基于软件定义无线电USRP平台的目标距离估计的方法
本发明涉及雷达测距,特别是涉及基于软件定义无线电usrp平台的目标距离估计的方法。
背景技术:
1、雷达测距技术是一种广泛应用于航空、航海、气象、军事等领域的距离测量技术。其基本原理是利用电磁波在空气中的传播特性,通过发送一定频率的电磁波并接收其反射信号,来计算目标物体与雷达设备的距离。
2、雷达测距技术的基础是电磁波理论,其工作原理与光学测距类似。雷达设备发射一个高频电磁波脉冲,当这个波遇到一个目标时,会被反射回来。雷达设备接收到这个反射波并计算出反射波的时间延迟,即可计算出目标与雷达设备之间的距离。
3、为了提高雷达测距技术的精度和可靠性,现有技术中采用了例如调频连续波雷达、脉冲压缩雷达、相控阵雷达等技术提高雷达的分辨率和灵敏度,同时也减少雷达测量过程中的噪声和干扰。
4、usrp是在主机cpu上使用gnu radio完成所有波形相关方面的处理,比如调制和解调。gnu radio是一个开源的软件定义无线电(sdr)平台。sdr(software defined radio)是一种无线通信技术,通过使用软件和硬件结合的方式,实现对无线电信号的灵活控制和处理。与传统无线电通信技术相比,sdr可以实现更广泛的频率范围、更高的带宽和更多的通信协议的支持。
5、sdr的基本原理是将无线电信号转换为数字信号,然后通过计算机软件进行数字信号处理和调制。这样可以实现对信号的灵活控制,例如调整频率、带宽、调制方式等参数,而无需更改硬件设备。这种灵活性使得sdr在许多应用中非常有用,包括军事通信、卫星通信、广播、无线电测量等。
6、sdr系统通常包括一个硬件前端和一个数字信号处理器。硬件前端用于接收无线电信号并将其转换为数字信号,通常包括一个接收天线、一个射频前置放大器、一个射频转换器和一个模数转换器。数字信号处理器则用于对数字信号进行处理和调制,通常使用计算机软件来实现。
7、sdr通过利用外围无线软件技术usrp,已经降低了硬件的复杂性和成本。但现有技术中将usrp应用到调频连续波雷达技术的研究未见报道。
技术实现思路
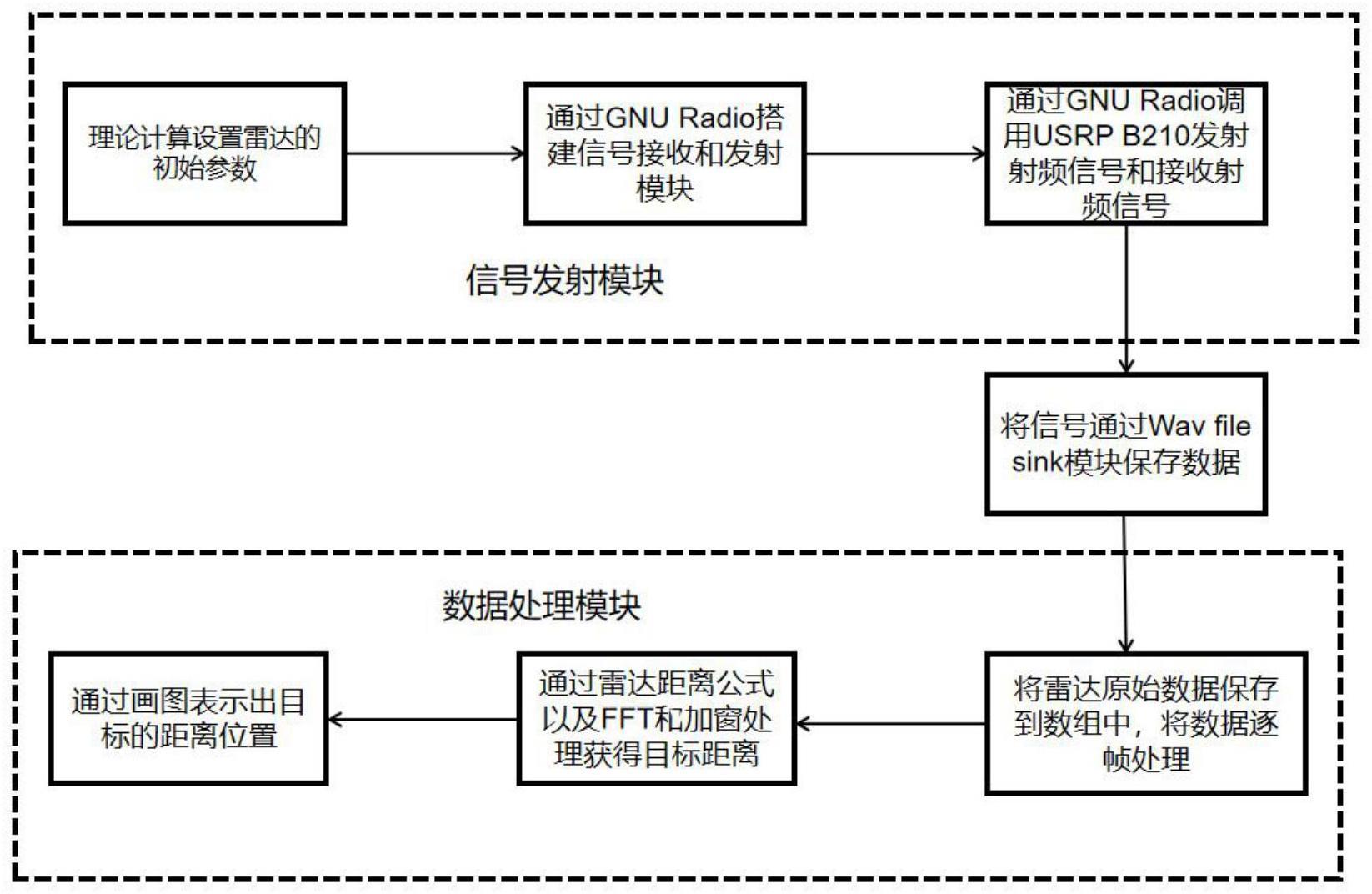
1、本发明的目的是提供基于软件定义无线电usrp平台的目标距离估计的方法,采用gnu radio、usrp b210和python等开源硬件和软件,实现了一种调频连续波fmcw雷达在3.3ghz的频率下估计发射机与目标物体之间的距离。利用python进行信号处理,实现了目标反射的原始信号处理,并在频谱图上给出了距离估计。
2、为实现上述目的,本发明提供了基于软件定义无线电usrp平台的目标距离估计的方法,包括以下步骤:
3、s1通过gnu radio搭建信号发射模块,使用usrp的rx2/a天线发射射频信号,将射频信号传送到目标处;
