基于光学相控阵技术的全固态调频连续波式激光雷达系统
本发明涉及激光雷达系统设计领域,更具体涉及基于光学相控阵技术的全固态调频连续波式激光雷达系统。
背景技术:
1、激光雷达通过主动式感知捕获周围环境信息实现高清实时3d图像,同时它具有独特的高精度、高分辨率测距和抗干扰能力强等优势,在自动驾驶、无人机、环境监测和可穿戴电子设备等领域有着重要的应用。按照激光扫描结构划分,激光雷达可分为机械式激光雷达、混合固态式激光雷达和全固态激光雷达。其中机械式激光雷达发展最为成熟,可实现360°扫描视场角,但是在实际应用中却不够稳定,同时高成本也限制了其大规模应用发展。混合固态式激光雷达通过mems(micro-electro-mechanical system,微机电系统)振镜来实现扫描,是近几年发展的热门方向,同时市场已推出相关产品。但是这种方式存在扫描角度有限,长期使用稳定性差,价格较高和集成度低等缺点。而全固态式激光雷达是未来的激光雷达的发展方向,它基于两种技术路径,一种是flash面扫式激光雷达,类似于相机成像原理,进行全像素成像,但是激光功率限制其不能进行远距离范围探测从而不能适应车载激光雷达的发展需求。另一种是基于opa(optical phase array,光学相控阵)技术的激光雷达,它借鉴相控阵雷达原理,将多通道光束在空间合成,从而形成具有一定指向性的光束。通过控制多通道间的相位差来实现光束在空间的扫描,具有体积小,结构简单和稳定性好等优点,而且与cmos(complementary metal oxide semiconductor,互补金属氧化物半导体)工艺技术兼容,可以实现大批量生产,因此,此技术逐渐成为固态激光雷达的研究热点。
2、fmcw(frequency modulated continuous wave,调频连续波)激光雷达是一种重要的激光雷达应用体制,fmcw激光雷达主要通过发送和接收连续激光束,把目标回光和本地光做干涉,并利用混频探测技术来测量发送和接收的频率差异,再通过频率差换算出目标物的距离。fmcw激光雷达具有抗环境光、抗激光雷达互扰的优点,信噪比高,可获取每个像素点的速度维数据,可实现更高程度的芯片化,更适应于纯固态激光雷达应用,是未来下一代全固态激光雷达技术的应用发展方向。将激光雷达的两种最具前景的技术相结合,可实现高性能、低成本、高稳定性的全固态激光雷达,同时助力未来激光雷达的大规模应用。
3、目前已有的fmcw激光雷达的研究方案都存在着架构复杂,动态范围低且不能同时对目标进行测距测速等缺点,不能满足未来高性能、低复杂度和低成本的激光雷达产品需求。随着光学相控阵技术的发展,结合光学相控阵固态扫描的原理,应用于fmcw激光雷达的方案开始得到重视,可以有效解决fmcw激光雷达扫描稳定性差的问题,也可实现fmcw激光雷达的高精度扫描。例如,中国专利公开号cn112764050a公开了一种激光雷达测量方法及激光雷达系统,就是光学相控阵固态扫描技术结合fmcw激光雷达的方案,其通过外调制方式,实现将光学相控阵和宽带可调谐激光器与调频连续波体制合理结合,克服宽带可调谐激光器难以窄带线性调频的不足,但是其对于激光雷达的水平视场角扫描范围以及垂直视场角扫描范围并没有研究,激光雷达的动态范围低,从而测试性能不够好。
技术实现思路
1、本发明所要解决的技术问题在于如何提高激光雷达的水平视场角扫描范围以及垂直视场角扫描范围,从而提高其动态范围,以提升测试性能。
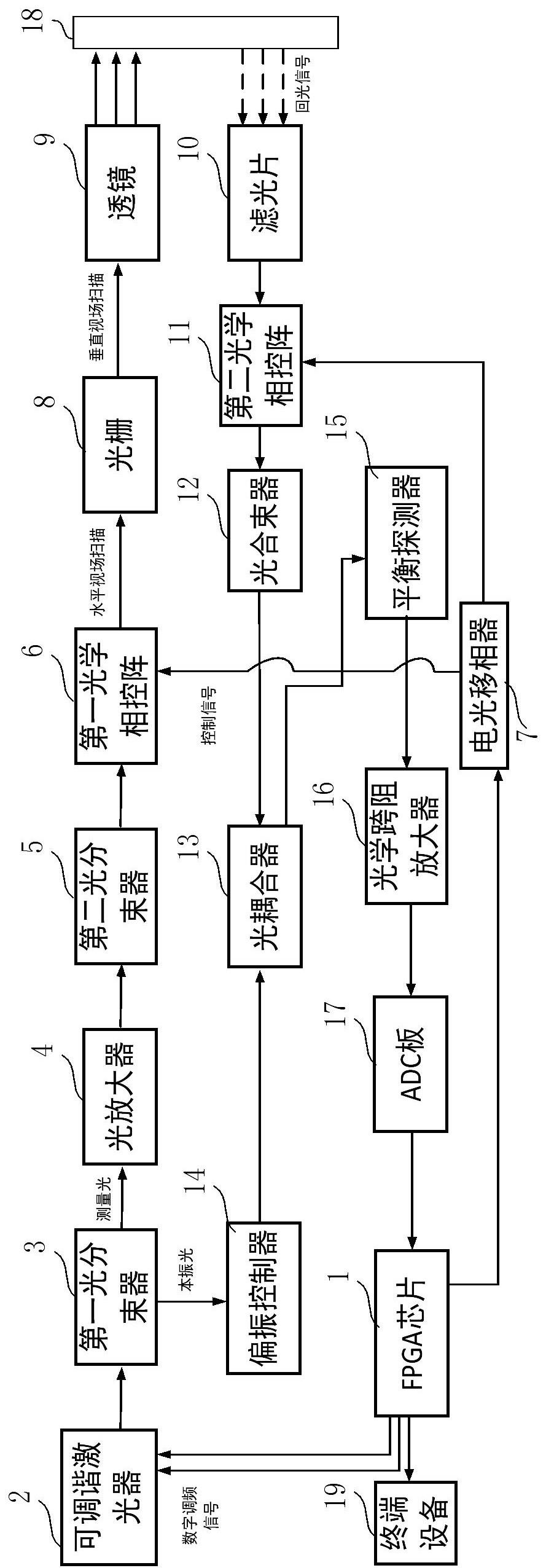
