点云地图定位能力测评系统和方法与流程
本技术涉及增强现实领域,特别是涉及一种点云地图定位能力测评系统、方法、计算机设备和计算机可读存储介质。
背景技术:
1、ar设备的跟踪系统长时间运行后会固定地产生累计误差,为了长时间保持ar体验的稳定性以及虚实内容的贴合度,通常会利用预建地图,定时或定策略对ar设备的当前位姿进行更新校准。
2、预建地图的质量高低和定位算法的精度,直接决定了定位结果的准确度;与地图质量相关的条目包括:点云地图的尺寸准确度、3d点数量、3d点的位置准确度、3d点对应的特征点数量等。
3、由于场景中光照条件、纹理结构、动态变化等因素影响,导致同一定位算法在不同场景下的定位精度不同;在同一场景内的不同位置或不同朝向,定位精度也可能不同。为获得更好的ar体验,以及为目标场景下ar体验内容的设计提供数据支持,需要对具体场景下的视觉定位能力进行测评,即在某个特定的点云地图中,测评该地图的质量以及定位算法在该地图下的定位表现。
4、在相关技术中,场景下视觉定位质量评估方法包括如下几种:
5、1.通过昂贵的真值制作系统(例如vicon标定系统),在目标场地下进行实物布置之后,通过采集、分析处理包含标定实物的场景图像获得真值,最后,将该真值与地图定位结果进行对比,以测评地图的定位精度;
6、一种常见的基于vicon标定系统获取真值的做法是:在场景中多个位置架设钢架,该钢架上布置有多个小球,在布置且标定完成之后,相机利用当前视场图像中各个小球的反光强度来获得位姿真值。
7、然而,上述方案中存在如下缺陷:
8、(1)价格昂贵:作为参照物的真值实物通常批量化制作,对于小型slam项目来说成本较高,并且,无法针对类型繁多的各种ar应用场景制作相匹配的真值实物,更无法灵活地应用于toc或其他定制化ar项目中;
9、(2)空间限制性较高:由于vicon系统需要在受控的空间(如环境光恒定的室内场景)下进行运动捕捉,因此,对于大型slam项目(景区、商场)或者在复杂环境下进行的slam项目(如山体、建筑)来说,难以进行实物布置及标定,因此空间限制较大;
10、(3)对被跟踪物体要求较高:vicon系统对被跟踪的物体要求较高,需要在物体表面上贴有反光球或反光贴纸,对于部分应用场景无法适用。
11、2.使用原生传感器获取的参数作为评估基准,与算法输出的定位结果进行对比以实现地图的定位能力测评;
12、但是,传感器能够获取的参数只能覆盖测评指标的一部分,无法全面的反映地图定位精度,如惯性传感器(inertial measurement unit,imu)仅可测评朝向而无法测评位置;地球导航卫星系统(global navigation satellite system,gnss)仅可用于测评位置而无法测评朝向。
13、另外,imu数据和gnss数据本身存在固定误差,因此,使用该类数据作为真值进行定位测评时,由于无法避免误差,所以会影响到测评结果的准确性。同时,由于imu数据和gnss数据在某些环境下可能会失效或失准,因此,也无法适用于所有应用场景;例如,imu数据可能会受到震动或其他因素干扰而导致测量误差;在室内或在高楼大厦附近,gnss信号可能会受到遮挡或反射的影响而变得不准确。
14、另外,由于真值系统的坐标系与待评测地图的坐标系是相互独立的,因此,上述两种方案均必须使用se3或sim3变换将两者的坐标系对齐,而坐标系对齐又要求用于评测的轨迹必须具有一定的长度和满足一定的走向,否则对齐精度较差;即使在轨迹满足要求的情况下,仍无法避免的会出现对齐误差,也会影响定位地图能力评测的准确性。
技术实现思路
