基于时频分析的太赫兹视频合成孔径雷达动目标成像方法
本技术涉及信号处理,特别是涉及一种基于时频分析的太赫兹视频合成孔径雷达动目标成像方法、装置、计算机设备和存储介质。
背景技术:
1、合成孔径雷达的提出是为了对静止场景进行高分辨成像,但在目标跟踪和交通监测中,运动目标的成像十分重要。合成孔径雷达运动目标成像技术可以在复杂的环境下快速监测到运动目标的运动方向和地理位置。因此,将视频合成孔径雷达与运动目标成像技术相结合就可以对运动目标进行持续的监测。但是运动目标成像的难点也是总所周知的:两个方向速度的存在导致了运动目标成像结果会出现偏移和散焦。
2、然而,目前现有的运动目标成像技术中,速度估计的方法大多比较繁琐和费时,而且还有大量的公式推导,速度估计效率慢。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够快速实现运动目标的速度估计和图像重聚焦的基于时频分析的太赫兹视频合成孔径雷达动目标成像方法、装置、计算机设备和存储介质。
2、一种基于时频分析的太赫兹视频合成孔径雷达动目标成像方法,方法包括:
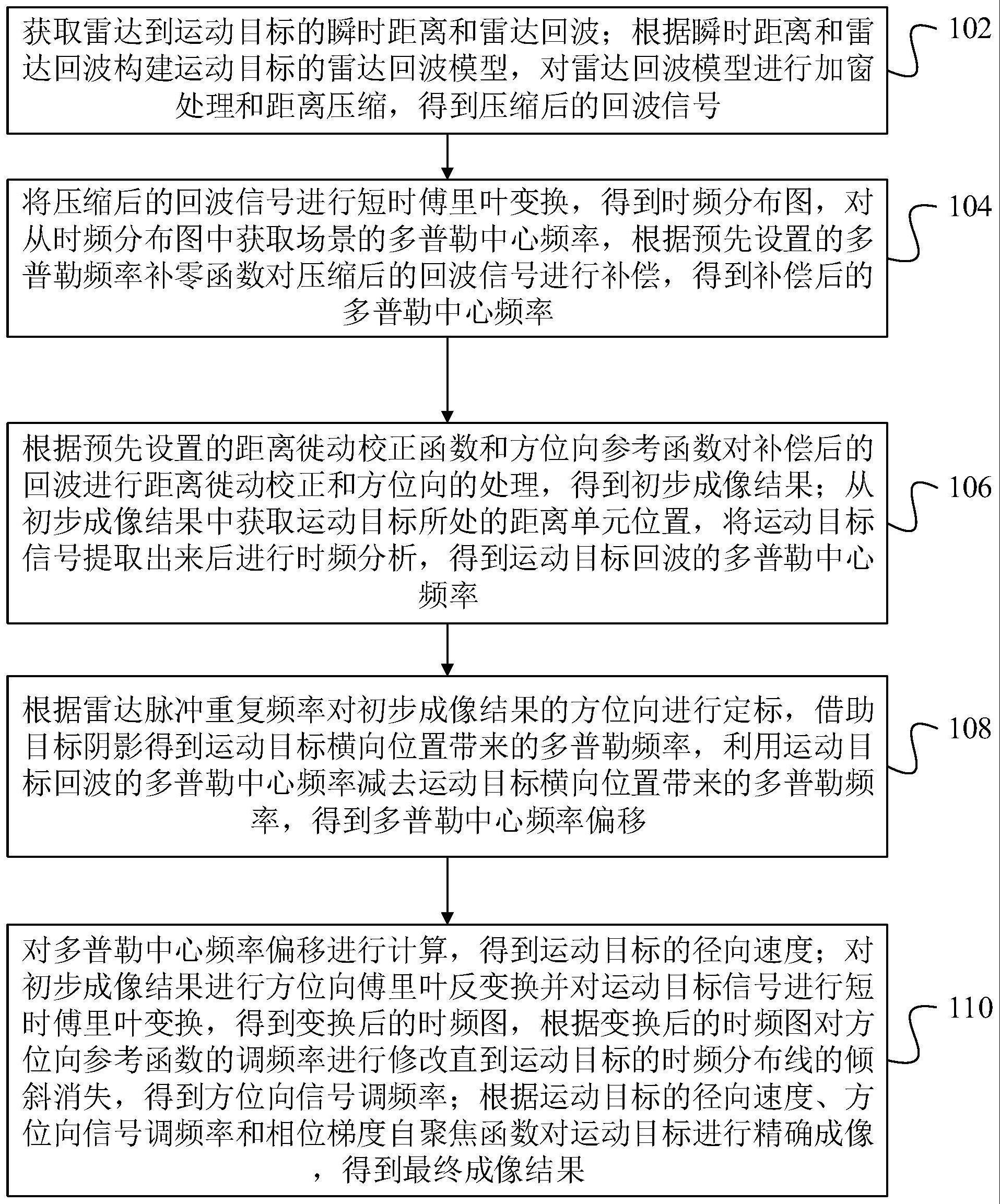
3、获取雷达到运动目标的瞬时距离和雷达回波;
4、根据瞬时距离和雷达回波构建运动目标的雷达回波模型,对雷达回波模型进行加窗处理和距离压缩,得到压缩后的回波信号;
5、将压缩后的回波信号进行短时傅里叶变换,得到时频分布图,对从时频分布图中获取整个场景回波的多普勒中心频率,根据预先设置的多普勒频率补零函数对压缩后的回波信号进行补偿,得到补偿后的回波;
6、根据预先设置的距离徙动校正函数和方位向参考函数对补偿后的回波进行距离徙动校正和方位向的处理,得到初步成像结果;
7、从初步成像结果中获取运动目标所处的距离单元位置,将运动目标信号提取出来后进行时频分析,得到运动目标回波的多普勒中心频率;
8、根据雷达脉冲重复频率对初步成像结果的方位向进行定标,借助目标阴影得到运动目标横向位置带来的多普勒频率,利用运动目标回波的多普勒中心频率减去运动目标横向位置带来的多普勒频率,得到多普勒中心频率偏移;
9、对多普勒中心频率偏移进行计算,得到运动目标的径向速度;
10、对初步成像结果进行方位向傅里叶反变换并对运动目标信号进行短时傅里叶变换,得到变换后的时频图,根据变换后的时频图对方位向参考函数的调频率进行修改直到运动目标的时频分布线的倾斜消失,得到方位向信号调频率;
11、根据运动目标的径向速度、方位向信号调频率和相位梯度自聚焦函数对运动目标进行精确成像,得到最终成像结果。
12、在其中一个实施例中,根据瞬时距离和雷达回波构建运动目标的雷达回波模型,包括:
