基于激光传感器的机械式水表智能检定装置及固定方法与流程
本发明涉及图像定位,尤其涉及一种基于激光传感器的机械式水表智能检定装置及固定方法。
背景技术:
1、智能水表是一种利用现代微电子技术、现代传感技术、智能ic卡技术对用水量进行计量并进行用水数据传递及结算交易的新型水表。与传统水表一般只具有流量采集和机械指针显示用水量的功能相比,是很大的进步。智能水表除了可对用水量进行记录和电子显示外,还可以按照约定对用水量进行控制,并且自动完成阶梯水价的水费计算,同时可以进行用水数据存储的功能。
2、但现有的智能水表存在以下问题:未能精准获取智能水表表盘位置,需由人工手动校准以获取表盘信息。
技术实现思路
1、为此,本发明提供一种基于激光传感器的机械水表智能检定装置及固定方法,用以克服现有技术中未能在采集器中精准定位表盘所在位置并对表盘信息进行获取的问题。
2、为实现上述目的,本发明的技术方案是:
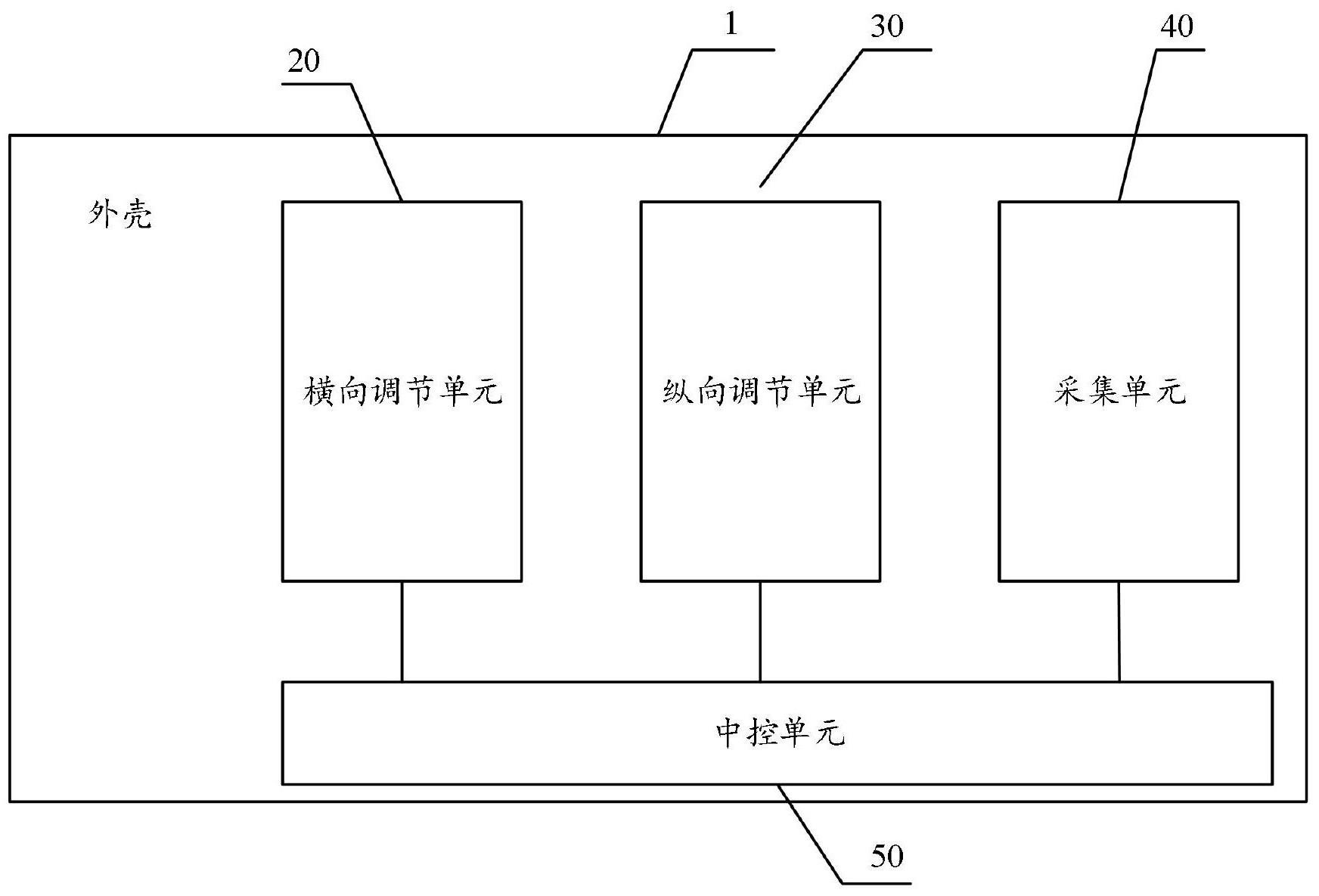
3、第一方面,本发明提供一种基于激光传感器的机械水表智能检定装置,包括检测器,所述检测器包括:
4、采集单元,其包括第一采集器、第二采集器以及第三采集器;所述第一采集器用于采集智能水表第一表盘图像信息,所述第二采集器用于采集智能水表第二表盘图像信息,所述第三采集器用于采集智能水表外轮廓的图像信息;
5、调节单元,用以调节所述采集单元在水平方向和竖直方向上的采集位点;
6、中控单元,其分别与所述调节单元以及所述采集单元相连接,用以根据所述第三采集器所采集到的智能水表外轮廓的图像信息来控制所述调节单元来将所述第一采集器和第二采集器水平移动至对应位置,以及,根据所述第一采集器采集到的图像信息来控制所述调节单元将所述第一采集器和第二采集器竖直移动至对应位置以使第一采集器和第二采集器采集到的图像信息中表针特征位于对应位置。
7、进一步地,所述调节单元,包括:
8、横向调节单元,用以调节采集单元在水平方向上的采集位点,包括横向电机、设置在所述横向电机左输出端的第一横向螺杆以及设置在所述横向电机右输出端且与第一横向螺杆同轴的第二横向螺杆;其中,所述第一横向螺杆上套设有第一滑块,第二横向螺杆上套设有第二滑块,所述第一横向螺杆与第二横向螺杆相同且对称设置在所述横向电机两侧;所述横向调节单元还设有一横导轨,横导轨与所述第一横向螺杆平行且分别贯穿所述第一滑块与第二滑块,用以使第一滑块和第二滑块沿对应方向移动;
9、纵向调节单元,用以调节采集单元在竖直方向上的采集位点,包括位于所述横向电机上方的纵向电机以及设置在纵向电机输出端的纵向螺杆,纵向螺杆竖直设置在外壳内且贯穿所述横向电机,用以通过旋转控制横向电机纵向移动,纵向电机底部还设有一与纵向螺杆平行的纵导轨,纵导轨贯穿横向电机,用以对横向电机的移动路径进行约束;
10、所述第一采集器设置在所述第一滑块一侧,所述第二采集器设置在所述第二滑块一侧;
11、所述中控单元用以根据所述第三采集器所采集到的智能水表外轮廓的图像信息来确定所述横向电机针对所述第二横向螺杆的启动延时以分别将所述第一采集器和所述第二采集器水平移动至对应位置,以及,根据第一采集器采集到的图像信息将第一采集器和第二采集器竖直移动至对应位置以使第一采集器和第二采集器采集到的图像信息中表针特征位于对应位置。