1、本技术实施例提供了一种点云地图定位能力测评系统、方法、计算机设备和计算机可读存储介质,以至少解决相关技术中测评方法适用场景受限的问题。
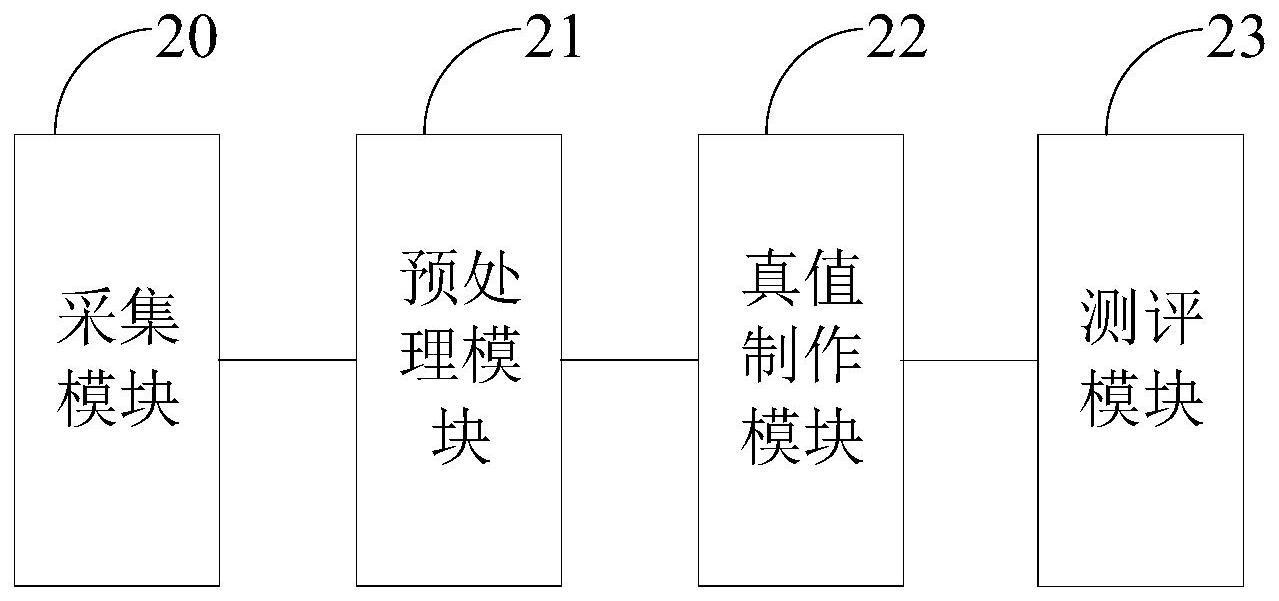
2、第一方面,本技术实施例提供了一种点云地图定位能力测评系统,所述系统包括:数据采集模块、预处理模块、真值制作模块和测评模块,其中,
3、所述数据采集模块,用于在目标场景下采集轨迹数据,其中,所述轨迹数据由多个连续的测评点组成,所述测评点包括图像帧及其对应的跟踪位姿;
4、所述预处理模块,用于根据预设筛选规则,从所述轨迹数据中筛选满足预设条件的目标轨迹数据;
5、所述真值制作模块,用于将所述目标轨迹数据注册至视觉定位地图,得到所述测评点对应的位姿真值;
6、所述测评模块,用于获取各个测评点在所述点云地图中对应的定位结果,通过对比相同测评点的定位结果和位姿真值,得到所述点云地图的定位能力测评结果。
7、在其中一些实施例中,所述真值制作模块包括:轨迹注册模块、真值筛选模块和真值输出模块,其中,
8、所述轨迹注册模块用于,将所述目标轨迹数据中连续的多帧测评点,注册至所述点云地图,得到各个评测点对应在所述点云地图中的位姿真值,
9、所述真值筛选模块用于,在所述目标轨迹数据注册完成之后,删除所述位姿真值中注册失败和注册质量不佳的测评点,得到筛选之后的位姿真实;
10、所述真值输出模块用于,将所述筛选之后的位姿真值,合并为真值数据包并发送至所述评测模块。
11、在其中一些实施例中,所述轨迹注册模块包括第一注册模块、第二注册模块和第三注册模块,其中,
12、所述第一注册模块,用于获取各个测评点之间的关联信息,结合所述关联信息,将所述目标轨迹数据中连续的测评点注册至所述所述点云地图,得到各个测评点在所述点云地图中的位姿真值;
13、所述第二注册模块,用于将所述目标轨迹数据中的各个测评点独立注册至所述点云地图之后,对所述注册完成的测评点进行ba优化,得到各个测评点在所述点云地图中的位姿真值;
14、所述第三注册模块,用于根据所述点云地图和所述目标轨迹数据,构建因子图优化问题,
15、通过求解所述因子图优化问题,得到所述目标轨迹数据与点云地图坐标系之间的转换关系,根据所述转换关系,得到各个测评点在所述点云地图中的位姿真值。
16、在其中一些实施例中,所述真值筛选模块,通过比较相邻测评点的第一相对位姿和第二相对位姿,查找所述注册质量不佳的测评点,
17、其中,所述第一相对位姿是跟踪系统坐标系下相邻测评点的相对位姿,所述第二相对位姿是点云地图坐标系下相邻测评点的相对位姿。
18、在其中一些实施例中,所述数据采集模块包括:路线设计模块、采样点选取模块和获取模块,其中,
19、所述路线设计模块,用于获取ar内容在目标场景下的分布信息,根据所述分布信息生成对应的采样路线,其中,所述采集路线包括:环绕式路线、导览式路线和漫游式路线;
20、所述采样点选取模块,用于根据预设时间,和/或ar体验移动距离,和/或ar体验角度变换量确定带采样的测评点;
21、所述获取模块,用于根据所述采样路线,在所述目标场景中获取所述轨迹数据。
22、在其中一些实施例中,所述轨迹数据包括:采集时间、采集设备、跟踪系统信息、各个测评点对应的时间戳和辅助传感器信息。
23、在其中一些实施例中,所述跟踪系统信息包括:跟踪算法类型、跟踪状态和跟踪位姿的不确定度。
24、在其中一些实施例中,所述预处理模块包括:图像质量评估模块、运动状态评估模块、跟踪状态评估模块和轨迹评估模块,其中,