13、根据瞬时距离和雷达回波构建运动目标的雷达回波模型为
14、
15、其中,r(tm)为瞬时距离,rect()表示窗函数,exp表示e为底的指数函数,j表示虚数单位,t为距离快时间,tp为雷达脉冲宽度,fc为雷达中心频率,λ为雷达波长,kr为距离向调频率,tm是方位慢时间,ta为合成孔径时间,c为光速。
16、在其中一个实施例中,对雷达回波模型进行加窗处理和距离压缩,得到压缩后的回波信号,包括:
17、根据汉宁窗对雷达回波模型进行加窗处理,得到加窗后的回波信号;
18、对加窗后的回波信号进行距离向傅里叶变换,得到压缩后的回波信号。
19、在其中一个实施例中,预先设置的多普勒频率补零函数为exp(-j2πfdctm),其中fdc为场景回波的多普勒中心频率。
20、在其中一个实施例中,预先设置的距离徙动校正函数为exp(-j4πfrvsinθtm/c),fr为距离频率,v是雷达平台速度,θ为雷达斜视角。
21、在其中一个实施例中,预先设置的方位向参考函数为ka为信号方位向调频率。
22、在其中一个实施例中,对多普勒中心频率偏移进行计算,得到运动目标的径向速度,包括:
23、对多普勒中心频率偏移进行计算,得到运动目标的径向速度为
24、vr=λfshift/-2
25、其中,fshift为多普勒中心频率偏移。
26、一种基于时频分析的太赫兹视频合成孔径雷达动目标成像装置,所述装置包括:
27、雷达回波模型构建和处理模块,用于获取雷达到运动目标的瞬时距离和雷达回波;根据瞬时距离和雷达回波构建运动目标的雷达回波模型,对雷达回波模型进行加窗处理和距离压缩,得到压缩后的回波信号;
28、回波信号补偿模块,用于将压缩后的回波信号进行短时傅里叶变换,得到时频分布图,对从时频分布图中获取整个场景回波的多普勒中心频率,根据预先设置的多普勒频率补零函数对压缩后的回波信号进行补偿,得到补偿后的回波;
29、时频分析模块,用于根据预先设置的距离徙动校正函数和方位向参考函数对补偿后的回波进行距离徙动校正和方位向的处理,得到初步成像结果;从初步成像结果中获取运动目标所处的距离单元位置,将运动目标信号提取出来后进行时频分析,得到运动目标回波的多普勒中心频率;
30、多普勒中心频率偏移计算模块,用于根据雷达脉冲重复频率对初步成像结果的方位向进行定标,借助目标阴影得到运动目标横向位置带来的多普勒频率,利用运动目标回波的多普勒中心频率减去运动目标横向位置带来的多普勒频率,得到多普勒中心频率偏移;