12、进一步地,所述中控单元在第一预设条件控制所述第三采集器采集智能水表外轮廓的图像信息,以图像信息中表盘几何中心为原点建立直角坐标系,中控单元分别获取智能水表在坐标系中的位置以确定所述第一采集器对应的第一采集位点的纵坐标,中控单元以分别获取智能水表两表盘间距l以及两盘中心所处位点连线的延长线与图像信息中外轮廓的两交点间的水平距离d,并根据l和d初步确定与所述第一采集器对应的第一采集位点的横坐标la,设定la=lm-l/2+αi×d,其中,lm为所述图像信息中两盘中心连线中点处的横坐标、αi为中控单元根据水平距离d确定的第i预设表针位置调节系数,i=1,2,3;
13、所述中控单元根据水平距离d确定的表针位置调节系数的选定方式;
14、所述选定方式包括:
15、第一选定方式为,所述中控单元使用第一表针位置调节系数α1计算与所述第一采集器对应的第一采集位点的横坐标;所述第一选定方式满足所述水平距离小于等于第一预设轮廓宽度;
16、第二选定方式为,所述中控单元使用第二表针位置调节系数α2计算与所述第一采集器对应的第一采集位点的横坐标;所述第二选定方式满足所述水平距离小于等于第二预设轮廓宽度且大于所述第一预设轮廓宽度;
17、第三选定方式为,所述中控单元使用第三表针位置调节系数α3计算与所述第一采集器对应的第一采集位点的横坐标;所述第三选定方式满足所述水平距离大于所述第二预设轮廓宽度;
18、其中,第一预设轮廓宽度小于第二预设轮廓宽度,第一预设表针位置调节系数小于第二预设表针位置调节系数小于第三预设表针位置调节系数;
19、所述第一预设条件为系统运行以采集智能水表的表盘图像信息。
20、进一步地,所述中控单元设定与所述第二采集器对应的第二采集位点的纵坐标与所述第一采集位点的纵坐标相同且根据la选取对应的第i预设表针位置调节系数αi求得第二采集位点的横坐标lb,设定lb=lm+l/2+αi×d,其中i=1,2,3。
21、进一步地,所述中控单元在第二预设条件根据所述第一采集位点的横坐标和所述第二采集位点的横坐标确定所述第二横向螺杆的启动延时的延时设定方式,其中,
22、第一延时设定方式为所述中控单元使用第一预设延时为所述第二横向螺杆的启动延时;所述第一延时设定方式满足所述第一采集位点的横坐标的绝对值等于所述第二采集位点的横坐标的绝对值;
23、第二延时设定方式为所述中控单元根据第一采集位点的横坐标的绝对值与标准距离的差值确定所述第二横向螺杆的启动延时的延时二次设定方式;所述第二延时设定方式满足所述第一采集位点的横坐标的绝对值大于所述第二采集位点的横坐标的绝对值;
24、第三延时设定方式为所述中控单元根据第二采集位点的横坐标的绝对值与标准距离的差值确定所述第二横向螺杆的启动延时的延时三次设定方式;所述第三延时设定方式满足所述第一采集位点的横坐标的绝对值小于所述第二采集位点的横坐标的绝对值;
25、所述中控单元在第二延时设定方式下根据第一采集位点的横坐标的绝对值与标准距离的差值确定所述第二横向螺杆的启动延时的延时二次设定方式,其中,
26、第一延时二次设定方式为所述中控单元使用第二预设延时为所述第二横向螺杆的启动延时;第一延时二次设定方式满足第一采集位点的横坐标的绝对值与标准距离的差值小于等于第一预设延时差值;
27、第二延时二次设定方式为所述中控单元将使用第一预设延时调节系数调节后的第二预设延时作为所述第二横向螺杆的启动延时;第二延时二次设定方式满足第一采集位点的横坐标的绝对值与标准距离的差值小于等于第二预设延时差值且大于所述第一预设延时差值;
