车间距离测量方法、车间距离测量装置、电子设备、计算机程序以及计算机可读记录介质与流程
本发明涉及利用车辆行驶中拍摄的行驶影像测量车间距离的车间距离测量方法、车间距离测量装置、电子设备、计算机程序以及计算机可读记录介质。
背景技术:
1、车辆行驶中最重要的在于安全行驶以及交通事故的预防,为此,在车辆上安装有用于执行车辆的姿势控制、车辆结构装置的功能控制的多种辅助装置以及安全带、安全气囊等安全装置。
2、不仅如此,最近还有在车辆上设置存储车辆的行驶影像以及从各种传感器传送的数据,从而在车辆发生事故时能够找出事故原因的黑匣子等装置的趋势。在智能手机、平板电脑等便携式终端也可以安装黑匣子或者导航仪应用程序等,从而可以活用为如上所述车辆用装置。
3、为此,最近开发以及普及有利用车辆行驶中拍摄的行驶影像,从而辅助车辆驾驶员的驾驶的先进驾驶辅助系统(adas:advanced driver assistance systems),从而不仅使驾驶员安全驾驶,还提高方便性。
4、在所述adas提供的功能中,前方车辆冲撞预警功能(fcws:forward collisionwarning system)是测量与车辆的行驶路线前方所处的前方车辆之间的距离,然后根据距离向驾驶员发出存在冲撞危险的提示的功能。
5、然而,根据现有的车间距离测量方法,不考虑车辆的宽度互不相同的很多车辆(例如,小型车、中型车、大型车)的实际宽度,而通过预设的特定常数值处理车宽度来测量车间距离,因此存在经测量的车间距离值不准确的问题。
6、另外,存在adas中成为判断危险的依据的测量值中的小的误差可能会在系统运行中成为大的问题,由此导致妨碍驾驶员的便利性以及稳定性的问题。作为一例,即便车辆之间的距离没有大到需要发出前方车辆冲撞预警,然而却发出预警,因此发生adas功能反而妨碍驾驶员的安全驾驶的情况。
技术实现思路
1、本发明是为了解决上述问题而提出的,其目的在于,计算前方车辆的影像宽度和前方车辆所处的车道的影像宽度之间的比例,然后基于计算的比例,在多个大小等级(例如,小型车、中型车、大型车)中判断前方车辆的大小等级。
2、另外,本发明的目的在于,基于前方车辆的大小等级决定前方车辆的宽度,并利用所决定的前方车辆的宽度,测量基准车辆和前方车辆之间的测量距离。
3、另外,本发明的目的在于,利用经测量的车间距离,提供准确的前方车辆冲撞预警功能。
4、为了达成上述目的,根据本发明的一实施例的利用处理器的车间距离测量方法,包括:获取行驶中的第一车辆的拍摄装置拍摄的行驶影像的步骤;从所述行驶影像检测第二车辆,计算所述经检测的第二车辆的影像宽度和所述第二车辆所处的车道的影像宽度之间的比例的步骤;基于所述计算的比例,决定所述第二车辆的大小等级的步骤;基于所述所决定的第二车辆的大小等级,决定第二车辆的宽度的步骤;以及基于所述所决定的第二车辆的宽度、所述拍摄装置的焦点距离以及所述第二车辆的影像宽度,计算从所述拍摄装置到所述第二车辆为止的距离的步骤。
5、然后,所述计算比例的步骤包括:在所述行驶影像中包含的多个车辆中检测作为距离测量对象的所述第二车辆的步骤;在所述行驶影像中识别所述第二车辆行驶中的车道的左侧车线和右侧车线的步骤;以及将所述经识别的左侧车线和所述经识别的右侧车线之间的影像宽度决定为所述第二车辆所处的车道的影像宽度的步骤。
