新能源汽车路径规划方法、系统、电子设备以及存储介质与流程
本公开涉及路径规划领域,尤其涉及一种新能源汽车路径规划方法、系统、电子设备以及存储介质。
背景技术:
1、在倡导绿色节能的大环境下汽车产业正在向智能化、新能源化、轻量化、共享化方向蓬勃发展,随着新能源汽车的普及,汽油的价格上涨,电车成为当今用户选车首选目标。当用户驾驶电动汽车出行时,用户对充电点、行驶里程和电量等综合预估不准确的,导致行驶途中车主的里程焦虑,需要到指定位置进行充电才能完成续航。而电车(ev)处于馈电状态时,导致行驶过程中电车电量不够,则无法达到目的地,从而耽误用户的时间,且电车没电后,需要聘请专门的人员将电车拉去充电点,前往充电站往往也需要等待较长的充电时间,甚至还面临充电桩全部被占用的可能,浪费了大量的人员、时间和费用开支。
2、现有的电车路径规划算法采用遗传算法、分层强化学习算法、蚁群算法、floyd搜索算法、排队论、变邻域模拟退火算法对路径进行优化,实现了较好效果,但是在实际多车交互动态,算法的实时性与响应速度仍需改善,实时性与响应速度会影响因城市功能区划分带来区域交通不均衡以及光伏发电不灵活带来的部分光储充电站能源消纳不充分的问题。
技术实现思路
1、本公开实施例提供了一种新能源汽车路径规划方法、系统、电子设备以及存储介质,解决了因城市功能区划分带来区域交通不均衡以及光伏发电不灵活带来的部分光储充电站能源消纳不充分的问题,有效避免高峰时段电车集群充电需求带来的充电站周围路段拥堵问题,局部改善路网运行状况,提高电车的充电效率的同时,保证了配电网的稳定性和安全性,提高了充电站的经济性以及适应性,大幅降低了运算时间,提高了搜索速率。
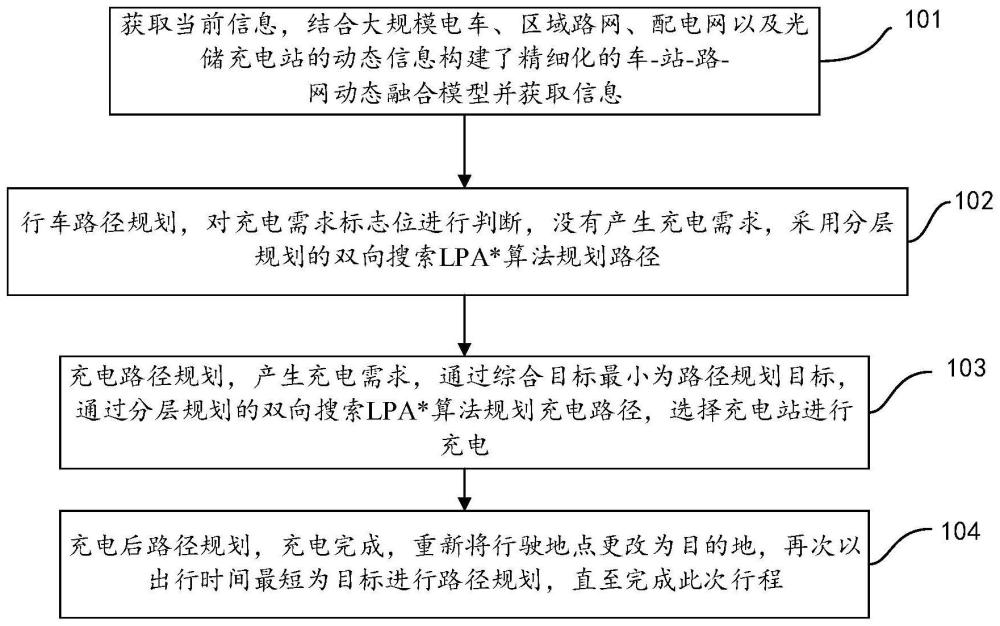
2、第一方面,本公开实施例提供了新能源汽车路径规划方法,包括:获取当前信息,结合大规模电车、区域路网、配电网以及光储充电站的动态信息构建了精细化的车-站-路-网动态融合模型并获取信息;行车路径规划,对充电需求标志位进行判断,没有产生充电需求,采用分层规划的双向搜索lpa*算法规划路径;充电路径规划,产生充电需求,通过综合目标最小为路径规划目标,通过分层规划的双向搜索lpa*算法规划充电路径,选择充电站进行充电;充电后路径规划,充电完成,重新将行驶地点更改为目的地,再次以出行时间最短为目标进行路径规划,直至完成此次行程。
3、结合第一方面的实施例,在一些实施例中,所述获取当前信息,结合大规模电车、区域路网、配电网以及光储充电站的动态信息构建了精细化的车-站-路-网动态融合模型并获取信息,包括:
4、交通路网模型cg为
5、
6、其中,r为路网cg中所有路段集合,w为时段集合,根据系统运行间隔时间将全天划分为m个时段,cg为交通路网模型是有向带权网络,h为路网cg中所有节点集合,s为道路路段的路阻系数矩阵,反映路段通行能力;
7、路段拥堵对车辆行驶时间产生影响,采用改进brp模型和改进webster模型对路段阻抗和节点阻抗进行标定为
8、
9、
10、其中,mi(t)为节点hi的阻抗,tij(t)为路段hij的阻抗,t0为理想行程时间,i为道路饱和度,δ、ε为阻抗影响参数,q为车辆到达率,c为信号周期,θ为绿信比,是交通灯一个周期内可用于车辆通行的时间比例;
11、车辆行驶时间还会受路口信号灯的控制,道路路阻包括路段路阻和节点路阻,道路路阻模型为
12、电车的能源网络模型为电网模型,其负荷设施为光储充电站,结合城市电网的实际情况,对光储充电站的负荷进行建模;
13、储能系统在t时刻的充放电模型为
14、