2、本发明通过以下技术手段实现解决上述技术问题的:基于光学相控阵技术的全固态调频连续波式激光雷达系统,包括可调谐激光器、第一光分束器、光放大器、第二光分束器、第一光学相控阵、光栅、透镜、电光移相器以及fpga芯片,所述fpga芯片的数字调频信号输入到可调谐激光器中,可调谐激光器产生激光并输入到第一光分束器,第一光分束器输出测量光到光放大器,光放大器对测量光进行功率放大以后输入到第二光分束器,第二光分束器将功率放大后的光信号等分成n路以后分别输入到第一光学相控阵的n路输入端口,n为正整数;fpga芯片控制电光移相器将控制信号加载到第一光学相控阵上,实现扫描范围为第一预设角度的水平视场扫描,第一光学相控阵将经过水平视场扫描的光信号输入到光栅中,实现扫描范围为第二预设角度的垂直视场扫描,经过垂直视场扫描的光信号输入到透镜以后聚焦到目标物体。
3、进一步地,所述基于光学相控阵技术的全固态调频连续波式激光雷达系统还包括滤光片、第二光学相控阵、光合束器、光耦合器以及偏振控制器,所述目标物体反射多路回光信号到所述滤光片,所述滤光片将多路回光信号中激光波长范围外的光进行滤除后输入到第二光学相控阵中,所述电光移相器对输入到第二光学相控阵中的多路回光信号进行调制,将多路回光信号进行相位对齐并输出到光合束器,光合束器将相位对齐后的多路回光信号合束输入到光耦合器中,同时第一光分束器还输出本振光到偏振控制器,偏振控制器的输出信号也输入到光耦合器中,光耦合器实现本振光和测量光的耦合。
4、更进一步地,所述基于光学相控阵技术的全固态调频连续波式激光雷达系统还包括平衡探测器、光学跨阻放大器以及adc板,所述光耦合器输出耦合后的本振光和测量光到平衡探测器进行混频,平衡探测器将混频后的光进行光-电转换并差分相减,从而将其中的直流量信号进行滤除,平衡探测器的输出信号进入到光学跨阻放大器进行放大,然后将放大的信号送到adc板进行模拟-数字转换后送到fpga芯片进行目标距离和目标速度解算。
5、更进一步地,所述光耦合器的耦合比为50:50。
6、更进一步地,所述第一光分束器为1:2光分束器,所述第一光分束器接收可调谐激光器产生的激光,输出2路信号,一路为所述测量光,另一路为所述本振光。
7、进一步地,所述可调谐激光器产生的激光的波长范围为1350nm~1650nm。
8、进一步地,所述第二光分束器为1:64光分束器,所述第二光分束器将功率放大后的光信号等分成64路。
9、更进一步地,所述第一光学相控阵有64路输入端口,所述第二光分束器将功率放大后的光信号等分成64路以后分别输入到第一光学相控阵的64路输入端口。
10、进一步地,所述第一预设角度为60°,所述第二预设角度为15°。
11、进一步地,所述水平视场扫描的扫描分辨率为0.2°,所述垂直视场扫描的扫描分辨率为0.4°。
12、本发明的优点在于:
13、(1)本发明通过fpga芯片控制电光移相器将控制信号加载到第一光学相控阵上,实现扫描范围为第一预设角度的水平视场扫描,第一光学相控阵将经过水平视场扫描的光信号输入到光栅中,实现扫描范围为第二预设角度的垂直视场扫描,有效提高激光雷达的水平视场角扫描范围以及垂直视场角扫描范围,从而提高激光雷达的动态范围,进一步提升其测试性能。
14、(2)本发明滤光片将激光波长范围外的光进行滤除后输入到第二光学相控阵中,平衡探测器将混频后的光进行光-电转换并差分相减,从而将其中的直流量信号进行滤除,因此整个电路结构消除了待测试的激光信号波长范围以外的信号以及干扰信号,从而提高激光雷达测试的准确性,提高系统稳定性。
15、(3)本发明基于光学相控阵技术结合fmcw式激光雷达体制,实现具有大扫描视场角度的全固态式的fmcw激光雷达测试系统,结构简单,大大减小了现有fmcw激光雷达的成本,有助于实现未来激光雷达的大规模应用。
- 还没有人留言评论。精彩留言会获得点赞!