一种油动机伺服系统中LVDT位移传感器量程自动整定方法与流程
本发明涉及工业伺服控制系统的控制参数整定方法,具体是一种油动机伺服系统中的lvdt位移传感器有效量程的自动整定方法。
背景技术:
1、油动机伺服系统,是常见于汽轮机组、水电机组、工业制造等设备上的自动控制操作系统,其以脉冲油压驱使油动机产生相应的开合动作而执行控制指令。在油动机的伺服控制系统中,以lvdt位移传感器检测油动机的开度位移,伺服控制器根据lvdt位移传感器检测到的位移信号而对油动机进行半开环控制。由此可见,在油动机伺服系统中,lvdt位移传感器匹配于油动机开度的有效量程,直接关系着油动机半开环控制的可靠性。
2、在lvdt位移传感器与油动机匹配之前,lvdt位移传感器上的总量程与油动机的开度之间没有必然对应关系,这就需要将连接在一起的油动机和lvdt位移传感器,根据油动机的开度状态变化,而在lvdt位移传感器上找出对应的量程-即对应于油动机开度的有效量程。通常,在lvdt位移传感器上找出的有效量程,并非以总量程的起、终点作为基准,而是在总量程中选取线性较好的中间段来匹配油动机的开度,这就涉及lvdt位移传感器上的量程与油动机开度之间匹配关系的整定处理,通过整定零值和整定幅值而获得lvdt位移传感器对应油动机开度的有效量程。
3、目前,常见的油动机伺服系统中lvdt位移传感器量程的整定处理是,在油动机全关状态时获取lvdt位移传感器的对应位移信号数据作为零值,在油动机全开状态时获取lvdt位移传感器的对应位移信号数据作为幅值。此整定方法忽略了油压脉冲的不稳定性对lvdt位移传感器当前位移信号数据的波动影响,忽略了油动机在整定过程中可能发生卡阻故障对所获取量程的影响,亦忽略了lvdt位移传感器在整定过程中可能发生断线故障对当前位移信号数据的影响,从而导致所获取的整定零值和整定幅值较难真实地反映出油动机的对应开度,不能使油动机的开合范围可靠地匹配于lvdt位移传感器的最优有效量程,直接影响了油动机半开环控制的可靠性。
技术实现思路
1、本发明的技术目的在于:针对上述油动机伺服系统的特殊性,以及现有技术的不足,提供一种能够使油动机的开合范围可靠地匹配于lvdt位移传感器的最优有效量程的自动整定方法。
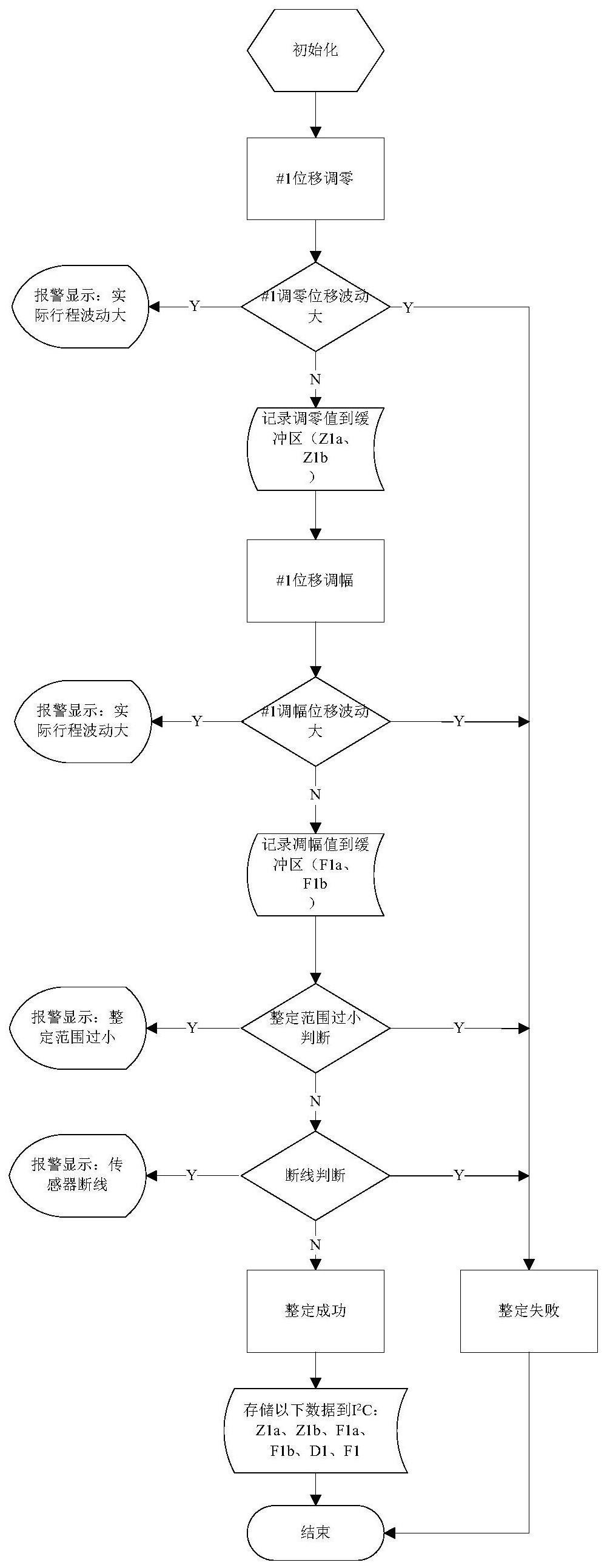
2、本发明的技术目的通过下述技术方案实现,一种油动机伺服系统中lvdt位移传感器量程自动整定方法,所述lvdt位移传感器量程自动整定方法包括调零整定过程、调幅整定过程和完成整定过程;
3、所述调零整定过程是:
4、伺服控制器向伺服阀输出调零控制信号,控制油动机接近全关状态时,动态获取lvdt位移传感器在当前位置的次一级线圈和次二级线圈的电压信号数据,将动态获得的多次次一级线圈和次二级线圈的电压信号数据进行波动判断处理;
5、若满足波动判断条件,则记录最新次次一级线圈和次二级线圈的电压信号数据,并进入调幅整定过程;