6、另外,所述计算比例的步骤包括:在所述经检测的第二车辆的影像中识别所述第二车辆的左侧边界和右侧边界的步骤;以及将所述经识别的左侧边界和所述经识别的右侧边界之间的影像宽度决定为所述第二车辆的影像宽度的步骤。
7、然后,决定所述第二车辆的大小等级的步骤是基于所述计算的比例,在多个大小等级中决定所述第二车辆的大小等级,所述多个大小等级可以包括与小型车相对应的第一大小等级、与中型车相对应的第二大小等级以及与大型车相对应的第三大小等级中至少两个。
8、另外,决定所述第二车辆的大小等级的步骤可以包括:当所述计算的比例小于第一值时,将所述第二车辆的大小等级决定为所述第一大小等级的步骤;当所述计算的比例大于所述第一值而小于第二值时,将所述第二车辆的大小等级决定为所述第二大小等级的步骤;以及当所述计算的比例大于第二值时,将所述第二车辆的大小等级决定为所述第三大小等级的步骤。
9、然后,进一步包括:针对多个大小等级,分别存储车辆的宽度的步骤,决定所述第二车辆的宽度的步骤可以包括:在所述经存储的车辆的宽度中,检测与所述所决定的车辆大小等级相对应的车辆的宽度的步骤;以及将所述经检测的车辆的宽度决定为所述第二车辆的宽度的步骤。
10、另外,可以进一步包括:当所述计算的距离小于预设的距离时,生成提示数据用于提示与所述第一车辆和所述第二车辆之间的距离之差相对应的冲撞危险级别的步骤。
11、然后,当所述第一车辆行驶在所述车道上时,检测所述第二车辆的步骤可以是在所述行驶影像中包含的多个车辆中,检测与所述第一车辆位于相同车道上的所述第二车辆。
12、另外,当所述第一车辆脱离所述车道时,检测所述第二车辆的步骤可以是在所述行驶影像中包含的多个车辆中,检测位于所述第一车辆的前面所朝向的车道上的所述第二车辆。
13、然后,计算所述距离的步骤可以是基于以下数学式计算从所述拍摄装置到所述第二车辆为止的距离,
14、【数学式】
15、d=w×(f÷w)
16、所述d为从所述拍摄装置到所述第二车辆为止的距离,所述w为所述第二车辆的宽度,所述f为所述拍摄装置的焦点距离(focal length),所述w为所述第二车辆的影像宽度。
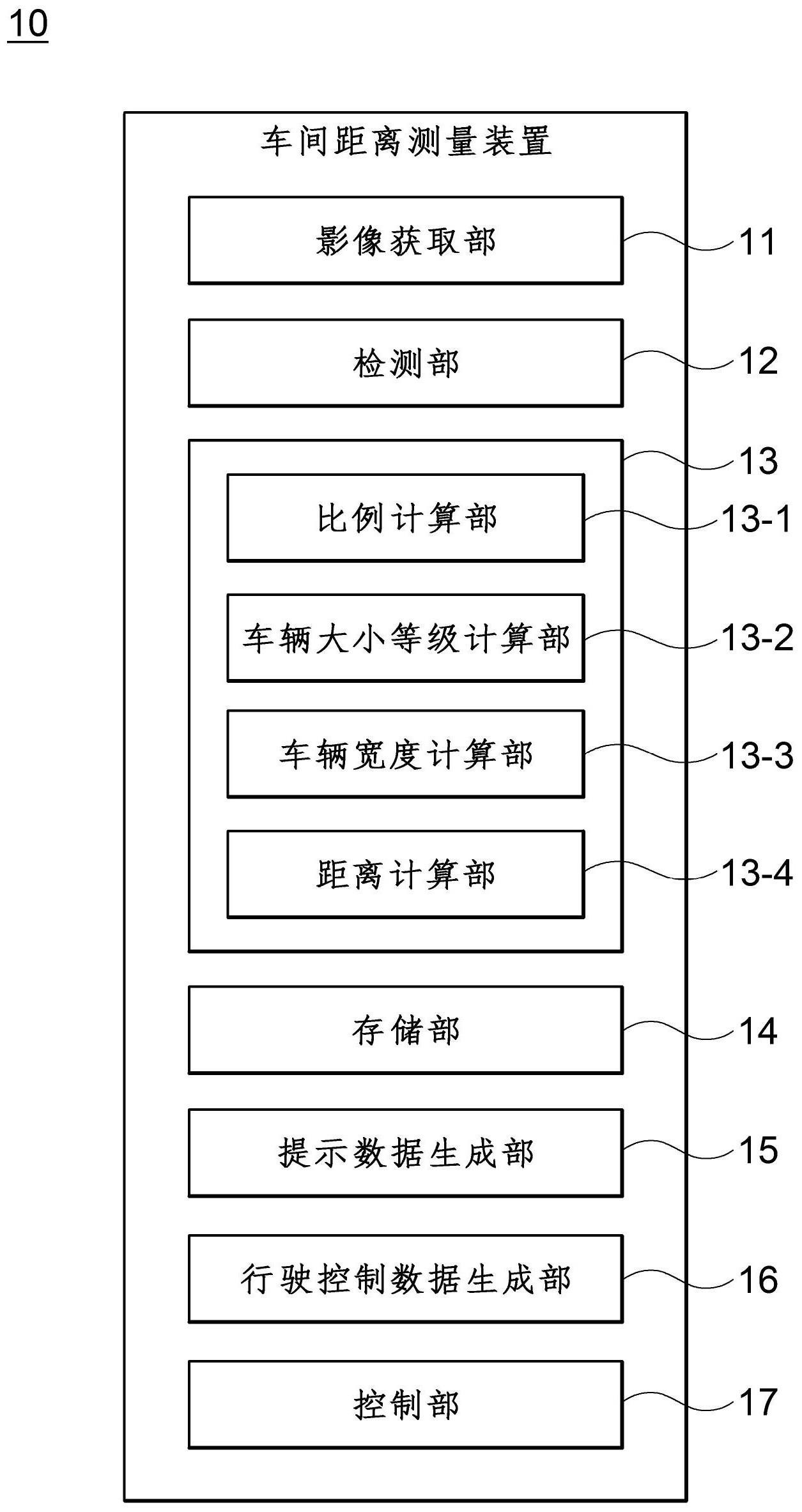
17、一方面,为了达成上述目的,根据本发明的一实施例的车间距离测量装置,包括:影像获取部,获取行驶中的第一车辆的拍摄装置拍摄的行驶影像;检测部,从所述行驶影像检测第二车辆;比例计算部,计算所述经检测的第二车辆的影像宽度和所述第二车辆所处的车道的影像宽度之间的比例;车辆大小等级计算部,基于所述计算的比例,决定所述第二车辆的大小等级;车辆宽度计算部,基于所述所决定的第二车辆的大小等级,决定第二车辆的宽度;以及距离计算部,基于所述所决定的第二车辆的宽度、所述拍摄装置的焦点距离以及所述第二车辆的影像宽度,计算从所述拍摄装置到所述第二车辆为止的距离。
18、然后,所述检测部可以在所述行驶影像中包含的多个车辆中,检测作为距离测量对象的所述第二车辆,所述比例计算部在所述行驶影像中识别所述第二车辆行驶中的车道的左侧车线和右侧车线,将所述经识别的左侧车线和所述经识别的右侧车线之间的影像宽度决定为所述第二车辆所处的车道的影像宽度。
19、另外,所述比例计算部可以在所述经检测的第二车辆的影像中识别所述第二车辆的左侧边界和右侧边界,将所述经识别的左侧边界和所述经识别的右侧边界之间的影像宽度决定为所述第二车辆的影像宽度。