15、其中,λch、λdis分别为储能的充、放电效率,obat,ch、obat,dis分别为储能的充、放电功率,sbat(t)、sbat(t-1)分别为t时刻、t-1时刻储能的荷电状态,δt为采样时间间隔,mbat为储能容量;
16、光储系统为
17、峰时段优先使用光伏充电,当光伏出力不够且负荷高于节点负荷阈值的20%时,使用储能;
18、平时段光伏优先满足充电站的基础负荷,余电存储于储能,若平时段荷电状态低于20%,则除光伏外向电网购电至50%或平时段结束;
19、谷时段储能系统向大电网购电;
20、配电网节点a处的光储充电站在任一时刻的节点负荷oa为
21、oa=oev+opv+obat
22、oev为ev充电功率总和,opv为光伏板放电功率,obat为储能系统的充放电功率,当负荷充电时取正,放电时取负;
23、电车模型包括空间分布信息、电池能量状态、充电信息、车辆充电行为动态信息;
24、空间分布信息
25、对h辆电车进行编号,对每一辆电车以状态集合vev(i)(i=1,2,…,h)表示,记录每一辆电车对应起点、终点及电荷状态;
26、基于状态集合对电车充电需求进行判定
27、
28、其中,hch(i)为第i辆电车所选充电站,j为充电站编号,ce(i)为第i辆电车的充电需求标志,当车辆产生充电需求时置1,反之置0;
29、电池能量状态及充电信息,电车每行驶1km的耗电量模型vs为
30、
31、其中,v为路段实际平均速度,vs为电车行驶1km的耗电量;
32、充电电池充满时的电量范围为100-120kwh,初始时刻的剩余电量l0(i)为
33、l0(i)=[(0.5~0.8)lm(i)]
34、t时刻ev的剩余电量lt(i)为
35、
36、其中,为能效指标,lt-1为t-1时刻时ev的剩余电量,d为从t-1时刻到t时刻为止第i辆汽车行驶的路程;
37、基于车辆实时电量设置充电需求触发条件为
38、lt(i)=τllm(t)
39、lt(i)≤arvs
40、其中,τv为电池电荷状态,ar为当前ev距离目的地的剩余行程;
41、车辆充电行为动态信息,ev的充电行为过程主要分为行驶过程和充电过程,行驶过程可以用ev通过路径规划得到达充电站时的时刻tc(i)表示
42、
43、
44、其中,hij=1表示ev通过该路段,tsc(i)为e路径引导后计划行进的路段集合,tb(i)为ev开始参与调度的时刻,为t时刻路段i到路段j的路阻系数;
45、充电过程可分为充电等待时间gw(i)和充电时间两个时期;
46、充电等待时间gw(i)为
47、
48、其中,td(i-1)为充电队列顺序位于该车辆的前一辆车的充电结束时刻;
49、充电时间为
50、
51、其中,τc为充电桩充电效率,oc为充电桩充电功率,lm(i)为ev电池容量;
52、通过精细化的车-站-路-网动态融合模型获取当前ev、交通路网以及配电网实时信息;
53、ev实时信息包括当前位置信息、目标点位置信息、剩余电量信息以及上传需求时刻;
54、交通路网信息包括道路实时路阻系数以及充电站点等候车辆信息;
55、配电网信息包括光储运行情况、充电桩使用情况、充电车辆以及在站车辆信息。
56、结合第一方面的实施例,在一些实施例中,所述行车路径规划,对充电需求标志位进行判断,没有产生充电需求,采用分层规划的双向搜索lpa*算法规划路径,包括:
57、基于状态集合对电车充电需求进行判定ce(i)=1等式是否成立;
58、等式不成立则没有产生充电需求,随时记录测量当前位置和行驶速度,电车以行驶最短时间为目标对目的地进行导航;
59、根据当前路阻系数对导航路径进行规划,选择路阻系数最小路径;
