对所述待平滑几何点的高程进行平滑处理。
11、在一种实施方式中,所述根据所述待赋值几何点的高程,确定所述待赋值几何点中的待平滑几何点,包括:
12、按照所述待赋值几何点的高程大小对所述待赋值几何点进行排序,并选择高程最小的待赋值几何点和高程次小的待赋值几何点;
13、若所述高程最小的待赋值几何点和高程次小的待赋值几何点之间的高程差小于或等于第一预设阈值,且二者之间的坡度值大于第二预设阈值,则将除了所述高程最小的待赋值几何点和高程次小的待赋值几何点之外的其它待赋值几何点确定为待平滑几何点。
14、在一种实施方式中,所述对所述待平滑几何点进行平滑处理,包括:
15、获取所述待平滑几何点到所述高程最小的待赋值几何点之间的距离;
16、根据所述距离、所述坡度值以及所述高程最小的待赋值几何点的高程,获取所述待平滑几何点的平滑高程,并将所述平滑高程赋值给所述待平滑几何点。
17、在一种实施方式中,在根据所述高程平均值确定所述停车场地图数据的最终高程之后,还包括:
18、基于所述最终高程更新所述停车场地图数据,并将更新后的停车场数据发送至目标终端,以使所述目标终端基于更新后的停车场数据确定对应停车场的位置。
19、根据本技术的第二方面,提供一种停车场地图数据的高程确定装置,包括:
20、几何点确定模块,其设置为遍历停车场地图数据中的所有道路线和/或中心线,并获取每条道路线和/或中心线上的待赋值几何点;
21、第一高程确定模块,其设置为针对每条道路线和/或中心线上的待赋值几何点,获取所述待赋值几何点在预设缓冲区域中的点云数据;并获取所述点云数据中各点的高程值,并根据所述点云数据中各点的高程值的平均值确定每条道路线和/或中心线上的待赋值几何点的高程;
22、高程平滑模块,其设置为对每条道路线和/或中心线上的待赋值几何点的高程进行平滑处理;
23、第二高程确定模块,其设置为获取经过平滑处理后的所有高程的高程平均值,以根据所述高程平均值确定所述停车场地图数据的最终高程。
24、在一种实施方式中,所述预设缓冲区域的获取方式包括:针对每条道路线和/或中心线所在的平面,以所述待赋值几何点为圆心、预设过滤长度为半径生成圆形区域,并将所述圆形区域确定为所述待赋值几何点的预设缓冲区域。
25、在一种实施方式中,所述对高程平滑模块包括:
26、平滑点确定单元,其设置为针对每条道路线和/或中心线上的待赋值几何点,根据所述待赋值几何点的高程,确定所述待赋值几何点中的待平滑几何点;
27、平滑处理单元,其设置为对所述待平滑几何点的高程进行平滑处理。
28、在一种实施方式中,所述平滑点确定单元具体设置为,按照所述待赋值几何点的高程大小对所述待赋值几何点进行排序,并选择高程最小的待赋值几何点和高程次小的待赋值几何点;若所述高程最小的待赋值几何点和高程次小的待赋值几何点之间的高程差小于或等于第一预设阈值,且二者之间的坡度值大于第二预设阈值,则将除了所述高程最小的待赋值几何点和高程次小的待赋值几何点之外的其它待赋值几何点确定为待平滑几何点。
29、在一种实施方式中,所述平滑处理单元,具体设置为获取所述待平滑几何点到所述高程最小的待赋值几何点之间的距离;根据所述距离、所述坡度值以及所述高程最小的待赋值几何点的高程,获取所述待平滑几何点的平滑高程,并将所述平滑高程赋值给所述待平滑几何点。
30、在一种实施方式中,所述停车场地图数据为空间数据shp格式数据。
31、在一种实施方式中,所述装置还包括:
32、数据传输模块,其设置为基于所述最终高程更新所述停车场地图数据,并将更新后的停车场数据发送至目标终端,以使所述目标终端基于更新后的停车场数据确定对应停车场的位置。
33、根据本技术的第三方面,提供一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
34、所述存储器存储计算机执行指令;
35、所述处理器执行所述存储器存储的计算机执行指令,以实现所述的停车场地图数据的高程确定方法。
36、根据本技术的第四方面,提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现所述的停车场地图数据的高程确定方法。
37、根据本技术的第五方面,提供一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时所述的停车场地图数据的高程确定方法。
38、本技术提供的停车场地图数据的高程确定方法、装置及设备,通过遍历停车场地图数据中的所有道路线和/或中心线,并获取每条道路线和/或中心线上的待赋值几何点;针对每条道路线和/或中心线上的待赋值几何点,获取所述待赋值几何点在预设缓冲区域中的点云数据,并获取所述点云数据中各点的高程值,并根据所述点云数据中各点的高程值的平均值确定每条道路线和/或中心线上的待赋值几何点的高程;对每条道路线和/或中心线上的待赋值几何点的高程进行平滑处理,并获取经过平滑处理后的所有高程的高程平均值,以根据所述高程平均值确定所述停车场地图数据的最终高程。此过程中,一方面,通过确定停车场地图数据的高程,用户可以利用停车场地图数据的高程查找停车场位置,由于所确定的停车场地图数据的高程是定值,用户在没有楼层信息或楼层信息错误的情况下,基于停车场地图数据的高程信息快速、准确判断出停车场的位置,有效提升用户的停车体验;另一方面,利用缓冲区点云数据,以确定待赋值几何点高程,并对高程进行平滑的形式,为停车场地图高效赋值高程,处理速度较快,同时提高了停车场数据的高程赋值的准确性。
- 还没有人留言评论。精彩留言会获得点赞!