28、第三延时二次设定方式为所述中控单元将使用第二预设延时调节系数调节后的第二预设延时作为所述第二横向螺杆的启动延时;第三延时二次设定方式满足第一采集位点的横坐标的绝对值与标准距离的差值大于所述第二预设延时差值;
29、所述中控单元在第三延时设定方式下根据第二采集位点的横坐标的绝对值与标准距离的差值确定所述第二横向螺杆的启动延时的延时三次设定方式,其中,
30、第一延时三次设定方式为所述中控单元使用第三预设延时为所述第二横向螺杆的启动延时;第一延时三次设定方式满足第一采集位点的横坐标的绝对值与标准距离的差值小于等于第一预设延时差值;
31、第二延时三次设定方式为所述中控单元将使用第一预设延时增大调节系数调节后的第三预设延时作为所述第二横向螺杆的启动延时;第二延时三次设定方式满足第一采集位点的横坐标的绝对值与标准距离的差值小于等于第二预设延时差值且大于所述第一预设延时差值;
32、第三延时三次设定方式为所述中控单元将使用第二预设延时增大调节系数调节后的第三预设延时作为所述第二横向螺杆的启动延时;第三延时三次设定方式满足第一采集位点的横坐标的绝对值与标准距离的差值大于所述第二预设延时差值;
33、其中标准距离为智能水表两表盘间距的长度的二分之一;
34、所述第二预设条件为所述中控单元分别完成对la和lb的确定。
35、进一步地,所述中控单元通过所述第一采集器和所述第二采集器分别采集智能水表的表盘信息,并通过表盘信息获取表盘特征,表盘特征包括面积特征、表针特征以及刻度特征,中控单元根据所述第一采集器采集到的第一表盘信息确定纵向电机的运行方式,其中,
36、第一纵向电机的运行方式为所述中控单元根据表针特征与第一表盘信息中下边缘的距离和预设表针点位与第一表盘信息中下边缘的距离的差值确定纵向电机的旋转方式和纵向电机旋转时长设定方式,其中,
37、第一纵向电机旋转方式为所述中控单元控制所述纵向电机正向旋转以使所述第一采集器上升;所述第一纵向电机旋转方式满足表针特征与第一表盘信息中下边缘的距离和预设表针点位与第一表盘信息中下边缘的距离的差值小于预设差值;
38、第二纵向电机旋转方式为所述中控单元控制所述纵向电机反向旋转以使所述第一采集器下降;所述第二纵向电机旋转方式满足表针特征与第一表盘信息中下边缘的距离和预设表针点位与第一表盘信息中下边缘的距离的差值大于预设差值;
39、第一旋转时长设定方式为所述中控单元判定所述第一表盘信息中表针特征的位置符合预设标准,将纵向电机旋转时长设定为预设第一旋转时长;所述第一旋转时长设定方式满足表针特征与第一表盘信息中下边缘的距离和预设表针点位与第一表盘信息中下边缘的距离的差值的绝对值等于预设差值;
40、第二旋转时长设定方式为所述中控单元判定所述第一表盘信息中表针特征的位置不符合预设标准,使用第一预设旋转时长调节系数将纵向电机的旋转时长调节至对应值;所述第二旋转时长设定方式满足表针特征与第一表盘信息中下边缘的距离和预设表针点位与第一表盘信息中下边缘的距离的差值的绝对值大于预设差值且小于等于第一预设距离差值;
41、第三旋转时长设定方式为所述中控单元判定所述第一表盘信息中表针特征的位置不符合预设标准,使用第二预设旋转时长调节系数将纵向电机的旋转时长调节至对应值;所述第三旋转时长设定方式满足表针特征与第一表盘信息中下边缘的距离和预设表针点位与第一表盘信息中下边缘的距离的差值的绝对值小于等于第二预设距离差值且大于第一预设距离差值;