60、对路阻系数最小路径采用分层规划的双向搜索lpa*算法规划路径;
61、计算起点和终点间的曼哈顿距离,并与阈值对比;
62、曼哈顿距离小于阈值则采用lpa*算法将起始点和目标点作为初始节点并以对方为目标节点进行路径搜索,直到二者路径节点相交时搜索完成;
63、曼哈顿距离超过阈值,采用分层规划对路网分层;
64、根据道路通行能力将快速路和主干路划分为高等级路网,次干路和支路划分为低等级路网;
65、通过目标函数和约束条件对起始点和目标点之间的路网进行分块;
66、交通侧的目标函数,选择充电站节点附近的交通阻塞情况为目标函数
67、u1=ph(j,t)=∑ms(j,i,ta)
68、其中,ms(j,i,ta)为ta时刻停留在充电站j的第i辆ev,ph(j,y)为y时刻充电站j停留的ev数量;
69、电力侧的目标函数,采用电压偏差最小为目标函数
70、
71、其中,d0为节点额定电压,δd(j,t)为t时刻充电站j电压偏差,d(j,ta)为节点ta时刻实际电压;
72、用户侧的目标函数,以ev从发送充电需求到到达充电站为止的总的时间成本为目标函数
73、u3=tc(i)-tb(i)
74、综合目标函数,采用极值法对多目标函数进行无量纲化
75、
76、其中,min(f1)、min(f2)、min(f3)分别为单独从交通路网通畅性、配电网稳定性以及ev用户角度考虑的最优化目标,ξ1、ξ2、ξ3为不同优化目标的权重占比;
77、ev用户电量约束
78、
79、其中,ac(i)为当前时刻到达充电站的剩余里程;
80、配电网稳定性约束
81、ok(j,t)<othr(j,t)
82、其中,othr(j,t)为t时刻充电站j的负荷阈值,ok(j,t)为t时刻充电站j的负荷;
83、对电荷状态进行约束
84、ibat,min≤ibat(t)≤ibatmax
85、其中,ibat,max、ibat,min分别为储能系统允许的最大和最小电荷状态;
86、对路段最低通行速度进行约束
87、
88、其中,v0为路段理想最高通行速度,aij为路段hij的长度;
89、偏离角对充电站点选择的方向上进行约束
90、
91、其中,zij、zid、zjd分别为起点i、充电站节点j及终点d三点之间的直线距离,当时,搜索方向正确;
92、将起点和终点作为搜索起点对与其相接近的高等级路网出入口节点进行第一次路径搜索;
93、在高层路网中搜索两节点间的最优路径,最终得到起点和终点间的最优路径;
94、在到达目的地前随时跟踪并更新所有规划路段的路阻信息;
95、规划行驶路段交通情况突然剧烈恶化,则在车主到达下一个节点前以下一节点为起始点完成路径规划并提示车主对路线进行修正
96、到达目的地后更新电池剩余电量,完成此次行程。
97、结合第一方面的实施例,在一些实施例中,所述充电路径规划,产生充电需求,通过综合目标最小为路径规划目标,通过分层规划的双向搜索lpa*算法规划充电路径,选择充电站进行充电,包括:
98、基于状态集合对电车充电需求进行判定ce(i)=1等式成立,产生充电需求;
99、计算根据当前实时信息对路网各部分优化目标的权重进行赋值并计算综合目标;
100、以综合目标u最小路径获得路径规划目标;
101、采用分层规划的双向搜索lpa*算法规划充电路径;
102、获取当前路段、节点、充电站及进站车辆等信息并计算交通路网各部分路阻系数
103、预计充电开始tk(i)和结束时间tg(i)
104、
105、tg(i)=tk(i)+gj(i)
106、通过能源地理信息融合的车-站-路-网模型获得后充电站负荷和车辆数量进行调度选择电桩以额定功率对电车进行充电。