25、所述图像质量评估模块,用于获取所述轨迹数据中各个测评点的图像属性信息,根据所述图像属性信息,筛选出图像模糊度小于预设模糊度阈值且图像亮度大于预设亮度阈值的第一目标测评点;
26、运动状态评估模块,用于根据所述跟踪系统信息,从所述第一目标测评点中筛选出跟踪状态正常的第二目标测评点;
27、所述轨迹评估模块用于,基于预设轨迹检测规则,判断所述第二目标测评点组成的轨迹,是否存在断裂点,
28、若是,删除所述断裂点,并将所述断裂点之前和之后的轨迹数据分别保存为独立的两套轨迹数据,以及,获取当前所有轨迹数据中,轨迹长度大于预设位移阈值的轨迹数据,将其保存为所述目标轨迹数据。
29、在其中一些实施例中,所述测评模块包括:定位服务模块、定位数据记录模块和精度测评模块,其中,
30、所述定位服务模块,用于根据所述点云地图处理用户终端发送的定位请求,并返回对应的定位结果;
31、所述定位数据记录模块,用于记录累计的定位数据集,其中,所述定位数据集包括:定位请求以及与该定位请求对应的关联信息和定位结果;
32、所述精度测评模块,用于获取所述真值制作模块输出的各个测评点的位姿真值,以及获取所述定位数据记录模块输出的定位数据集,通过比对同一个测评点对应的位姿真值和定位结果,得到该测评点的定位差值,
33、基于当前定位数据集中,所有测评点的定位差值,输出所述点云地图的定位评估结果。
34、在其中一些实施例中,所述评测模块还用于,根据所述评估结果,对所述点云地图的定位能力配置评价指标,其中,所述评价指标包括:适用场景指标、成功率指标和定位歧义性指标。
35、在其中一些实施例中,所述适用场景指标,用于指示与所述点云地图的定位精度适配的目标应用场景;
36、所述成功率指标,用于指示所述点云地图与所述目标场景下的适配度;
37、所述定位歧义指标,用于指示所述点云地图中,定位错误的概率大于预设概率阈值的歧义区域。
38、第二方面,本技术实施例提供了一种点云地图定位能力测评方法,所述方法包括:
39、通过数据采集模块,在目标场景下采集轨迹数据,其中,所述轨迹数据由多个连续的测评点组成,其中,所述测评点包括图像帧及其对应的跟踪位姿;
40、通过预处理模块,根据预设筛选规则,从所述轨迹数据中筛选满足预设条件的目标轨迹数据;
41、通过真值制作模块,将所述目标轨迹数据注册至视觉定位地图,得到所述测评点对应的位姿真值;
42、通过测评模块,获取各个测评点在所述点云地图中对应的定位结果,通过对比相同测评点的定位结果和位姿真值,得到所述点云地图的定位能力测评结果。
43、第三方面,本技术实施例提供了一种计算机设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第二方面所述的方法。
44、第四方面,本技术实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述第二方面所述的方法。
45、相比于相关技术,本技术实施例提供的点云地图定位能力测评系统,通过数据采集模块在目标场景下采集轨迹数据;通过预处理模块对轨迹数据进行筛选得到目标轨迹数据;通过真值制作模块将目标轨迹数据注册至视觉定位地图,得到测评点对应的位姿真值;最后,通过测评模块获取各个测评点在点云地图中对应的定位结果,通过对比相同测评点的定位结果和位姿真值,得到点云地图的定位能力测评结果。相比较于现有依赖于实体标定物的、对环境要求较高的真值获取方式,通过本系统,可以不受实际场景的限制,方便、快捷的获取用于参照的位姿真值,进而通过将该位姿真值与定位结果做对比,可以对点云地图的定位精度进行全面、精准的评测。
- 还没有人留言评论。精彩留言会获得点赞!