基线长度约束的北斗高精度相对定位方法
本发明涉及卫星导航技术,具体涉及利用基线长度先验约束信息提升北斗等卫星导航系统相对定位解算性能的方法。
背景技术:
1、相对定位技术用于求解移动载体相对于参考站的三维位置信息,其更加关注两者之间的相对位置,而非各自的绝对位置,在飞机自主空中加油、全自动着陆等应用中具有重要作用。
2、基于北斗载波相位观测量的相对定位技术能够提供厘米级至毫米级的测量精度,其关键是包含在载波相位观测量中的整周模糊度的快速可靠解算。通常,移动载体和参考站各安装一个天线,基于卫星的相对定位的核心也就是对移动端和参考端的原始观测数据进行站间和星间差分处理,建立包含两者之间相对位置参量的观测模型,在正确解算出整周模糊度参量的前提下,实现移动端与参考端之间相对位置的精确估计。
3、随着北斗三号的快速发展,基于北斗的相对定位应用越来越广泛,载体上安装两个或多个天线的场景也越来越常见。如果将可提前精确测量的先验基线长度约束信息严格融入相对定位的观测模型,不仅能有效提升观测模型的强度从而增强整周模糊度解算的可靠性,还能在一定程度上提高相对定位的精度。然而,在大多数应用场景中,载体上的双天线通常仅互做备份,天线之间的基线长度信息并没有得到充分、有效的利用,因而相对定位可靠性还有较为可观的提升空间。另外,由于载体实时运动而非静止,多天线的基线长度约束信息由线性变为非线性,当将其融入观测模型时,目标函数的形式将不同于传统无约束情况,由目标函数确定的整周模糊度搜索空间的形状也将由此发生明显变化,导致传统的整周模糊度解算方法难以用于约束情况下的参数求解。因此,如何将先验基线长度约束信息充分融入观测模型以提升参数估计的可靠性,如何设计合理有效的新目标函数下整周模糊度的搜索策略以实现整周模糊度的有效搜索,就成为实现基线长度约束的相对定位技术的难点和挑战。
技术实现思路
1、针对现有技术存在的问题,为提升相对定位解算的可靠性,本发明充分利用移动载体双天线之间的基线长度信息,提供一种基线长度约束的北斗高精度相对定位方法,具体包括下列步骤:
2、第一步:利用参考站与移动站的伪距和载波相位原始观测量建立双差相对定位模型
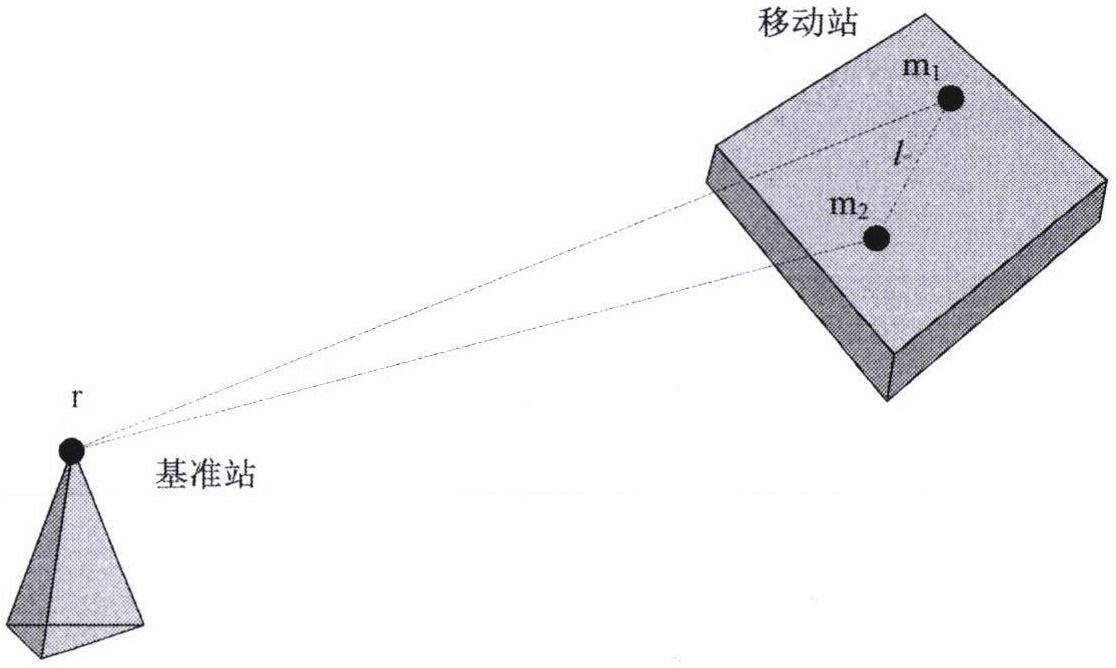
3、假设移动载体上的m1和m2两个天线以及基准站天线r在f频点上同时观测s+1颗卫星,则对于第一个移动站接收机m1和基准站接收机r组成的第一个基线有如下观测方程
4、
5、其中,所涉及的基线均为小于10km的短基线,e(·)表示期望算子,d(·)表示方差算子,为第i个基线观测值矩阵,i=1,2,这里的为第i个移动站和基准站的站间伪距观测值,为第i个移动站和基准站的站间单差载波相位观测值,为第i个移动站和基准站的站间整周模糊度,属于s维整数集合第一个基线属于三维实数集基线下标“rm”表示移动站m相关项与基准站r相关项之差,整周模糊度的系数矩阵其中,对角阵λf为第f个频点上的载波波长,is表示s维单位阵;基线向量系数矩阵移动站到卫星视线向量的单位矢量为星间差分视线向量矩阵,矩阵中的表示序号为a和b的两颗卫星之间的差分视线向量,ef是所有元素均为1的f×1维列向量,协方差矩阵和分别为载波相位观测量方差和伪距观测量方差,其中vec(·)是向量化算子;
6、同样,对于第二个移动站接收机m2到基准站接收机的基线有
7、
8、其中,为第二个基线,和分别表示第二个移动站和基准站的观测值矩阵、整周模糊度和协方差矩阵;
9、由于(1)和(2)式中均包含来自基准站的观测量,因此和并不互相独立;假设移动站和基准站接收机对伪距或载波相位的测量精度分别相同,那么有为基准站r的星间单差观测量yr的协方差阵;