107、第二方面,本公开实施例提供了一种新能源汽车路径规划系统,包括:
108、获取当前信息单元,结合大规模电车、区域路网、配电网以及光储充电站的动态信息构建了精细化的车-站-路-网动态融合模型并获取信息;
109、行车路径规划单元,对充电需求标志位进行判断,没有产生充电需求,采用分层规划的双向搜索lpa*算法规划路径;
110、充电路径规划单元,产生充电需求,通过综合目标最小为路径规划目标,通过分层规划的双向搜索lpa*算法规划充电路径,选择充电站进行充电;
111、充电后路径规划单元,充电完成,重新将行驶地点更改为目的地,再次以出行时间最短为目标进行路径规划,直至完成此次行程。
112、结合第二方面的实施例,在一些实施例中,所述获取当前信息单元,结合大规模电车、区域路网、配电网以及光储充电站的动态信息构建了精细化的车-站-路-网动态融合模型并获取信息,包括:
113、交通路网模型cg为
114、
115、其中,r为路网cg中所有路段集合,w为时段集合,根据系统运行间隔时间将全天划分为m个时段,cg为交通路网模型是有向带权网络,h为路网cg中所有节点集合,s为道路路段的路阻系数矩阵,反映路段通行能力;
116、路段拥堵对车辆行驶时间产生影响,采用改进brp模型和改进webster模型对路段阻抗和节点阻抗进行标定为
117、
118、
119、其中,mi(t)为节点hi的阻抗,tij(t)为路段hij的阻抗,t0为理想行程时间,i为道路饱和度,δ、ε为阻抗影响参数,q为车辆到达率,c为信号周期,θ为绿信比,是交通灯一个周期内可用于车辆通行的时间比例;
120、车辆行驶时间还会受路口信号灯的控制,道路路阻包括路段路阻和节点路阻,道路路阻模型为
121、电车的能源网络模型为电网模型,其负荷设施为光储充电站,结合城市电网的实际情况,对光储充电站的负荷进行建模;
122、储能系统在t时刻的充放电模型为
123、
124、其中,λch、λdis分别为储能的充、放电效率,obat,ch、obat,dis分别为储能的充、放电功率,sbat(t)、sbat(t-1)分别为t时刻、t-1时刻储能的荷电状态,δt为采样时间间隔,mbat为储能容量;
125、光储系统为
126、峰时段优先使用光伏充电,当光伏出力不够且负荷高于节点负荷阈值的20%时,使用储能;
127、平时段光伏优先满足充电站的基础负荷,余电存储于储能,若平时段荷电状态低于20%,则除光伏外向电网购电至50%或平时段结束;
128、谷时段储能系统向大电网购电;
129、配电网节点a处的光储充电站在任一时刻的节点负荷oa为
130、oa=oev+opv+obat
131、oev为ev充电功率总和,opv为光伏板放电功率,obat为储能系统的充放电功率,当负荷充电时取正,放电时取负;
132、电车模型包括空间分布信息、电池能量状态、充电信息、车辆充电行为动态信息;
133、空间分布信息
134、对h辆电车进行编号,对每一辆电车以状态集合vev(i)(i=1,2,…,h)表示,记录每一辆电车对应起点、终点及电荷状态;
135、基于状态集合对电车充电需求进行判定
136、
137、其中,hch(i)为第i辆电车所选充电站,j为充电站编号,ce(i)为第i辆电车的充电需求标志,当车辆产生充电需求时置1,反之置0;
138、电池能量状态及充电信息,电车每行驶1km的耗电量模型vs为
139、
140、其中,v为路段实际平均速度,vs为电车行驶1km的耗电量;
141、充电电池充满时的电量范围为100-120kwh,初始时刻的剩余电量l0(i)为
142、l0(i)=[(0.5~0.8)lm(i)]
143、t时刻ev的剩余电量lt(i)为
