两轮车骑行监测方法、装置及可读存储介质与流程
本技术实施例涉及信息处理,尤其涉及两轮车骑行监测方法、装置及可读存储介质和电子设备。
背景技术:
1、随着两轮电动自行车新国标的出台,骑行速度被严格限制,安全骑行越来越成为保证骑行人员生命安全的关键词。近年来,随着城乡居民生活条件的不断改善,燃油、电动两轮车因其价格便宜、操作简单、轻便快捷的特点,成为许多居民通勤出行的主要交通工具。但由于两轮车驾驶人对安全骑行的重视程度不同,加上两轮车稳定性差、保护性弱,骑行摩托车超员、超速、逆行、随意穿插、打伞等各类交通违法行为极易导致发生交通事故,存在较大的安全隐患,同时也为家庭和社会带来了许多矛盾和不稳定因素。
2、现有安全骑行的主要方案是使用软件降速、佩戴头盔、增加adas(advanceddriving assistance system,高级驾驶辅助系统)防撞系统等,前两者为常规方案,后者广泛应用于汽车,成本大多较高,在两轮车上应用较少。
技术实现思路
1、本技术实施例提出两轮车骑行监测方法、装置及可读存储介质、电子设备和计算机程序产品,以实现对两轮车骑行环境的自动监测,提高两轮车骑行的安全性,并降低两轮车安全骑行的成本。
2、本技术实施例的技术方案是这样实现的:
3、一种两轮车骑行监测方法,该方法包括:
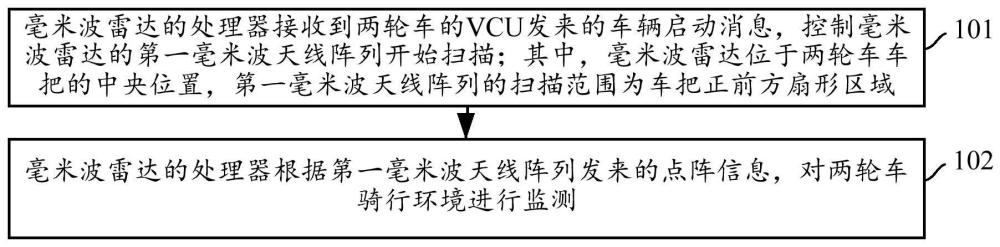
4、毫米波雷达的处理器接收到两轮车的整车控制单元vcu发来的车辆启动消息,控制毫米波雷达的第一毫米波天线阵列开始扫描;其中,毫米波雷达位于两轮车车把的中央位置,第一毫米波天线阵列的扫描范围为车把正前方扇形区域;
5、毫米波雷达的处理器根据第一毫米波天线阵列发来的点阵信息,对两轮车骑行环境进行监测。
6、所述毫米波雷达的处理器接收到两轮车的vcu发来的车辆启动消息之后、所述控制毫米波雷达的第一毫米波天线阵列开始扫描之前,进一步包括:
7、毫米波雷达的处理器控制毫米波雷达的第二毫米波天线阵列开始扫描,接收第二毫米波天线阵列发来的点阵信息,若从该点阵信息中检测出人体骨架信息,则确定骑行人员到位,向两轮车的vcu获取车辆速度,若车辆速度大于预设速度阈值,则确定两轮车开始进入骑行状态;其中,第二毫米波天线阵列的扫描范围为车把正后方扇形区域;
8、且,所述控制毫米波雷达的第一毫米波天线阵列开始扫描,包括:
9、控制毫米波雷达的第一毫米波天线阵列和第二毫米波天线阵列轮流扫描;
10、且,毫米波雷达的处理器根据第二毫米波天线阵列发来的点阵信息,对两轮车骑行人员的生物状态进行监测。
11、所述根据第一毫米波天线阵列发来的点阵信息,对两轮车骑行环境进行监测,包括:
12、毫米波雷达的处理器根据第一毫米波天线阵列发来的点阵信息进行目标检测,若检测到目标,则从所述点阵信息中解析出目标的当前位置,根据目标的当前位置确定目标是否对两轮车构成危险,若是,则进行告警。
13、当所述毫米波雷达采用机械扫描方式时,所述从所述点阵信息中解析出目标的当前位置,包括:
14、从所述点阵信息中解析出第一毫米波天线阵列的当前扫描方向信息,并根据从两轮车车把上的陀螺仪获取的两轮车车把的当前方向信息,对所述当前扫描方向信息进行校准,根据校准后的当前扫描方向信息确定目标的当前位置。
15、所述根据目标的当前位置确定目标是否对两轮车构成危险,包括:
16、根据目标的当前位置确定目标当前所在的车道,若目标当前所在的车道与两轮车当前所在的车道相同,则根据目标的当前位置和目标的前一时刻位置,确定目标的运动方向,判断目标的运动方向是否与两轮车的运动方向相反,若是,则进行告警。
17、所述进行告警,包括:
18、实时根据第一毫米波天线阵列发来的点阵信息确定目标与两轮车之间的实时距离,并根据实时距离越小告警越频繁的原则,发出告警。
19、所述毫米波雷达的处理器根据第二毫米波天线阵列发来的点阵信息,对两轮车骑行人员的生物状态进行监测,包括:
20、毫米波雷达的处理器从第二毫米波天线阵列发来的点阵信息中解析出骑行人员的呼吸频率或/和心率,根据呼吸频率或/和心率判断骑行人员的生物状态是否异常,若异常,则进行预设的紧急处理;
21、或/和,从第二毫米波天线阵列发来的点阵信息中解析出骑行人员的人体骨架信息,根据骑行人员的人体骨架信息判断当前是否为双人骑行,若是,则进行告警。
22、一种两轮车骑行监测装置,该装置包括:毫米波雷达,毫米波雷达位于两轮车车把的中央位置,毫米波雷达包括:处理器和第一毫米波天线阵列,第一毫米波天线阵列的扫描范围为车把正前方扇形区域,其中:
23、处理器,用于当接收到两轮车的整车控制单元vcu发来的车辆启动消息时,控制第一毫米波天线阵列开始扫描;根据第一毫米波天线阵列发来的点阵信息,对两轮车骑行环境进行监测;
24、第一毫米波天线阵列,用于在启动后,扫描两轮车车把正前方扇形区域,并将扫描获得的点阵信息上报给处理器。
25、所述毫米波雷达进一步包括:第二毫米波天线阵列,第二毫米波天线阵列的扫描范围为车把正后方扇形区域,
26、且,所述装置进一步包括:射频开关,射频开关的第一触点连接处理器,第二、第三触点分别连接第一毫米波天线阵列和第二毫米波天线阵列,其中:
27、所述处理器接收到两轮车的vcu发来的车辆启动消息之后、所述控制第一毫米波天线阵列开始扫描之前,进一步包括:
28、通过射频开关控制第二毫米波天线阵列开始扫描,接收第二毫米波天线阵列发来的点阵信息,若从该点阵信息中检测出人体骨架信息,则确定骑行人员到位,向两轮车的vcu获取车辆速度,若车辆速度大于预设速度阈值,则确定两轮车开始进入骑行状态;
29、且,所述处理器控制第一毫米波天线阵列开始扫描,包括:
30、通过射频开关控制第一毫米波天线阵列和第二毫米波天线阵列轮流扫描;
31、且,所述处理器进一步用于,根据第二毫米波天线阵列发来的点阵信息,对两轮车骑行人员的生物状态进行监测;
32、射频开关,用于在处理器的控制下,接通第一触点和第二触点,以使得第一毫米波天线阵列开始扫描,或者,在处理器的控制下,接通第一触点和第三触点,以使得第二毫米波天线阵列开始扫描。
33、当所述毫米波雷达采用机械扫描方式时,所述装置进一步包括:陀螺仪,所述陀螺仪位于两轮车车把上,用于测量两轮车车把的方向;
34、且,所述处理器根据第一毫米波天线阵列发来的点阵信息,对两轮车骑行环境进行监测,包括:
35、根据第一毫米波天线阵列发来的点阵信息进行目标检测,若检测到目标,则从所述点阵信息中解析出第一毫米波天线阵列的当前扫描方向信息,并根据从陀螺仪获取的两轮车车把的当前方向信息,对所述当前扫描方向信息进行校准,根据校准后的当前扫描方向信息确定目标的当前位置,根据目标的当前位置确定目标是否对两轮车构成危险,若是,则进行告警。
36、所述处理器根据第二毫米波天线阵列发来的点阵信息,对两轮车骑行人员的生物状态进行监测,包括:
37、从第二毫米波天线阵列发来的点阵信息中解析出骑行人员的呼吸频率或/和心率,根据呼吸频率或/和心率判断骑行人员的生物状态是否异常,若异常,则进行预设的紧急处理;
38、或/和,从第二毫米波天线阵列发来的点阵信息中解析出骑行人员的人体骨架信息,根据骑行人员的人体骨架信息判断当前是否为双人骑行,若是,则进行告警。
39、一种非瞬时计算机可读存储介质,所述非瞬时计算机可读存储介质存储指令,所述指令在由处理器执行时使得所述处理器执行如上任一项所述的两轮车骑行监测方法的步骤。
40、一种电子设备,包括如上所述的非瞬时计算机可读存储介质、以及可访问所述非瞬时计算机可读存储介质的所述处理器。
41、本技术实施例通过在两轮车车把上设置毫米波雷达,且第一毫米波天线阵列的扫描范围为车把正前方扇形区域,实现了在两轮车骑行过程中对骑行环境的自动监测,提高了两轮车骑行的安全性,并降低了两轮车安全骑行的成本。
- 还没有人留言评论。精彩留言会获得点赞!