一种智能建筑测绘方法与流程
本发明涉及建筑测绘,具体为一种智能建筑测绘方法。
背景技术:
1、绘仪器是为测绘作业设计制造的数据采集、处理、输出等仪器和装置,在工程建设中规划设计、施工及经营管理阶段进行测量工作所需用的各种定向、测距、测角、测高、测图以及摄影测量等方面的仪器,在建筑工程设计规划的过程中,需要用到测绘仪来测量所需的数据。
2、现有技术中,公开号为cn105627992a的专利文件公开了一种快速高精度非接触测绘古建筑的方法,上述测绘方法有效集成了三维激光扫描、三维光栅扫描、高分辨率相机结合建模软件测绘等现代测量手段,以非接触的方式实现古建筑表面轮廓、局部细节、残损部分或遮挡部分,以及高空部分或遮挡部分的精细数字化测绘,能有效、全面地获取古建筑三维空间数据,速度快且精度高,满足古建筑三维重建需求,但是上述装置在测绘时不便于测绘结构的快速转换及测绘装置空间测绘位置的自动切换,因而测绘时的自动化程度和功能性较低,基于此,本发明提供了一种智能建筑测绘方法以解决上述背景技术中提出的问题。
技术实现思路
1、本发明针对现有技术中存在的技术问题,提供一种智能建筑测绘方法来解决现有测绘装置测绘时的自动化程度和功能性较低的问题。
2、本发明解决上述技术问题的技术方案如下:一种智能建筑测绘方法,包括以下步骤:
3、ss001、将支撑机构布设于建筑墙体的指定测量地点,布设后,摆臂组件依据中控主机的设定以设定参数驱动三维光栅扫描仪沿设定测绘轨迹运动,三维光栅扫描仪以设定轨迹运动后,继而获取建筑表面轮廓的点云数据和全景影像,从而构筑测绘建筑的三维模型,建筑三维模型建立后,结合建筑工法和建筑模数修建筑表面轮廓的尺寸和形状;
4、ss002、利用三维光栅扫描仪进一步获取建筑局部细节的精细点云数据,根据材料特征,结合建筑工法及历史年代建筑特点修正建筑局部细节的尺寸和形状;
5、ss003、利用激光测距仪测取ss001步骤中建筑三维模型中某一指定建筑结构部件的实际距离参数,同时依据上述距离参数建立测绘坐标系的基准测绘参数;
6、ss004、利用超声波测厚仪测取建筑墙体或建筑结构的厚度参数、利用墙体探测仪探取墙内的金属物或管线分布参数;
7、ss005、将上述步骤测得的数据进行整理,并将ss001步骤中的三维模型置于空间坐标系中,并用ss003步骤中获取的基准测绘参数和ss001步骤中的三维模型以分别测得三维模型中其它各个部分或结构部件的具体实际参数,ss004步骤中所获取的数据作为参数备注或参数补充;
