一种三频精密单点定位测速方法、系统、计算机设备和可读存储介质与流程
本技术涉及一种三频精密单点定位测速方法、系统、计算机设备和可读存储介质,属于gnss pppve。
背景技术:
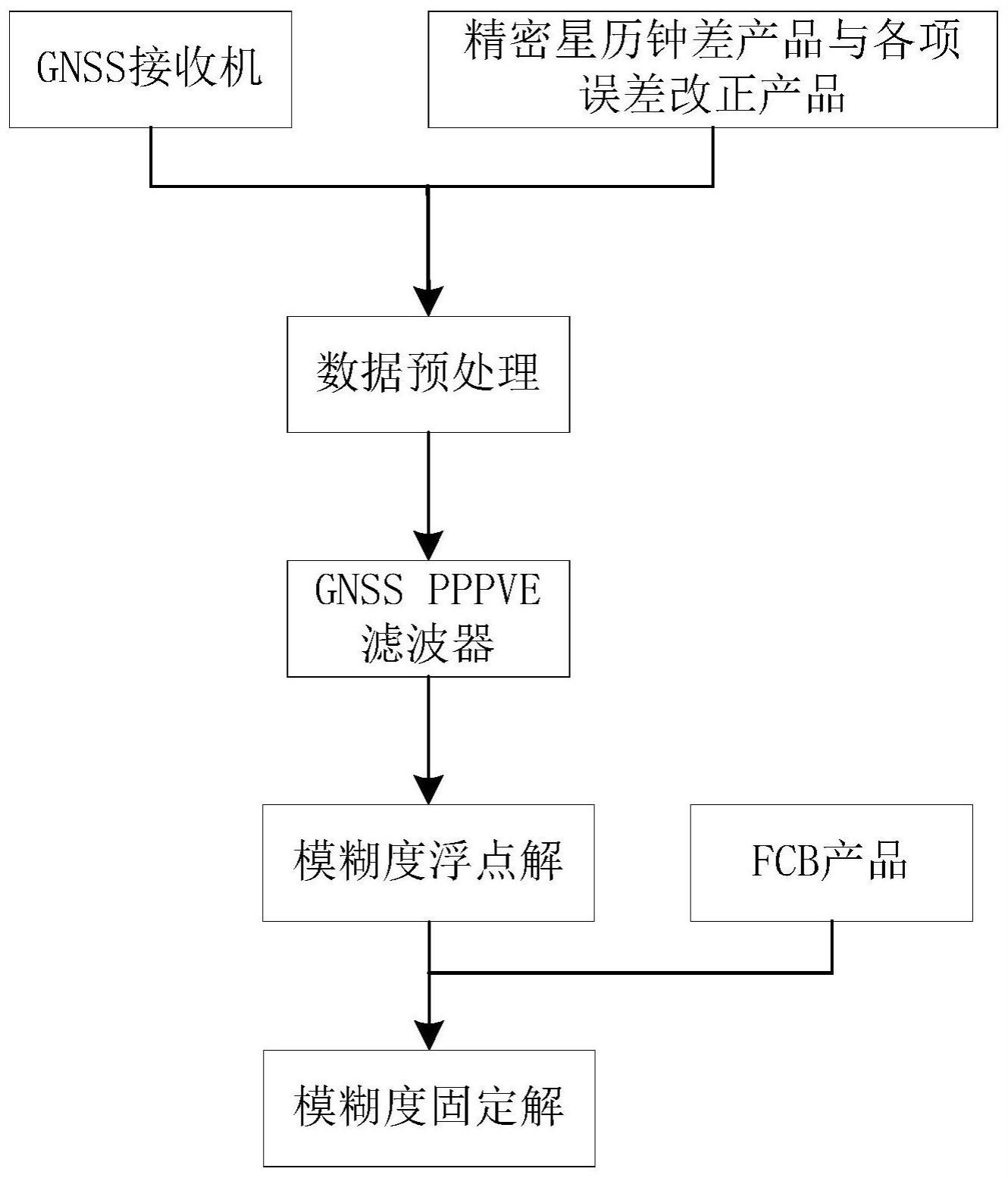
1、全球导航卫星系统(global navigation satellite system,gnss)精密单点定位(precise point positioning,ppp)技术依靠外部提供的精密轨道、钟差与偏差改正产品即可实现单台接收机的厘米级高精度精密定位,不受距离、区域的限制,已在科研、商业应用等广泛应用。ppp模糊度固定(ambiguity resolution,pppar)可以提高定位精度、缩短收敛时间,这些优点进一步拓展了ppp的应用。速度是运动物体的重要特征,gnss测速可以不依赖基准站进行精密单点测速(ppp velocity estimation,pppve),pppve是基于二阶高斯马尔可夫过程,在ppp滤波中增加速度和加速度参数估计速度的方法,进而可以使得用户在得到位置的同时可以得到高精度的速度和加速度信息。获得快速收敛的高精度三维速度和三维加速度的固定解是目前亟待解决的问题。
2、pppve通常采用kalman滤波进行参数估计,现在越来越多的导航卫星开始播发三频及以上频率信号,多频数据有助于提高收敛速度以及快速固定模糊度,但是准确的函数模型和随机模型是获得高精度参数解的前提,三频(triple-frequency,tf)pppve是目前的热点和难点问题。
3、基于上述情况,特提出本技术。
技术实现思路
1、本技术的目的在于提供一种三频精密单点定位测速方法、系统、计算机设备和可读存储介质,其通过先构建合适的gnss tf-pppve滤波模型以及模糊度固定解,再构建了tf-pppve观测模型及其随机模型,实现可获得tf-pppve浮点解和固定解。
2、为达到上述目的,本技术公开如下技术方案:
3、第一方面,本技术提供一种三频精密单点定位测速方法,所述三频精密单点定位测速方法tf-pppve包括以下步骤:
4、s1、构建pppve观测方程和pppve状态方程,并将所述pppve观测方程和pppve状态方程进行线性化;
5、s2、获取所述gnss三频观测值,基于所述gnss三频观测值,通过if1213模型构建tf-pppve模型和tf-pppve随机模型;
6、s3、构建gnss ppp宽巷组合观测值,并进行外部约束的差分码偏差和小数偏差改正;
7、s4、通过多次中间过程,首先构建星间单差宽巷模糊度方程,通过gnss ppp精密定位模糊度整数解产品,恢复宽巷模糊度整周特性,再通过星间单差宽巷模糊度和单差浮点if模糊度获得浮点单差窄巷模糊度;
8、s5、利用lambda算法计算单差窄巷模糊度固定解,最后通过最小二乘约束得到pppve固定解;