10、将(1)和(2)式合并写为
11、
12、上式即为双差相对定位的观测模型;式中两个基线观测值的合成矩阵波长合成矩阵其中为块对角化矩阵,表示以(a,a)为对角线元素产生的新矩阵,星间差分视线合成矩阵整周模糊度合成矩阵属于2s维整数集合基线合成矩阵属于六维实数集利用双基站观测值计算得出协方差阵取值为确定值,表示将非差伪距和载波相位观测量方差转换为双差伪距和载波相位观测量方差的转换矩阵;为标准双差观测模型的方差-协方差矩阵,有式中代表移动站和基准站差分的下标“rm”均用“0”代替,因此,和分别表示典型的双天线相对定位模型中的载波相位观测量方差和伪距观测量方差;
13、第二步:根据最小二乘准则,基于双差相对定位模型获得严格的基线长度约束的目标函数
14、假设移动平台为刚性载体,且载体上的天线m1和m2均安装牢固,天线之间的直线距离为l,那么双天线之间的基线长度将不随载体的运动而发生改变,且这一长度能够提前精确测量;应用最小二乘准则,将(3)式转化为最小化问题的求解
15、
16、式中,是的马氏距离;
17、对(4)式作如下投影分解
18、
19、式中,p理解为下角标为模糊度浮点解协方差矩阵,为设计矩阵g的列向量空间的投影矩阵,为给定模糊度z情况下的基线条件解,是模糊度固定后的基线矢量,是模糊度浮点解,为基线与模糊度浮点解的协方差矩阵,为条件基线解的方差-协方差矩阵;
20、上式等价于
21、
22、(6)式即为严格的基线长度约束的目标函数;式中,c为基线矢量转换矩阵,将两条移动站到基线矢量转换为两个移动站之间的基线矢量,i3是三维单位阵,表示在的度量下,寻找一个满足条件的向量使得其距离最近,使得附加的基线残差二次型项能够有效提升模糊度解算成功率;
23、第三步:采用整周模糊度搜索空间放大策略,实现模糊度的有效搜索,在此基础上精确估计移动站相对于参考站的位置信息
24、根据(6)式,定义模糊度搜索空间如下
25、
26、式中,ω(·)为模糊度搜索空间,χ2为搜索空间门限;
27、采用模糊度搜索空间扩大的策略,让初始的χ2从一个较小的正值逐渐增大,直到搜索得到满足(7)式的最优模糊度;
28、对于(7)式中的第二项,每搜索到一组整周模糊度候选向量,均需要进行一次最优基线项的求解采用最优化算法进行最优解的迭代搜索;当达到收敛条件时停止迭代,此时得到的模糊度值即为最优模糊度,当模糊度被正确固定后,即得到包含在中的高精度相对定位基线解。
29、在本发明的一个实施例中,在第三步中,模糊度搜索空间扩大策略的步骤如下:
30、(1)令初始χ2为一个较小的正值;
31、(2)若ω0(χ2)为空集,那么ω(χ2)也一定为空集,转至步骤(4);若ω0(χ2)非空,则转至步骤(3);
32、(3)利用标准lambda算法在中进行模糊度的搜索,并判断候选模糊度是否满足(7)式,若均不满足,则转至步骤(4),否则转至步骤(5);
33、(4)按照一定步进量扩大χ2值并转至步骤(2);
34、(5)选择使得(7)式最小的模糊度作为最优模糊度。
35、在本发明的一个具体实施例中,在步骤(4)中,步进量为0.1。
36、在本发明的另一个具体实施例中,在第三步中,采用牛顿法或乘子法作为最优化算法。
37、本发明方法利用实际场景中通常未被充分利用的双天线基线长度信息提升相对定位的解算效果,相比于传统无约束情况,解算具有更高的可靠性。
38、本发明方法采用整周模糊度搜索空间扩大策略,从而将标准lambda算法扩展到基线长度约束的相对定位中,实现了整周模糊度的有效搜索。
- 还没有人留言评论。精彩留言会获得点赞!