31、成像模块,用于对多普勒中心频率偏移进行计算,得到运动目标的径向速度;对初步成像结果进行方位向傅里叶反变换并对运动目标信号进行短时傅里叶变换,得到变换后的时频图,根据变换后的时频图对方位向参考函数的调频率进行修改直到运动目标的时频分布线的倾斜消失,得到方位向信号调频率;根据运动目标的径向速度、方位向信号调频率和相位梯度自聚焦函数对运动目标进行精确成像,得到最终成像结果。
32、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
33、获取雷达到运动目标的瞬时距离和雷达回波;
34、根据瞬时距离和雷达回波构建运动目标的雷达回波模型,对雷达回波模型进行加窗处理和距离压缩,得到压缩后的回波信号;
35、将压缩后的回波信号进行短时傅里叶变换,得到时频分布图,对从时频分布图中获取整个场景回波的多普勒中心频率,根据预先设置的多普勒频率补零函数对压缩后的回波信号进行补偿,得到补偿后的回波;
36、根据预先设置的距离徙动校正函数和方位向参考函数对补偿后的回波进行距离徙动校正和方位向的处理,得到初步成像结果;
37、从初步成像结果中获取运动目标所处的距离单元位置,将运动目标信号提取出来后进行时频分析,得到运动目标回波的多普勒中心频率;
38、根据雷达脉冲重复频率对初步成像结果的方位向进行定标,借助目标阴影得到运动目标横向位置带来的多普勒频率,利用运动目标回波的多普勒中心频率减去运动目标横向位置带来的多普勒频率,得到多普勒中心频率偏移;
39、对多普勒中心频率偏移进行计算,得到运动目标的径向速度;
40、对初步成像结果进行方位向傅里叶反变换并对运动目标信号进行短时傅里叶变换,得到变换后的时频图,根据变换后的时频图对方位向参考函数的调频率进行修改直到运动目标的时频分布线的倾斜消失,得到方位向信号调频率;
41、根据运动目标的径向速度、方位向信号调频率和相位梯度自聚焦函数对运动目标进行精确成像,得到最终成像结果。
42、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
43、获取雷达到运动目标的瞬时距离和雷达回波;
44、根据瞬时距离和雷达回波构建运动目标的雷达回波模型,对雷达回波模型进行加窗处理和距离压缩,得到压缩后的回波信号;
45、将压缩后的回波信号进行短时傅里叶变换,得到时频分布图,对从时频分布图中获取整个场景回波的多普勒中心频率,根据预先设置的多普勒频率补零函数对压缩后的回波信号进行补偿,得到补偿后的回波;
46、根据预先设置的距离徙动校正函数和方位向参考函数对补偿后的回波进行距离徙动校正和方位向的处理,得到初步成像结果;
47、从初步成像结果中获取运动目标所处的距离单元位置,将运动目标信号提取出来后进行时频分析,得到运动目标回波的多普勒中心频率;
