基于环境信息的室内非视距场景无源标签三维定位方法
本发明涉及无线通信,更具体的说,本发明涉及一种基于环境信息的室内非视距场景无源标签三维定位方法。
背景技术:
1、随着通信技术的发展,5g 技术已经逐步走向成熟,研究者们逐渐将目光聚焦于6g技术的研究中,技术的发展将带来了海量的设备数与流量,在众多的设备间建立起通信连接,这种趋势在物联网场景中尤为明显。在物联网的应用中,位置信息是一个非常重要实用的数据,定位技术作为获取位置信息的关键技术,受到了广泛的研究和关注,其不仅给人们的日常工作生活提供方便,还在救援救灾、智能交通、物流管理等领域发挥着重要作用。
2、在室内环境下,由于 gps 信号弱,且环境复杂,目前还没有非常完善的室内定位技术。然而在室内空间空前庞大的今天,各个工厂车间、购物商场、办公楼、地下交通的不断建设,基于室内的定位技术显得越发重要,人们对室内环境中的定位需求与日俱增。
3、现有的关于反向散射定位的研究主要集中于估计所需的定位参数,如基于时间信息的 toa(time of arrival)和 tdoa(time difference of arrive)参数,基于接收信号强度的 rssi(received signal strength indicator)和基于到达角度的 aoa(angle ofarrival),然后直接通过几何方法计算出标签的位置,或者在获得定位参数后使用特征匹配的方法进行定位。
4、然而,基于 rssi 的方法对信道衰落与干扰十分敏感,在信道条件较差的室内场景中,其定位精度会受到很大的影响。使用基于aoa估计的定位方法对于环境要求比较严格,信号传播的信道需要具有很强的视距 (line-of-sight,los)径分量而不能有过强的非视距(non-light-of-sight,nlos)径分量。在室内场景下,通常会存在很多障碍物的干扰,因此,需要实现一种在非视距路径情况下的可靠,高精度的室内反向散射定位方法。
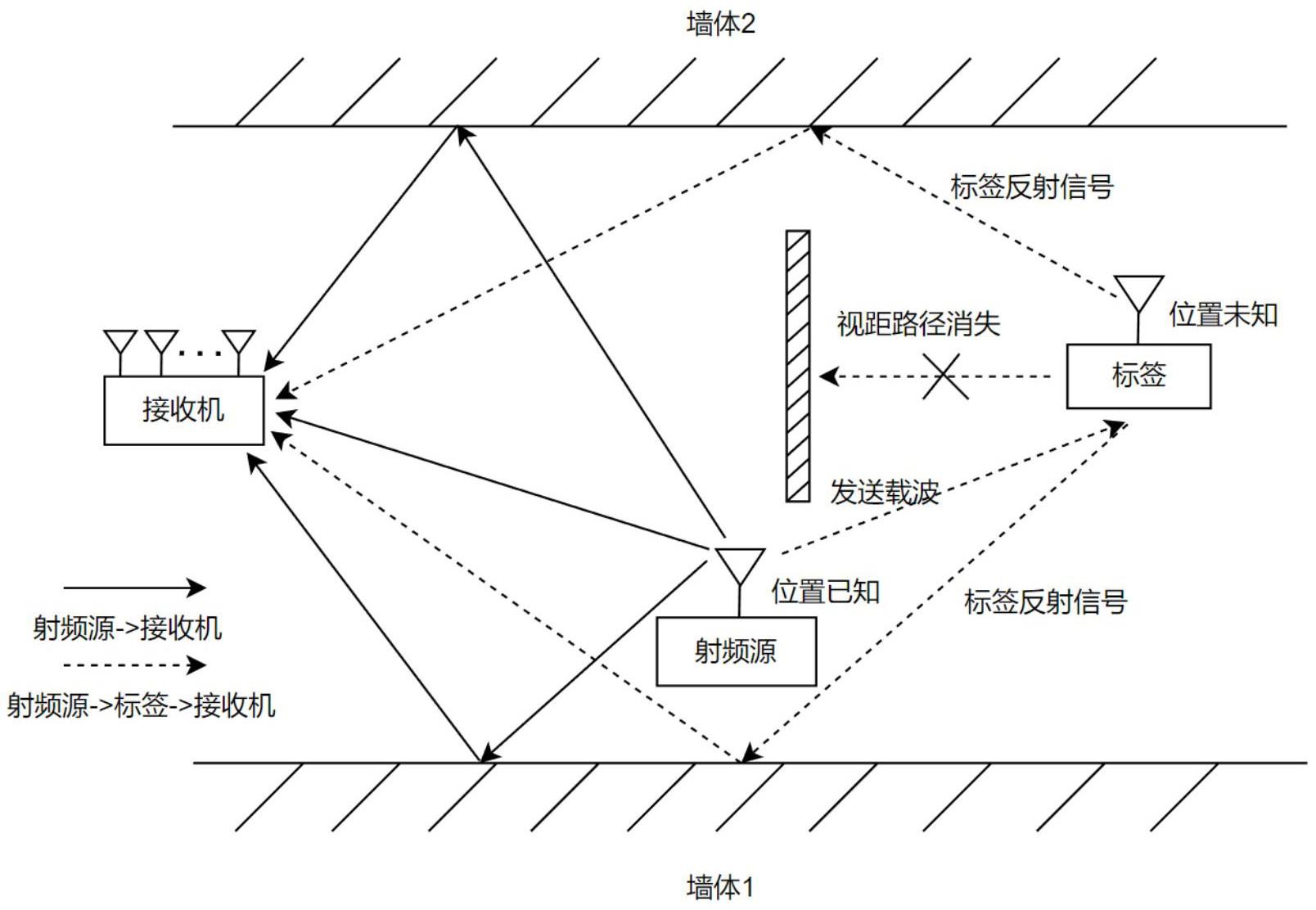
5、在实际室内场景中,存在许多反射体,使接收到的信号实际上是多路反射信号相加的多径信号,使得理论接受信号与实际存在偏差,其中最主要的反射信号来源于墙体的反射。获得反射体的信息有利于消除多径信号的影响,并进一步辅助进行定位。常用的基于子空间的多信号分类算法(multiple signal classification,music)在非视距情况下容易受到由于多径效应产生的相干信号的影响。因此,对于非视距下的室内反向散射定位场景,需要实现一种基于空间平滑的高精度、高分辨率的到达角估计与反射体计算方法。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种基于环境信息的室内非视距场景无源标签三维定位方法,解决了非视距场景下传统定位方法精度差的问题。
2、本发明解决其技术问题所采用的技术方案是:一种基于环境信息的室内非视距场景无源标签三维定位方法,其改进之处在于,该方法包括以下的步骤:
3、s10、探测阶段,tag未激活,此时仅存在射频源与接收机之间的链路;接收机通过二维空间平滑算法对来自射频源的多径接收信号进行处理,该接收信号为相干信号;
4、s20、根据接收到的信号估计出经过反射的墙体位置信息,获取室内场景的环境信息;
5、s30、射频源提高功率以激活tag,此时接收机接收到来自射频源的信号和来自tag反射的信号,tag到接收机的信号包括nlos径的信号和可能存在的los径的信号;
6、接收机减去射频源的信号,单独对来自tag的信号进行处理;接收机将接收的信号在时间维度上取多个快照;
7、s40、根据接收信号进行角度估计,联合环境信息对tag进行准确定位。
8、进一步的,所述的步骤s40包括:
9、s401、对接收机获得的k路多径相干信号,沿方位维和俯仰维等间距划分为多个子面阵,对每个子面阵单独进行向量化,并分别进行前向、后向平滑,将所有子面阵的平滑结果取平均得到前向协方差矩阵和后向协方差矩阵;
10、s402、获得双向空间平滑协方差矩阵:;
11、s403、对双向空间平滑协方差矩阵进行特征值分解,计算其空间谱:
12、;
13、式中,为方位角是,俯仰角是时的导向矢量,为协方差矩阵特征向量所张成的噪声子空间;
14、s404、取空间谱中的k个峰值,获得所估计多路信号的到达角度;
15、s405、结合估计的方位角与俯仰角信息,得到入射信号对应的墙体;
16、s406、根据墙体位置信息与入射角度,可得到对应tag的可能轨迹,通过两个入射角度的信息,运用几何法对tag进行准确定位。
17、进一步的,步骤s10中,通过位置已知的射频源发送信号,用于环境探测,其发送功率低于tag的激活门限,接收机接收由射频源发射的信号时,tag不反射信号;
18、接收机接收的信号包括直射路径的信号和经过墙体反射的信号,假设环境中有k条路径,接收信号的公式为:
19、;
20、其中,为第k条路径的路径损耗,表示第k个入射信号的导向矢量,为入射信号,为第k个入射信号的传播距离,为入射信号的波长,为高斯白信号。
21、进一步的,接收的信号是由同一发射源经过多条反射路径组成的多径信号,多个入射信号之间具有强相关性,采用面阵二维空间平滑算法对接收信号进行去相关,包括以下步骤:
22、s101、对于方向维为,俯仰维为的面阵,在两个维度上将其划分为相互交错的子阵列,假设方向维上分了个子阵列,俯仰维划分了个子阵列,则子阵列地大小为列、行;
23、其中第个子阵列的阵元选择矩阵表示为:
24、;
25、;
26、;
27、;
28、其中,和分别为前向空间平滑时第个子阵列的方向维和俯仰维的阵元选择矩阵,和分别为后向空间平滑时第个子阵列的方向维和俯仰维的阵元选择矩阵,为的单位矩阵,为反对角线元素为1,其余元素为0的的矩阵;
29、s102、根据阵元选择矩阵求出每一子阵列的前向、后向协方差矩阵、,则原始数据的前向、后向及双向空间平滑后的协方差矩阵分别为:
30、;
31、;
32、;
33、对进行特征值分解,计算其二维空间谱:
34、;