42、第四旋转时长设定方式为所述中控单元判定所述第一表盘信息中表针特征的位置不符合预设标准,使用第三预设旋转时长调节系数将纵向电机的旋转时长调节至对应值;所述第四旋转时长设定方式满足表针特征与第一表盘信息中下边缘的距离和预设表针点位与第一表盘信息中下边缘的距离的差值的绝对值大于第二预设距离差值;
43、所述第一纵向电机的运行方式满足所述中控单元能从所述第一表盘信息中获取表针特征;
44、第二纵向电机的运行方式为所述中控单元根据第一表盘信息中面积特征与刻度特征交界处轮廓切线的平均夹度确定所述第一采集器的移动方向以及所述横向电机和所述纵向电机的转速比;
45、所述第二纵向电机的运行方式满足所述中控单元未能从所述第一表盘信息中获取到表针特征。
46、进一步地,所述中控单元在第三预设条件根据获取的第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的平均夹角确定第一采集器移动方向的选定方式,其中,
47、第一移动方向选定方式为所述中控单元控制所述第一采集器向左上方移动;所述第一移动方向选定方式满足第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的平均夹角大于等于第一预设标准夹角且小于第二预设标准夹角;
48、第二移动方向选定方式为所述中控单元控制所述第一采集器向右方移动;所述第二移动方向选定方式满足第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的平均夹角等于第二预设标准夹角;
49、第三移动方向选定方式为所述中控单元控制所述第一采集器向左下方移动;所述第三移动方向选定方式满足第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的平均夹角大于等于第二预设标准夹角且小于等于第三预设标准夹角;
50、所述第三预设条件为所述中控单元未能从所述第一表盘信息中获取到表针特征且第一表盘信息中面积特征位于刻度特征的左侧。
51、进一步地,所述中控单元在第四预设条件下根据获取的所述第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的平均夹角确定第一采集器移动方向的二次选定方式,其中,
52、第一移动方向二次选定方式为所述中控单元控制所述第一采集器向右上方移动;所述第一移动方向二次选定方式满足第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的平均夹角大于等于第一预设标准夹角且小于第二预设标准夹角;
53、第二移动方向二次选定方式为所述中控单元控制所述第一采集器向左方移动;所述第二移动方向二次选定方式满足第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的平均夹角等于第二预设标准夹角;
54、第三移动方向二次选定方式为所述中控单元控制所述第一采集器向右下方移动;所述第三移动方向二次选定方式满足第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的平均夹角大于等于第二预设标准夹角且小于等于第三预设标准夹角;