144、
145、其中,为能效指标,lt-1为t-1时刻时ev的剩余电量,d为从t-1时刻到t时刻为止第i辆汽车行驶的路程;
146、基于车辆实时电量设置充电需求触发条件为
147、lt(i)=τllm(t)
148、lt(i)≤arvs
149、其中,τv为电池电荷状态,ar为当前ev距离目的地的剩余行程;
150、车辆充电行为动态信息,ev的充电行为过程主要分为行驶过程和充电过程,行驶过程可以用ev通过路径规划得到达充电站时的时刻tc(i)表示
151、
152、
153、其中,hij=1表示ev通过该路段,tsc(i)为e路径引导后计划行进的路段集合,tb(i)为ev开始参与调度的时刻,为t时刻路段i到路段j的路阻系数;
154、充电过程可分为充电等待时间gw(i)和充电时间两个时期;
155、充电等待时间gw(i)为
156、
157、其中,td(i-1)为充电队列顺序位于该车辆的前一辆车的充电结束时刻;
158、充电时间为
159、
160、其中,τc为充电桩充电效率,oc为充电桩充电功率,lm(i)为ev电池容量;
161、通过精细化的车-站-路-网动态融合模型获取当前ev、交通路网以及配电网实时信息;
162、ev实时信息包括当前位置信息、目标点位置信息、剩余电量信息以及上传需求时刻;
163、交通路网信息包括道路实时路阻系数以及充电站点等候车辆信息;
164、配电网信息包括光储运行情况、充电桩使用情况、充电车辆以及在站车辆信息。
165、结合第二方面的实施例,在一些实施例中,所述行车路径规划单元,对充电需求标志位进行判断,没有产生充电需求,采用分层规划的双向搜索lpa*算法规划路径,包括:
166、基于状态集合对电车充电需求进行判定ce(i)=1等式是否成立;
167、等式不成立则没有产生充电需求,随时记录测量当前位置和行驶速度,电车以行驶最短时间为目标对目的地进行导航;
168、根据当前路阻系数对导航路径进行规划,选择路阻系数最小路径;
169、对路阻系数最小路径采用分层规划的双向搜索lpa*算法规划路径;
170、计算起点和终点间的曼哈顿距离,并与阈值对比;
171、曼哈顿距离小于阈值则采用lpa*算法将起始点和目标点作为初始节点并以对方为目标节点进行路径搜索,直到二者路径节点相交时搜索完成;
172、曼哈顿距离超过阈值,采用分层规划对路网分层;
173、根据道路通行能力将快速路和主干路划分为高等级路网,次干路和支路划分为低等级路网;
174、通过目标函数和约束条件对起始点和目标点之间的路网进行分块;
175、交通侧的目标函数,选择充电站节点附近的交通阻塞情况为目标函数
176、u1=ph(j,t)=∑ms(j,i,ta)
177、其中,ms(j,i,ta)为ta时刻停留在充电站j的第i辆ev,ph(j,t)为t时刻充电站j停留的ev数量;
178、电力侧的目标函数,采用电压偏差最小为目标函数
179、
180、其中,d0为节点额定电压,δd(j,t)为t时刻充电站j电压偏差,d(j,ta)为节点ta时刻实际电压;
181、用户侧的目标函数,以ev从发送充电需求到到达充电站为止的总的时间成本为目标函数
182、u3=tc(i)-tb(i)
183、综合目标函数,采用极值法对多目标函数进行无量纲化
184、
185、其中,min(f1)、min(f2)、min(f3)分别为单独从交通路网通畅性、配电网稳定性以及ev用户角度考虑的最优化目标,ξ1、ξ2、ξ3为不同优化目标的权重占比;
186、ev用户电量约束
187、
188、其中,ac(i)为当前时刻到达充电站的剩余里程;