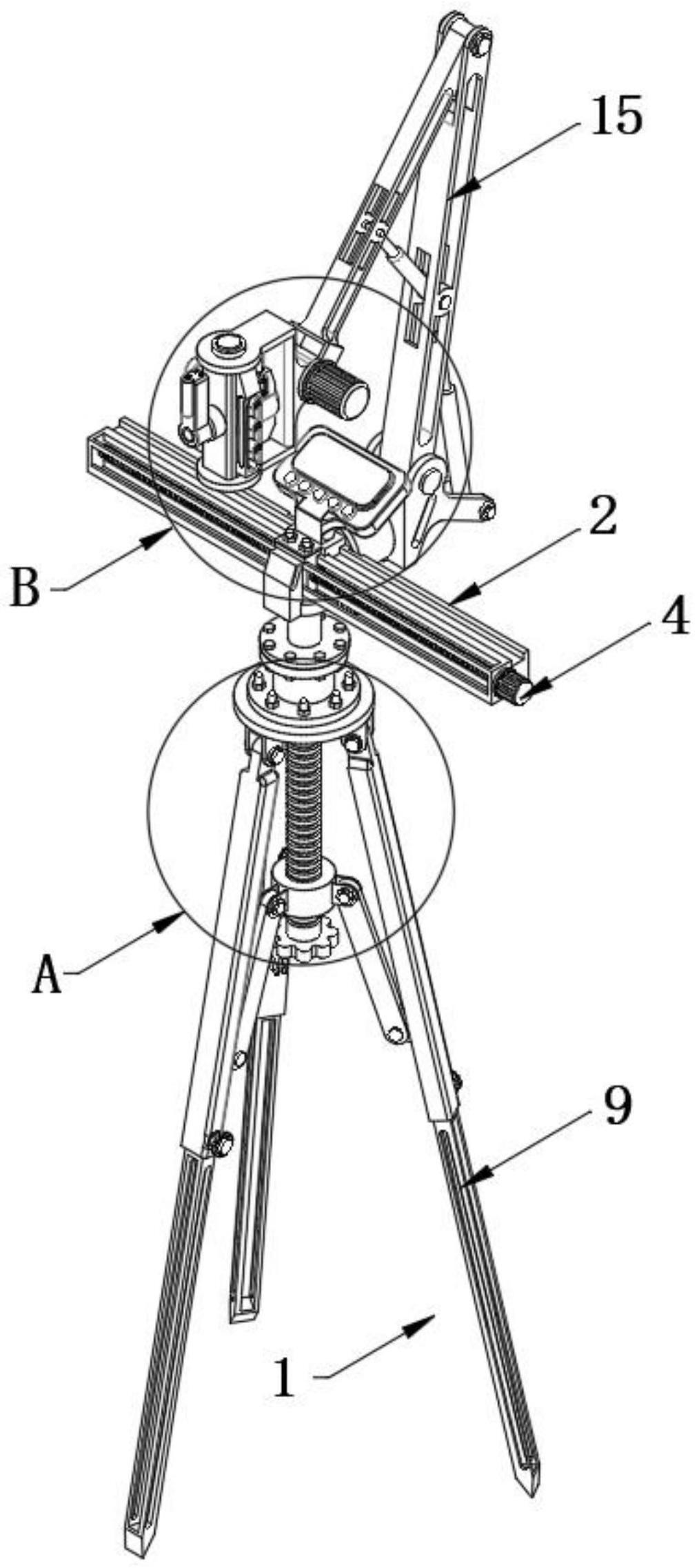
8、所述支撑机构的顶面安装有轨架,所述轨架的内壁滑动连接有移动座,所述轨架的内部安装有丝杆驱动模块,所述丝杆驱动模块的周侧面与移动座传动连接,所述移动座的表面与摆臂组件固定连接,所述摆臂组件的端部安装有测绘组件。
9、本发明的有益效果是:
10、1)通过测绘组件、轨架和支撑机构的设置,使本装置能够完成建筑的自动测绘作业,且本装置在测绘作业时,通过摆架组件和轨架的结构设置,能够快速改变测绘组件的空间测绘位置、空间测绘角度和空间测绘轨迹,通过上述技术效果的实现,一方面能够有效提高本装置的测绘精度和测绘准度,另一方面能够有效提高本装置测绘时的自动化程度。
11、2)通过转位旋台的旋转式结构设置,便于在测绘作业时快速改变测绘组件的测绘功能和测绘角度,通过上述测绘功能和测绘角度快速切换功能的实现,从而有效提高本测绘装置的多功能性,通过上述多测绘功能的实现,从而有效提高本测绘装置在测绘时的参数全面性。
12、在上述技术方案的基础上,本发明还可以做如下改进。
13、进一步,所述支撑机构包括支撑座,所述支撑座的底面转动连接有调节螺杆,所述调节螺杆的周侧面螺纹连接有驱动环,所述支撑座的底面铰接有一组呈圆周阵列分布的伸缩撑脚,每个所述伸缩撑脚与驱动环的相对表面之间均铰接有连杆,所述支撑座的顶面固定安装有电动旋转台,所述电动旋转台的顶面与轨架固定连接。
14、采用上述进一步方案的有益效果是,未使用状态下,通过对调节螺杆的控制,使三个伸缩撑脚充分收拢并聚合为一体,继而便于支撑机构的快速收纳和运输,当需要进行使用时,通过对三个伸缩撑脚伸缩幅度的调节,以调节测绘组件的布设高度,同时通过对三个伸缩撑脚伸缩程度的分别调节,以使支撑座在测绘作业时保持为水平状态,继而提高本装置的测量精度。
15、进一步,所述摆臂组件包括固定于移动座表面的定位座,所述定位座的内壁转动连接有旋轴,所述定位座的周侧面固定安装有旋转电机,所述旋转电机的输出轴端与旋轴传动连接,所述旋轴的端部固定安装有旋座,所述旋座的内壁铰接有第一摆臂,所述第一摆臂的内壁铰接有第二摆臂,所述第一摆臂与旋座的相对表面之间及所述第二摆臂与第一摆臂的相对表面之间均铰接有调角推杆,所述第二摆臂的表面与测绘组件连接。
16、所述旋轴的轴线与轨架的延伸方向垂直,所述旋轴的周侧面固定安装有从动锥齿轮,所述旋转电机的输出轴端固定安装有与从动锥齿轮啮合的主动锥齿轮。