55、所述第四预设条件为所述中控单元未能从所述第一表盘信息中获取到表针特征且第一表盘信息中面积特征位于刻度特征的右侧。
56、进一步地,所述中控单元在第五预设条件根据所述第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的夹角确定所述横向电机和所述纵向电机的转速比b的调节方式,设定b=va/vb,其中,va为横向电机的转速,vb为纵向电机的转速,
57、第一转速比调节方式为所述中控单元判定使用第二预设转速比调节系数将所述横向电机和所述纵向电机的转速比调节至对应值;所述第一转速比调节方式为满足第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的夹角大于等于第一预设标准夹角且小于等于第一预设夹角;
58、第二转速比调节方式为所述中控单元判定使用第一预设转速比调节系数将所述横向电机和所述纵向电机的转速比调节至对应值;所述第二转速比调节方式为满足第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的夹角大于第一预设夹角且小于第二预设标准夹角,或第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的夹角大于第二预设标准夹角且小于等于第二预设夹角;
59、第三转速比调节方式为所述中控单元判定使用第二预设转速比调节系数将所述横向电机和所述纵向电机的转速比调节至对应值;所述第三转速比调节方式为满足第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的夹角大于第二预设夹角且小于等于第三预设标准夹角;
60、第四转速比调节方式为所述中控单元判定将所述纵向电机关闭,并控制所述横向电机旋转以将所述第一采集器水平移动至对应位置;所述第四转速比调节方式为满足第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的夹角等于第二预设标准夹角;
61、所述第五预设条件为所述中控单元完成对所述第一采集器的移动方向的确定。
62、第二方面,本发明提供一种基于如上任一项所述的基于激光传感器的机械水表智能检定装置的固定方法,包括:
63、调节采集单元在水平方向上的采集位点,在调节时使用的横向调节单元包括横向电机、设置在横向电机左输出端的第一横向螺杆以及设置在所述横向电机右输出端且与第一横向螺杆同轴的第二横向螺杆,其中,第一横向螺杆上套设有第一滑块,第二横向螺杆上套设有第二滑块,所述第一横向螺杆与第二横向螺杆相同且对称设置在所述横向电机两侧;所述横向调节单元还设有一横导轨,横导轨与所述第一横向螺杆平行且分别贯穿所述第一滑块与第二滑块,用以使第一滑块和第二滑块沿对应方向移动;
64、调节采集单元在竖直方向上的采集位点,在调节时使用的纵向调节单元,其设置在所述外壳内部,包括设置在所述外壳内部且位于所述横向电机上方的纵向电机以及设置在纵向电机输出端的纵向螺杆,纵向螺杆竖直设置在外壳内且贯穿所述横向电机,用以通过旋转控制横向电机纵向移动,纵向电机底部还设有一与纵向螺杆平行的纵导轨,纵导轨贯穿横向电机,用以对横向电机的移动路径进行约束;
65、采集智能水表第一表盘图像信息;
66、采集智能水表第二表盘图像信息;
67、采集智能水表外轮廓的图像信息;