6、若未满足波动判断条件,则整定失败退出;
7、所述调幅整定过程是:
8、伺服控制器向伺服阀输出调幅控制信号,控制油动机接近全开状态时,动态获取lvdt位移传感器在当前位置的次一级线圈和次二级线圈的电压信号数据,将动态获得的多次次一级线圈和次二级线圈的电压信号数据进行波动判断处理;
9、若满足波动判断条件,则记录最新次次一级线圈和次二级线圈的电压信号数据,并进入完成整定过程;
10、若未满足波动判断条件,则整定失败退出;
11、所述完成整定过程是:
12、在存储器中,存入满足判断条件的调零记录次一级线圈和次二级线圈的电压信号数据、据调零记录次一级线圈和次二级线圈的电压信号数据获得的调零值、调幅记录次一级线圈和次二级线圈的电压信号数据、据调幅记录次一级线圈和次二级线圈的电压信号数据获得的调幅值;
13、整定成功退出。
14、上述技术措施针对于上述油动机伺服系统的特殊性,基于伺服控制器一键自动运行功能而控制油动机处于接近全关/接近全开的状态,在对应状态之下,动态多次获取lvdt位移传感器在当前位置的次一级线圈和次二级线圈的电压信号数据,将动态多次获得的这些电压信号数据,经波动判断处理而获得能够基本真实、稳定地反映油动机当前开度状态的整定值,从而基本消除整定值与油动机真实开度之间的可能误差,使所获取的整定零值和整定幅值能够基本真实地反映出油动机的对应开度,尽可能的使油动机的开合范围可靠地匹配于lvdt位移传感器的最优有效量程,精确性高,有利于提高油动机半开环控制的可靠性。
15、作为优选方案之一,所述lvdt位移传感器量程自动整定方法还包括有整定范围过小判断过程;
16、所述整定范围过小判断过程是:
17、获取调零记录的次一级线圈和次二级线圈的电压信号数据,求差获得过程调零值;
18、获取调幅记录的次一级线圈和次二级线圈的电压信号数据,求差获得过程调幅值;
19、将过程调幅值与过程调零值求差,将差值与设定值一比较,若差值大于设定值一则判定为整定范围正常、完成自动整定,否则判定为整定范围过小、整定失败退出;
20、所述设定值一的取值范围为800~1200。
21、上述技术措施对所获取的过程整定零值(即过程调零值)和过程整定幅值(即过程调幅值)进行整定范围过小判断,排除油动机在整定过程中可能存在的卡阻故障,以防油动机在整定过程中发生卡阻故障而对整定结果造成不利影响,进一步使所获取的整定零值和整定幅值能够基本真实地反映出油动机的对应开度,进一步尽可能的使油动机的开合范围可靠地匹配于lvdt位移传感器的最优有效量程。
22、作为优选方案之一,所述lvdt位移传感器量程自动整定方法还包括有断线判断过程;
23、所述断线判断过程是:
24、获取调零记录的次一级线圈和次二级线圈的电压信号数据,求和获得调零次级线圈电压信号数据和值;
25、获取调幅记录的次一级线圈和次二级线圈的电压信号数据,求和获得调幅次级线圈电压信号数据和值;
