雷达目标角度测量方法、装置及存储介质与流程
本发明涉及雷达检测,尤其涉及一种雷达目标角度测量方法、装置及存储介质。
背景技术:
1、mimo雷达是指多发多收天线体制的雷达,提供了经济有效的方式来提高雷达的分辨率,且天线体积较小。基于多阵元天线,mimo雷达采用m个通道发射相互正交的信号,多波形信号在空间保持独立,经过目标的散射,被n个接收阵元接收,每个阵元都采用m个匹配滤波器对回波进行匹配,从而可以得到m*n个通道的回波数据。
2、在探测目标时,毫米波雷达能通过脉冲信号分辨移动目标的速度、数量和方向,且不受光线和天气的影响,在多种应用场景中发挥着不可替代的作用。毫米波雷达对目标进标定时,向待测物体发射脉冲信号,获取待测物体上的多个检测点反射回来的回波信号,雷达系统对回波信号进行数据处理,实现对待测物体的角度位置标定。
3、当前4d毫米波雷达在对方位角度进行位置估计时,由于天线通道总数量有限,且一部分天线通道需要用于俯仰角度的位置估计,导致在对方位角度进行位置估计时,难以通过有限的天线保证方位角度位置的评估精度和稳健性。因此,现有技术中存在天线通道数量有限的情况下难以同时保障俯仰角度位置和方位角度位置的测量精度的技术问题。
技术实现思路
1、本发明提供了一种雷达目标角度测量方法、装置及存储介质,旨在有效解决现有技术中天线通道数量有限,难以同时保障俯仰角度位置和方位角度位置的测量精度的技术问题。
2、根据本发明的一方面,本发明提供一种雷达目标角度测量方法,用于mimo雷达,所述mimo雷达具有多个发射天线和多个接收天线,所述方法包括:
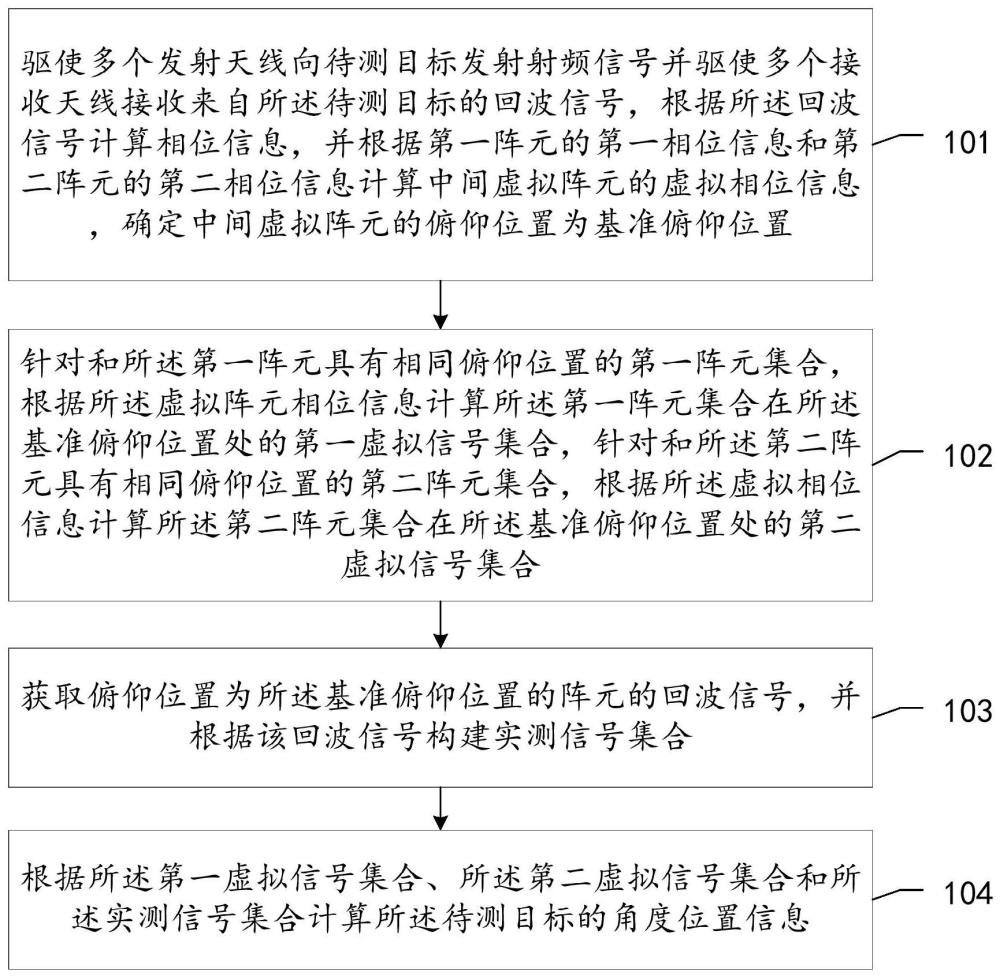
3、驱使所述多个发射天线向待测目标发射射频信号并驱使所述多个接收天线接收来自所述待测目标的回波信号,根据所述回波信号计算相位信息,并根据第一阵元的第一相位信息和第二阵元的第二相位信息计算中间虚拟阵元的虚拟相位信息,确定中间虚拟阵元的俯仰位置为基准俯仰位置;
4、针对和所述第一阵元具有相同俯仰位置的第一阵元集合,根据所述虚拟相位信息计算所述第一阵元集合在所述基准俯仰位置处的第一虚拟信号集合,针对和所述第二阵元具有相同俯仰位置的第二阵元集合,根据所述虚拟相位信息计算所述第二阵元集合在所述基准俯仰位置处的第二虚拟信号集合;
5、获取俯仰位置为所述基准俯仰位置的阵元的回波信号,并根据该回波信号构建实测信号集合;
6、根据所述第一虚拟信号集合、所述第二虚拟信号集合和所述实测信号集合计算所述待测目标的角度位置信息。
7、进一步地,所述方法还包括:
8、在所述驱使所述多个发射天线向待测目标发射射频信号之前,对所述多个发射天线和所述多个接收天线构成的通道阵列进行阵列设计,其中,所述通道阵列至少包括第一通道阵列、第二通道阵列和第三通道阵列,所述第一通道阵列中的阵元包括所述第一阵元和所述第一阵元集合,所述第二通道阵列中的阵元包括所述第二阵元和所述第二阵元集合,所述第三通道阵列中的阵元的俯仰位置为所述基准俯仰位置。
9、进一步地,所述根据第一阵元的第一相位信息和第二阵元的第二相位信息计算中间虚拟阵元的虚拟相位信息包括:
10、根据所述第一相位信息和所述第二相位信息计算所述第一阵元和所述第二阵元之间的第一相位差;
11、根据所述第一相位信息和所述第一相位差计算所述虚拟相位信息。
12、进一步地,所述根据第一阵元的第一相位信息和第二阵元的第二相位信息计算中间虚拟阵元的虚拟相位信息包括:
13、根据下式计算所述虚拟相位信息:
14、
15、其中,zv表示所述虚拟相位信息,z1表示所述第一相位信息,表示所述第二相位信息,“*”为取共轭操作。
16、进一步地,所述针对和所述第一阵元具有相同俯仰位置的第一阵元集合,根据所述虚拟相位信息计算所述第一阵元集合在所述基准俯仰位置处的第一虚拟信号集合包括:
17、根据所述第一相位信息和所述虚拟相位信息计算所述第一阵元和所述中间虚拟阵元之间的第一虚拟相位差;
18、针对所述第一阵元集合中的阵元,根据该阵元的相位信息和所述第一虚拟相位差计算该阵元在所述基准俯仰位置处的虚拟相位;
19、基于所述第一阵元集合中的阵元对应的虚拟相位构建所述第一阵元集合;
20、所述针对和所述第二阵元具有相同俯仰位置的第二阵元集合,根据所述虚拟相位信息计算所述第二阵元集合在所述基准俯仰位置处的第二虚拟信号集合包括:
21、根据所述第二相位信息和所述虚拟相位信息计算所述第二阵元和所述中间虚拟阵元之间的第二虚拟相位差;
22、针对所述第二阵元集合中的阵元,根据该阵元的相位信息和所述第二虚拟相位差计算该阵元在所述基准俯仰位置处的虚拟相位;
23、基于所述第二阵元集合中的阵元对应的虚拟相位构建所述第二阵元集合。
24、进一步地,所述根据所述第一虚拟信号集合、所述第二虚拟信号集合和所述实测信号集合计算所述待测目标的角度位置信息包括:
25、基于所述第一虚拟信号集合、所述第二虚拟信号集合和所述实测信号集合生成方位阵列信号集合;
26、对所述方位阵列信号集合进行傅里叶变换以得到方位角度谱,根据所述方位角度谱中的最高方位角度峰值确定所述待测目标的目标方位角度。
27、进一步地,所述方法还包括:
28、在所述对所述方位阵列信号集合进行傅里叶变换以得到方位角度谱之前,根据数字波束合成方法对所述方位阵列信号集合进行方位角度位置补偿,以得到三元俯仰阵列信号集合。
29、进一步地,所述根据所述第一虚拟信号集合、所述第二虚拟信号集合和所述实测信号集合计算所述待测目标的角度位置信息包括:
30、对所述三元俯仰阵列信号集合进行傅里叶变换以得到俯仰角度谱,根据所述俯仰角度谱中的最高俯仰角度峰值确定所述待测目标的目标俯仰角度。
31、根据本发明的另一方面,本发明还提供了一种雷达目标角度测量装置,用于mimo雷达,所述mimo雷达具有多个发射天线和多个接收天线,所述装置包括:
32、虚拟相位信息计算模块,用于驱使所述多个发射天线向待测目标发射射频信号并驱使所述多个接收天线接收来自所述待测目标的回波信号,根据所述回波信号计算相位信息,并根据第一阵元的第一相位信息和第二阵元的第二相位信息计算中间虚拟阵元的虚拟相位信息,确定中间虚拟阵元的俯仰位置为基准俯仰位置;
33、虚拟信号集合计算模块,用于针对和所述第一阵元具有相同俯仰位置的第一阵元集合,根据所述虚拟相位信息计算所述第一阵元集合在所述基准俯仰位置处的第一虚拟信号集合,针对和所述第二阵元具有相同俯仰位置的第二阵元集合,根据所述虚拟相位信息计算所述第二阵元集合在所述基准俯仰位置处的第二虚拟信号集合;
34、实测信号集合构建模块,用于获取俯仰位置为所述基准俯仰位置的阵元的回波信号,并根据该回波信号构建实测信号集合;
35、方位角度位置计算模块,用于根据所述第一虚拟信号集合、所述第二虚拟信号集合和所述实测信号集合计算所述待测目标的角度位置信息。
36、根据本发明的另一方面,本发明还提供了一种存储介质,所述存储介质中存储有多条指令,所述指令适于由处理器加载以执行如上所述的任一雷达目标角度测量方法。
37、通过本发明中的上述实施例中的一个实施例或多个实施例,至少可以实现如下技术效果:
38、在本发明所公开的技术方案中,根据两个阵元构造两者中间的虚拟阵元,然后通过虚拟阵元对其它俯仰位置相同的阵元进行补偿,得到具有相同俯仰位置的多个虚拟阵元,最后通过虚拟阵元和真实阵元计算目标方位角度位置和俯仰角度位置。通过对齐的俯仰测量阵元相位补偿,可增加方位测量阵列的等效阵元数量,在物理口径不变的情况下提升阵列的稳健性,同时保留了阵列的俯仰角度测量能力。
39、通过本方案,当目标幅度与干扰谱幅度相差较大时,在真实场景下能够获得更稳健的目标角度位置估计能力。若出现噪声或其它目标干扰,能够防止抬高干扰谱的幅度,精确得到目标角度位置,较普通目标角度位置估计方法,本方案具备更高的检测精度和稳健性。
- 还没有人留言评论。精彩留言会获得点赞!