48、根据雷达脉冲重复频率对初步成像结果的方位向进行定标,借助目标阴影得到运动目标横向位置带来的多普勒频率,利用运动目标回波的多普勒中心频率减去运动目标横向位置带来的多普勒频率,得到多普勒中心频率偏移;
49、对多普勒中心频率偏移进行计算,得到运动目标的径向速度;
50、对初步成像结果进行方位向傅里叶反变换并对运动目标信号进行短时傅里叶变换,得到变换后的时频图,根据变换后的时频图对方位向参考函数的调频率进行修改直到运动目标的时频分布线的倾斜消失,得到方位向信号调频率;
51、根据运动目标的径向速度、方位向信号调频率和相位梯度自聚焦函数对运动目标进行精确成像,得到最终成像结果。
52、上述基于时频分析的太赫兹视频合成孔径雷达动目标成像方法、装置、计算机设备和存储介质,首先获取雷达到运动目标的瞬时距离和雷达回波;根据瞬时距离和雷达回波构建运动目标的雷达回波模型,对雷达回波模型进行加窗处理和距离压缩,得到压缩后的回波信号;加窗的目的是为了抑制信号的旁瓣从而提高分辨率。将压缩后的回波信号进行短时傅里叶变换,得到时频分布图,对从时频分布图中获取场景回波的多普勒中心频率,根据预先设置的多普勒频率补零函数对压缩后的回波信号进行补偿,得到补偿后的回波;根据预先设置的距离徙动校正函数和方位向参考函数对补偿后的回波进行距离徙动校正和方位向的处理,得到初步成像结果;从初步成像结果中观察运动目标的距离单元位置,接着对运动目标信号进行抽取和时频分析,得到运动目标回波的多普勒中心频率;根据雷达脉冲重复频率对初步成像结果的方位向进行定标,借助目标阴影得到运动目标横向位置带来的多普勒频率,利用运动目标回波的多普勒中心频率减去运动目标横向位置带来的多普勒频率,得到多普勒中心频率偏移;利用多普勒中心频率偏移公式进行计算,得到运动目标的径向速度,快速实现了运动目标的速度估计,再对初步成像结果进行方位向傅里叶反变换并对运动目标信号进行短时傅里叶变换,得到变换后的时频图,根据变换后的时频图对方位向参考函数的调频率进行修改直到运动目标的时频分布线的倾斜消失,得到方位向信号调频率,通过观察运动目标回波的时频分布图来校正方位向调频率,达到了运动目标图像重聚焦的目的并且省去了参数估计的过程,最后根据运动目标的径向速度、方位向信号调频率和相位梯度自聚焦函数对运动目标进行精确成像,得到最终成像结果。本技术一方面能够快速实现运动目标的速度估计,简化估计的过程,进而实现了运动目标快速成像;另一方面对运动目标图像重聚焦时,不进行参数估计直接根据时频分布图来不断优化成像结果,既节省了时间又实现了运动目标的速度估计快速成像和图像重聚焦,仅利用时频分析就可以完成运动目标的速度估计和运动目标图像重聚焦,整个过程参数估计过程简便,成像效率高。
- 还没有人留言评论。精彩留言会获得点赞!