26、将调幅次级线圈电压信号数据和值与调零次级线圈电压信号数据和值求差,并将差值与设定值二比较,若差值小于设定值二则判定为接线正常、完成自动整定,否则判定为断线、整定失败退出;
27、所述设定值二的取值,小于调幅次级线圈电压信号数据和值与调零次级线圈电压信号数据和值之间差值的20%。
28、上述技术措施对lvdt位移传感器在整定过程中可能存在的断线故障进行排除,以防lvdt位移传感器在整定过程中发生断线故障而对整定结果造成不利影响,进一步使所获取的整定零值和整定幅值能够基本真实地反映出油动机的对应开度,进一步尽可能的使油动机的开合范围可靠地匹配于lvdt位移传感器的最优有效量程。
29、作为优选方案之一,所述波动判断处理是:
30、步骤1. 初始动态采集m次次一级线圈和次二级线圈的电压信号数据,m取值≥8;
31、将每一次次一级线圈和次二级线圈的电压信号数据求差处理,得到对应次的初始过程调零值/过程调幅值;
32、获得m组初始过程调零值/过程调幅值;
33、步骤2. 将m组初始过程调零值/过程调幅值,按照从小到大的顺序进行冒泡排序;
34、形成队列排序;
35、步骤3. 对队列排序中的最大值与最小值求差处理;
36、将差值与设定的对应波动阈值进行比较判断,若差值小于对应波动阈值则判定波动正常、完成波动判断,否则判定为波动过大、进入步骤4;
37、对应波动阈值的取值范围为300~500;
38、步骤4. 判定波动过大,则累加采集一次次一级线圈和次二级线圈的电压信号数据;
39、将当前累加采集的次一级线圈和次二级线圈的电压信号数据求差处理,获得当前累加过程调零值/过程调幅值;
40、步骤5. 将步骤4的当前累加过程调零值/过程调幅值,结合到步骤2的冒泡排序中;
41、形成新的队列排序;
42、步骤6. 对步骤5的队列排序中的最大值与最小值求差处理;
43、将差值与设定的对应波动阈值进行比较判断,若差值小于对应波动阈值则判定波动正常、完成波动判断,否则判定为波动过大、重复步骤4至步骤6;
44、步骤4至步骤6的重复次数≤80次,若达到最大重复次数仍判定波动过大,则整定失败退出。
45、上述波动判断技术措施,针对于油动机油压脉冲的特殊性,在油动机的对应开度状态之下,动态获得多组过程调零值/过程调幅值,将这些过程调零值/过程调幅值通过波动分析判断,从而筛选出能够基本真实、稳定地反映油动机当前开度状态的整定值,基本消除整定值与油动机真实开度之间的可能误差,提高整定精度。
46、作为优选方案之一,所述油动机接近全关状态,是指当前开度为有效开度的0.5~3%。
47、所述油动机接近全开状态,是指当前开度为有效开度的97~99.5%。
48、上述技术措施在油动机接近全关状态时获取调零值,在油动机接近全开状态时获取调幅值,从而使所获得lvdt位移传感器的有效量程合理地略小于油动机的有效开度,合理地留出富余控制量,以防油动机全关而油动机所控制调门(例如汽轮机调门)未关,以及以防油动机全开而油动机所控制调门未全开,提高油动机伺服控制的可靠性。