4、s2通过gnu radio搭建信号接收模块和数据保存模块,通过usrp的tx/rx a天线接收回波信号,并保存数据;
5、s3接收到的信号数据通过python中的scipy和numpy库进行数据预处理;
6、s4预处理之后的信号通过距离测量原理进行距离计算;
7、s5计算得到的数据通过matplotlib就行画图绘制,得到测量距离。
8、优选的,s1步骤的具体处理过程如下:
9、s11搭建信号发射模块中所使用的信号为调频信号,在简化形式下,传输的公式如下:
10、
11、
12、其中kr表示调制速率,t0表示调制周期的一半,b表示chirp信号的带宽,j表示虚数单位,t表示调制周期,st表示发射信号;
13、回波信号和发射信号相比延迟了δt的时间,回波信号的公式为:
14、
15、其中,δt为延迟时间,r为发射机和目标之间的距离,c为光速;通过测量接收信号与发射信号的频率之差fb确定发射机与目标之间的距离;在调制带宽,调制周期之间形成以下公式的关系,即发射信号的速率频率和延迟时间的关系:
16、
17、
18、将上述两式带入后得到以下公式:
19、
20、距离分辨率δr为:
21、
22、其是指两个物体之间能被区分为不同物体的最小距离;
23、s12通过gnu radio中的signal source模块搭建信号发生器;
24、进一步的,由于所用的雷达信号为fwcm(调频连续波)并且使用的信号波形为三角波,故该模块的具体参数设置如下:
25、将采样频率(sample rate)设置为6m赫兹,波形形状(waveform)设置为三角波(triangle),信号频率(frequency)设置为250,振幅(amplitude)设置为1,其他参数均为默认即可;
26、s13使用压控振荡器控制信号的频率和幅值:
27、进一步的,在gnu radio中压控振荡器(vco)的参数设置如下:采样频率(samplerate)设置为6m赫兹,振幅(amplitude)设置为1,其他参数均为默认即可;
28、s14通过s12、s13两步,信号由signal source模块发出,通过压控振荡器将信号发送至usrp信号发射模块;
29、进一步的,对于通过连接到usrp b210的tx天线传输到无线介质,需要发送一个实信号和虚信号,为此过程使用uhd:usrp sink块,uhd:usrp sink将样本流式传输到usrp硬件当中,并通过rx2/a天线发射到无线介质中;
30、再进一步的,uhd:usrp sink参数设置如下,采样频率(sample rate)设置为6m赫兹,中心频率(centerfreq)设置为3.33g,信号增益(gainvalue)设置为60,天线(antenna)设置为tx/rx,其他参数均为默认即可。
31、优选的,s2步骤的具体处理过程如下:
32、s21使用uhd:usrp source模块将反射回的信号通过天线tx/rx a进行接收;
33、进一步的,uhd:usrp source模块参数设置如下,采样频率(sample rate)设置为6m赫兹,中心频率(centerfreq)设置为3.33g,信号增益(gainvalue)设置为60,天线(antenna)设置为rx2,其他参数均为默认即可;
34、s22将uhd:usrp source模块接收到的回波信号与信号发生器产生的信号相乘;在gnu radio中提供了信号相乘模块multiply其作用便为将两信号相乘;
35、s23得到相乘信号后将复数信号通过complex to real模块将复数信号转化为实数信号;
36、s24最后将实信号传输到信号保存模块wave file sink,将信号保存为dout_file.dat文件中,然后用python进行处理。
37、优选的,s3步骤的具体处理过程如下:
38、s31通过numpy库中的fromfile函数将步骤s24中的out_file文件进行读取,并将数据存储到矩阵中并且通过getsize函数获取文件大小;
39、s32将整个数据文件分为20帧,并读取其中的一帧数据,然后将一帧数据通过reshape函数将数据包存储方式拆分成8列,通过savetxt函数将文件存储为txt文件;
40、s33一发一收下将一根天线一帧数据放置到data_radar数组下,通过转置以及数据的裁剪将矩阵变为256行128列。
41、优选的,s4步骤的具体处理过程如下:
42、s41由于信号有一定的频谱泄漏故需要进行加窗处理,将经过信号预处理获得信号进行加窗处理,使用的窗函数为汉宁窗即hanning函数,汉宁窗数学表达式如下:
43、
44、s42通过加窗操作后将获得的信号进行fft快速傅里叶变换;
45、s43将经过fft的信号取对数后,进行归一化处理和取平均处理,将数据保存到数组中。
46、优选的,s5步骤的具体处理过程如下:
47、s51通过matplotlib中的plot函数将s4中的数据进行可视化处理,横坐标为距离单位为米,纵坐标为回波信号强度;
48、s52通过matplotlib中的scatter和annotate函数将信号峰值和峰值所对应的距离值标记在图中。
49、因此,本发明采用上述一种基于软件定义无线电usrp平台的目标距离估计的方法,通过gnu radio和python进行射频信号的发射与接收再通过gnu radio中的数据保存模块,将雷达原始数据通过out_file.dat文件进行保存,然后将雷达原始信号用python进行处理,通过数据裁剪以及数据逐帧分析后,将数据保存到指定数组中,并通过加窗处理以及fft处理后获得了目标与usrp之间的距离估计。
50、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!