9、s6、根据所述单差窄巷模糊度固定解估计其它卫星的模糊度固定解,获得pppve结果。
10、在一些可能的实施方式中,步骤s1中,所述pppve观测方程为:
11、
12、其中,和分别为伪距和载波相位的无电离层组合观测量减去计算量;
13、为方向余弦,即从接收机r至卫星s的三维单位向量,x为接收机位置的坐标增量;
14、v和a分别为接收机三维速度和三维加速度;
15、c为光在真空中的传播速度,为接收机钟差;
16、mr为湿对流层投影函数,zwdr为接收机天顶对流层湿延迟;
17、为相位硬件偏差时变部分,将被伪距残差吸收,由于其量级相比伪距残差很小,所以对伪距残差的影响可以忽略不计;
18、和分别为伪距和载波相位的观测噪声、多路径效应及其他为模型化的误差之和;
19、λif为无电离层组合载波波长,为无电离层组合模糊度。
20、在一些可能的实施方式中,步骤s1中,所述pppve状态方程为:
21、xk=φk,k-1×xk-1+ωk-1
22、
23、
24、其中,x为状态参数向量,φ为状态转移矩阵;
25、k和k-1分别为当前时刻和上一时刻;
26、ωk-1为状态噪声矩阵,qk为状态噪声的方差阵;
27、qa、qt和qt分别为加速度、接收机钟差和天顶对流层湿延迟的功率密度,e为三阶单位矩阵,且qa设置为0.1m·s-5/2。
28、在一些可能的实施方式中,步骤s2中,所述tf-pppve模型为:
29、
30、其中,ifbif13为if12和if13之间的频间偏差,为if12和if13之间的频间钟差,月将提前被改正;
31、所述tf-pppve模型的待估参数为:
32、
33、在一些可能的实施方式中,步骤s2中,所述tf-pppve随机模型基于以下方法进行构建:假设不同频率观测值之间相互独立,且不同频率伪距或载波相位观测值噪声相同,即满足和式中σp/l=α/sin(e),其中α为观测值噪声,对于载波相位观测值,一般经验地取0.003m;而对于伪距观测值,一般取0.3m;e为卫星高度角。
34、具体的,根据误差传播定律,tf-pppve随机模型为:
35、
36、
37、其中,∑if1213为确立的tf-pppve的随机模型,α和β分别为无电离层组合因子;f为载波相位频率,i,j=1,2,3;(i≠j)为频率编号。
38、在一些可能的实施方式中,步骤s4中,具体包括:利用gnss ppp精密定位模糊度整数解产品,对宽巷组合观测值以及原始观测值进行改正,恢复其整周特性。采用逐级求解的方式,选取各gnss内高度角最大的一颗卫星,作为参考基准星,进行系统内星间单差。利用非差浮点解计算if模糊度,通过分系统星间单差构建单差宽巷模糊度,使用宽巷小数偏差产品固定宽巷模糊度;通过星间单差浮点if模糊度和星间单差宽巷模糊度得到浮点单差窄巷模糊度。
39、在一些可能的实施方式中,步骤s5中,所述通过最小二乘约束得到pppve固定解,具体形式如下:
40、
41、
42、其中,x表示除固定模糊度之外的参数,为未固定的模糊度,δx为对应参数的固定解。