49、作为优选方案之一,所述获取lvdt位移传感器的每一次次一级线圈和次二级线圈的电压信号数据为优选电压信号数据,按如下方式采集获取:
50、在采集时间段内,采集对应次级线圈的多组电压信号数据;
51、将采集到的、对应次级线圈的多组电压信号数据,按照从小到大的顺序进行冒泡排序;
52、将对应次级线圈队列排序中的偏小和偏大的电压信号数据过滤掉,摘取中间段的多组电压信号数据,将这些摘取的中间段电压信号数据求平均值处理,获得对应次级线圈的优选电压信号数据。
53、上述技术措施针对于油动机伺服系统的特殊性,使每次采集到lvdt位移传感器的次一级线圈和次二级线圈的电压信号数据为优选数据,有效消除油动机在当前执行时刻,因脉冲油压的执行抖动而对lvdt位移传感器所采集信号数据的干扰影响,基本消除采集值与实际值之间的可能误差,提高电压信号数据采集精度,进而有利于提高量程整定精度。
54、进一步的,所述优选电压信号数据获取的采集时间段≤20ms,采集周期随动于伺服控制器的程序执行循环周期;
55、同一采集时间段内的前、后次采集电压信号数据的间隔时间为15~25μs;
56、所述采集时间段内,采集对应次级线圈的电压信号数据为8~14组;
57、所述对应次级线圈队列排序中,摘取的中间段电压信号数据为4~8组。
58、上述技术措施基于伺服控制器的常见模拟量采集芯片(ads8320e芯片)的采集速度,以及数据处理能力,在允许条件下尽可能快的采集,从而有利于精准获取油动机的真实位移信号,获取的优选电压信号数据尽可能的精确,受执行抖动的干扰影响小。
59、作为优选方案之一,所述油动机连接的lvdt位移传感器为相对独立、形成冗余配置的两支;
60、所述lvdt位移传感器为六线制结构。
61、上述技术措施针对于汽轮机组的油动机伺服系统对运行稳定性的技术要求,通过两支lvdt位移传感器在油动机上的冗余配置,能够有效确保油动机的半开环控制稳定、可靠地实现。所采用的lvdt位移传感器具有体积小、精度高、性能稳定、可靠性好、寿命长等技术优势。
62、本发明的有益技术效果是:上述技术措施针对于上述油动机伺服系统的特殊性,基于伺服控制器一键自动运行功能而控制油动机处于接近全关/接近全开的状态,在对应状态之下,动态多次获取lvdt位移传感器在当前位置的次一级线圈和次二级线圈的电压信号数据,将动态多次获得的这些电压信号数据,经波动判断处理而获得能够基本真实、稳定地反映油动机当前开度状态的整定值,辅以对整定过程中油动机可能卡阻故障及lvdt位移传感器可能断线故障的排除,基本消除整定值与油动机真实开度之间的可能误差,使所获取的整定零值和整定幅值能够基本真实地反映出油动机的对应开度,尽可能的使油动机的开合范围可靠地匹配于lvdt位移传感器的最优有效量程,精确性高,有利于提高油动机半开环控制的可靠性。
- 还没有人留言评论。精彩留言会获得点赞!