68、根据智能水表的外轮廓确定所述横向电机针对所述第二横向螺杆的启动延时以分别将所述第一采集器和所述第二采集器水平移动至对应位置,以及,根据第一采集器采集到的图像信息将第一采集器和第二采集器竖直移动至对应位置以使第一采集器和第二采集器采集到的图像信息中表针特征位于对应位置。
69、本发明与现有技术相比,其有益效果在于:
70、1、所述中控单元根据智能水表的外轮廓初步确定第一采集器和第二采集器的坐标,在保证本系统可应于不同智能水表的同时,保证了采集信息的完整性,中控单元根据第一采集器和第二采集器的横坐标确定第二横向螺杆延迟时长,并根据第一采集器和第二采集器采集到的图像信息中表针特征位于对应位置将第一采集器和第二采集器移动至对应位置,进一步提高了智能水表待采集信息获取的精确度。
71、2、根据智能水表的轮廓特征建立坐标系,以便精确地对采集器位置进行定位与调节,并根据智能水表的外轮廓特征初步确定第一采集器的坐标位置,在保证检测系统可适用于不同外轮廓与表盘特征的同时,进一步地确保了智能水表待采集信息获取的精确度。
72、3、根据智能水表的外轮廓特征与第一采集器的坐标位置初步确定第二采集器的具体位置,以便精确地获取智能水表的待采集信息。
73、4、根据智能水表外轮廓的信息确定第二横向螺杆的启动延时以将采集器移动至具体横向坐标的位置,在确保可适用于各种不同轮廓类型的智能水表的同时,进一步地确保了智能水表待采集信息获取的精确度。
74、5、根据获取图像中的表盘信息,判定第一表盘信息中是否可获取表针特征,若能获取表针特征则将纵向电机的旋转时长调节至对应值,以将采集器的纵向距离调节至对应值,中控单元在判定不能在表盘信息中获取表针特征时,根据第一表盘信息中面积特征与刻度特征交界处轮廓切线的平均夹角确定所述第一采集器的移动方向以及所述横向电机和所述纵向电机的转速比,进一步提高了采集器对智能水表表盘信息采集的精确度。
75、6、中控单元根据第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的平均夹角θ,和所述面积特征与刻度特征的位置信息判定第一采集器的移动方向,进一步提高了采集器对智能水表表盘信息采集的精确度。
76、7、所述中控单元在判定所述面积特征与刻度特征的位置信息后控制所述横向电机正转或反转,并根据第一表盘信息中面积特征与刻度特征交界处轮廓切线与第一表盘信息中底部边缘在刻度特征处的平均夹角θ将横向电机与纵向电机的转速比调节至对应值,进一步提高了采集器对智能水表表盘信息采集的精确度。
77、8、基于激光传感器的机械式水表智能检定装置还包括:用以约束智能水表的轮廓的托板,确保智能水表的轮廓在一定范围内,以保证第三采集器可完整获取智能水表的外轮廓,托板底部设有延长板,在所述托板中设有第三电机,第三电机通过螺纹杆与所述外壳开设有所述采集孔的侧壁相连,用以控制采集单元与智能水表的距离,在确保可完整获取智能水表的外轮廓的同时,进一步确保了采集图像的清晰度,延长板上平行设有若干导轨,外壳通过支撑件与各导轨相连,在确保外壳沿预设路径移动的同时进一步提高了图像采集的稳定性。
78、9、中控单元根据表盘信息的清晰度控制所述第三电机将所述外壳与所述托板的水平距离调节至对应值,在确保采集图像清晰度的同时,进一步提高了采集器对智能水表表盘信息采集的精确度
- 还没有人留言评论。精彩留言会获得点赞!