43、第二方面,本技术提供一种三频精密单点定位测速系统,其用于实现第一方面所述的三频精密单点定位测速方法。
44、在一些可能的实施方式中,所述三频精密单点定位测速系统包括:
45、第一模块,用于构建pppve观测方程和pppve状态方程,并将所述pppve观测方程和pppve状态方程进行线性化;
46、第二模块,用于获取所述gnss三频观测值,基于所述gnss三频观测值,通过if1213模型构建tf-pppve模型和tf-pppve随机模型;
47、第三模块,用于构建gnss ppp宽巷组合观测值,并进行外部约束的差分码偏差和小数偏差改正;
48、第四模块,用于通过多次中间过程,首先构建星间单差宽巷模糊度方程,通过gnssppp精密定位模糊度整数解产品,恢复宽巷模糊度整周特性,再通过星间单差宽巷模糊度和单差浮点if模糊度获得浮点单差窄巷模糊度;
49、第五模块,用于利用lambda算法计算单差窄巷模糊度固定解,最后通过最小二乘约束得到pppve固定解;
50、第六模块,用于根据所述单差窄巷模糊度固定解估计其它卫星的模糊度固定解,获得pppve结果。
51、第三方面,本技术提供一种计算机设备,其包括:处理器和存储器,所述存储器用于存储程序,所述处理器用于从存储器中调用并运行所述程序以执行第一方面所述的三频精密单点定位测速方法。
52、第四方面,本技术提供一种计算机可读存储介质,其包括计算机程序,当所述计算机程序在计算机上运行时,使得所述计算机执行第一方面所述的三频精密单点定位测速方法。
53、与现有技术相比,本发明具有以下优点:
54、1)基于现有多系统多频卫星数据的特点,构建了高精度tf-pppve观测模型和随机模型;
55、2)利用三频卫星数据,以载波相位观测值为基准获取pppve浮点解;
56、3)为了降低gnss ppp模糊度固定的要求,通过三频gnss观测值构建宽巷、窄巷组合,并考虑卫星硬件延迟的差分码偏差、小数偏差改正,去系统误差部分便于模糊度取整固定;
57、4)选取各gnss内高度角最大的一颗卫星,作为参考基准星,进行系统内星间单差。利用非差浮点解计算if模糊度,通过分系统星间单差构建单差宽巷模糊度,使用宽巷小数偏差产品固定宽巷模糊度;通过星间单差浮点if模糊度和星间单差宽巷模糊度得到浮点单差窄巷模糊度;使用lambda算法固定窄巷单差模糊度;基于此再通过最小二乘约束获得pppve固定解;;
58、5)利用已固定的观测历元模糊度估计出gnss接收机pppve,得到其他观测历元模糊度参数直接取整固定;
59、6)解算过程中,将固定解和浮点解分开解算,固定解的值不作为下一历元浮点解求解的初值,对下一历元的运算没有影响,可以有效避免模糊度固定错误带来的结果发散。
60、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
- 还没有人留言评论。精彩留言会获得点赞!