35、其中,为噪声子空间;
36、s103、通过搜索二维空间谱得到最大的k个峰值,即可得到k个相干信号的入射方位角和入射俯仰角。
37、进一步的,所述步骤s20中,根据得到的入射方位角、入射俯仰角以及接收机和射频源的位置,结合镜像原理,得到对应的反射墙体的位置:
38、;
39、;
40、;
41、其中,为天顶上的墙体坐标,为垂直于y轴的墙体坐标,为垂直于x轴的墙体坐标,为信号经过天顶上的墙体反射的入射俯仰角,为信号经垂直于y轴的墙体反射的入射方位角,为信号经垂直于x轴的墙体反射的入射方位角。
42、进一步的,所述的步骤s30中,通过射频源发送信号用于激活tag,发送功率应大于tag的激活门限;
43、若tag与射频源之间存在直射路径,可直接激活tag;
44、若tag与射频源之间不存在直射路径,增大发送功率以激活tag。
45、进一步的,当tag激活成功后,tag接收到的环境射频源信号为,其中,为信号从射频源传播至tag的衰落,为信号从射频源传播至tag的传播距离,设tag反射系数为,是一个复数,其幅值改变反向散射信号的幅度,相位改变反向散射信号的相位;
46、定义标签信号为,则标签向接收机发射的反向散射信号:
47、;
48、设标签反射信号存在p条传播路径,则接收机接收到的来自tag的多径信号为:
49、;
50、式中:表示第p条路径中反向散射信号至接收机的路径损耗,表示第p个入射信号的导向矢量,为第p个入射信号的传播距离,为tag反射信号的波长。
51、进一步的,接收机接收到的实际信号为来自射频源的多径信号,来自tag反向散射的多径信号和噪声信号之和,写为:
52、;
53、由于来自射频源的多径信号在探测阶段已知,可以从接收信号中消除来自射频源的信号,获得实际的tag反向散射信号:
54、;
55、接收的tag反向散射多径信号具有较强相关性,需要使用面阵二维空间平滑对接收信号进行去相关;
56、之后计算前后向空间平滑得到的协方差进行特征值分解,计算其空间谱函数,搜索二维空间谱得到最大的p个峰值,即可得到p个相干信号的入射方位角和俯仰角。
57、进一步的,对tag进行准确定位包括:
58、假设信号经过了天顶上的墙体和垂直于轴的墙体两个反射体反射,不存在los径;接收机根据接收到的多条路经的aoa信息,结合反射墙体位置和镜像几何原理,推导出下列公式:
59、;
60、整理可得:
61、;
62、;
63、;
64、由此可以得到nlos场景下位置未知tag的三维空间坐标,且仅需一个接收机即可完成;其中,,,分别为标签的三个坐标,为信号经过天顶上的墙体反射的入射方位角和俯仰角,为信号经垂直于x轴的墙体反射的入射方位角和俯仰角。
65、本发明的有益效果是:本发明可以有效的估计室内墙体的位置参数,获取了室内环境信息,并为室内反向散射定位提供帮助;提供了一种支持在室内非视距场景下进行物体定位的方案,根据获取到的反射体信息,接收机可以仅依靠nlos径对物体进行高精度的定位,解决了非视距场景下传统定位方法精度差的问题。
- 还没有人留言评论。精彩留言会获得点赞!