20、然后,所述车辆大小等级计算部基于所述计算的比例,在多个大小等级中决定所述第二车辆的大小等级,所述多个大小等级可以包括与小型车相对应的第一大小等级、与中型车相对应的第二大小等级以及与大型车相对应的第三大小等级中至少两个。
21、另外,所述车辆大小等级计算部可以是当所述计算的比例小于第一值时,将所述第二车辆的大小等级决定为所述第一大小等级,当所述计算的比例大于所述第一值而小于第二值时,将所述第二车辆的大小等级决定为所述第二大小等级,当所述计算的比例大于第二值时,将所述第二车辆的大小等级决定为所述第三大小等级。
22、然后,进一步包括:存储部,针对多个大小等级,分别存储车辆的宽度,所述车辆大小等级计算部可以在所述经存储的车辆的宽度中,检测与所述所决定的车辆大小等级相对应的车辆的宽度。
23、另外,可以进一步包括:提示数据生成部,当所述计算的距离小于预设的距离时,生成提示数据用于提示与所述第一车辆和所述第二车辆之间的距离之差相对应的冲撞危险级别。
24、然后,所述检测部可以在所述行驶影像中包含的多个车辆中,检测与所述第一车辆位于相同车道上的所述第二车辆。
25、另外,所述检测部可以在所述行驶影像中包含的多个车辆中,检测位于所述第一车辆的前面所朝向的车道上的所述第二车辆。
26、然后,所述距离计算部可以基于以下数学式计算从所述拍摄装置到所述第二车辆为止的距离,
27、【数学式】
28、d=w×(f÷w)
29、所述d为从所述拍摄装置到所述第二车辆为止的距离,所述w为所述第二车辆的宽度,所述f为所述拍摄装置的焦点距离(focal length),所述w为所述第二车辆的影像宽度。
30、为了达成上述目的,根据本发明的一实施例的基于车间距离提供用于辅助驾驶员的提示的电子设备,包括:输出部,输出所述驾驶员可以确认的提示信息;影像获取部,获取拍摄装置拍摄的行驶影像;比例计算部,从所述行驶影像检测前方车辆,计算所述经检测的前方车辆的影像宽度和所述前方车辆所处的车道的影像宽度之间的比例;车辆大小等级计算部,基于所述计算的比例,决定所述前方车辆的大小等级;车辆宽度计算部,基于所述所决定的前方车辆的大小等级,决定所述前方车辆的车辆宽度;距离计算部,基于所述所决定的前方车辆的车辆宽度、所述拍摄装置的焦点距离以及所述前方车辆的影像宽度,计算从所述拍摄装置到所述前方车辆为止的距离;以及控制部,控制所述输出部根据所述计算的距离输出前方车辆冲撞提示。
31、然后,所述输出部进一步包括:显示部,将所述经拍摄的行驶影像与提示个体进行结合,从而输出增强现实图像,所述控制部可以控制所述显示部生成用于所述前方车辆冲撞提示的提示个体,并将所述经生成的用于前方车辆冲撞提示的提示个体与所述增强现实图像的前方车辆显示区域重叠显示。
32、一方面,为了达成上述目的,根据本发明的一实施例的计算机可读记录介质可以记录有用于执行上述车间距离测量方法的程序。
33、另外,为了达成上述目的,根据本发明的一实施例的程序可以记录有用于执行上述车间距离测量方法的代码。
34、根据上述本发明的各种实施例,计算前方车辆的大小等级,并将计算的大小等级活用为adas(先进驾驶辅助系统)提示时的输入值,从而能够改善adas的性能。
35、另外,根据上述本发明的多种实施例,通过减少基准车辆和前方车辆之间的车间距离的误差,从而能够更加准确地完成前方冲撞提示。
- 还没有人留言评论。精彩留言会获得点赞!