189、配电网稳定性约束
190、ok(j,t)<othr(j,t)
191、其中,othr(j,t)为t时刻充电站j的负荷阈值,ok(j,t)为t时刻充电站j的负荷;
192、对电荷状态进行约束
193、ibat,min≤ibat(t)≤ibatmax
194、其中,ibat,max、ibat,min分别为储能系统允许的最大和最小电荷状态;
195、对路段最低通行速度进行约束
196、
197、其中,v0为路段理想最高通行速度,aij为路段hij的长度;
198、偏离角对充电站点选择的方向上进行约束
199、
200、其中,zij、zid、zjd分别为起点i、充电站节点j及终点d三点之间的直线距离,当时,搜索方向正确;
201、将起点和终点作为搜索起点对与其相接近的高等级路网出入口节点进行第一次路径搜索;
202、在高层路网中搜索两节点间的最优路径,最终得到起点和终点间的最优路径;
203、在到达目的地前随时跟踪并更新所有规划路段的路阻信息;
204、规划行驶路段交通情况突然剧烈恶化,则在车主到达下一个节点前以下一节点为起始点完成路径规划并提示车主对路线进行修正
205、到达目的地后更新电池剩余电量,完成此次行程。
206、结合第二方面的实施例,在一些实施例中,所述充电路径规划单元,产生充电需求,通过综合目标最小为路径规划目标,通过分层规划的双向搜索lpa*算法规划充电路径,选择充电站进行充电,包括:
207、基于状态集合对电车充电需求进行判定ce(i)=1等式成立,产生充电需求;
208、计算根据当前实时信息对路网各部分优化目标的权重进行赋值并计算综合目标;
209、以综合目标u最小路径获得路径规划目标;
210、采用分层规划的双向搜索lpa*算法规划充电路径;
211、获取当前路段、节点、充电站及进站车辆等信息并计算交通路网各部分路阻系数
212、预计充电开始tk(i)和结束时间tg(i)
213、
214、tg(i)=tk(i)+gj(i)
215、通过能源地理信息融合的车-站-路-网模型获得后充电站负荷和车辆数量进行调度选择电桩以额定功率对电车进行充电。
216、第三方面,本公开实施例提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当上述一个或多个程序被上述一个或多个处理器执行,使得上述一个或多个处理器实现如第一方面上述的新能源汽车路径规划方法。
217、第四方面,本公开实施例提供了一种计算机可读介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面上述的新能源汽车路径规划方法的步骤。
218、本发明有益效果:获取当前信息,结合大规模电车、区域路网、配电网以及光储充电站的动态信息构建了精细化的车-站-路-网动态融合模型并获取信息;行车路径规划,对充电需求标志位进行判断,没有产生充电需求,采用分层规划的双向搜索lpa*算法规划路径;充电路径规划,产生充电需求,通过综合目标最小为路径规划目标,通过分层规划的双向搜索lpa*算法规划充电路径,选择充电站进行充电;充电后路径规划,充电完成,重新将行驶地点更改为目的地,再次以出行时间最短为目标进行路径规划,直至完成此次行程。解决了因城市功能区划分带来区域交通不均衡以及光伏发电不灵活带来的部分光储充电站能源消纳不充分的问题,有效避免高峰时段电车集群充电需求带来的充电站周围路段拥堵问题,局部改善路网运行状况,提高电车的充电效率的同时,保证了配电网的稳定性和安全性,提高了充电站的经济性以及适应性,大幅降低了运算时间,提高了搜索速率。
- 还没有人留言评论。精彩留言会获得点赞!