17、采用上述进一步方案的有益效果是,使用时,通过旋转电机与旋轴的啮合连接设置,能够有效改变旋座的布设角度,通过旋座布设角度的改变,从而有效改变摆臂组件的工作朝向;
18、通过双调角推杆的设置,则能够快速改变测绘组件的空间测绘位置和空间测绘角度,通过上述测绘组件空间测绘位置和空间测绘角度的可调,从而能够有效条调本测绘装置的作业灵活性;
19、进一步,所述测绘组件分别包括转动连接于第二摆臂端部的转角架、固定于第二摆臂侧面的转角电机和固定于移动座顶面的中控主机,所述转角电机的输出轴端与转角架固定连接,所述转角架的内壁转动连接有转位旋台,所述转角架的顶面固定安装有转换电机,所述转换电机的输出轴端与转位旋台固定连接,所述转位旋台的周侧面固定设置有四个呈圆周阵列分布的安装面,所述三维光栅扫描仪、激光测距仪、超声波测厚仪和墙体探测仪分别固定于转位旋台的四个安装面上,所述三维光栅扫描仪、激光测距仪、超声波测厚仪和墙体探测仪的数据端口均与中控主机电连接。
20、采用上述进一步方案的有益效果是,使用时,通过转角电机的设置,能够快速改变转角架的布设角度,通过转换电机的设置,则能够快速改变三维光栅扫描仪、激光测距仪、超声波测厚仪和墙体探测仪的工作朝向,通过三维光栅扫描仪、激光测距仪、超声波测厚仪和墙体探测仪工作朝向的改变,继而改变本测绘组件的测绘功能;
21、使用时,三维光栅扫描仪用于对建筑结构进行三维建模、三维成像,并获取建筑表面的精细点云数据;
22、激光测距仪设置的作用在于测量某一指定建筑结构的实际测量参数,继而在三维建模时建立参数标准;
23、超声波测厚仪设置的作用在于测量某一指定建筑结构的结构厚度;
24、墙体探测仪设置的作用在于测量建筑墙体内的钢筋或管线分布情况。
25、所述转位旋台的旋转轴线与转角架的旋转轴线垂直,所述转角架为“u”状结构。
26、进一步,所述丝杆驱动模块分别包括驱动电机和传动丝杆,所述驱动电机的一表面与轨架固定连接,所述传动丝杆的两端均与轨架转动连接,所述驱动电机的输出轴端与传动丝杆固定连接,所述传动丝杆的周侧面与移动座传动连接。
27、进一步,所述轨架的内部开设有两个对称设置且与移动座滑动配合的轨槽,所述移动座的内壁固定安装有两个对称设置且与轨槽滑动配合的导向块,所述轨架的延伸方向与电动旋转台的旋转轴线垂直。
- 还没有人留言评论。精彩留言会获得点赞!