一种GNSS相对定位半参数估计的时间差分载波相位增强方法
本发明属于卫星定位系统领域,具体涉及一种gnss相对定位半参数估计的时间差分载波相位增强方法。
背景技术:
1、复杂环境中gnss定位易受系统误差干扰(如多路径误差、残余对流层延迟、电离层延迟等),最小二乘、附加系统参数模型、kalman滤波等传统的参数模型未顾及系统误差从而导致估计精度下降。半参数模型比传统参数模型引入更多的变量,有利于抑制gnss系统误差影响从而获得更好的解算结果。然而,半参数模型由于待估参数多,系统误差与基本参数间耦合度较高,容易发生病态问题。
2、现有解决半参数估计的病态问题的方法主要有以下几类:
3、第一类方法:引入外部增强
4、引入的外部信息包括纯数学上的正则化,还有除了系统误差的光滑性之外的一些先验信息。文献[1]指出利用半参数自适应滤波算法,处理开窗动态数据,可削弱非高斯有色噪声的影响,增加正则化技术,克服了核估计方法容易过拟合非参数分量的缺点。文献[2]指出结合半参数估计和正则化估计的同时补偿状态模型和观测模型,并通过计算光滑因子、正则化矩阵和窗口宽度等,降低了模型参数选取的经验依赖性。文献[3]指出gnss双差相位的残余系统误差通常在零附近变化,利用相对定位残余系统误差的幅度先验信息作为带权的虚拟观测提高解的稳定性。
5、第二类方法:减少虚假变量
6、文献[4]指出传统的系统误差处理方法假设系统误差必定存在,然而系统误差可能只存在于部分观测。对于不含系统误差的情况,增加额外参数进行吸收不但加重了计算负担,还会增加模型的不稳定性,因此可先对系统误差进行显著性检验,仅当系统误差显著时进行处理。
7、半参数模型中的系统误差变量(非参数部分)与基本变量间的耦合程度较高,非参数部分的可估性弱,导致半参数模型的求解难度较大。对于动态定位情况,一方面移动窗口内的样本较少,另一方面坐标随时间变化,将与非参数分量高度耦合,因此半参数估计将更容易病态甚至秩亏[5][6]。
8、[1]曹轶之. 非高斯/非线性滤波算法研究及其在gps动态定位中的应用 [d]. 河南; 解放军信息工程大学, 2012.
9、[2]刘也, 余安喜, 朱炬波, 唐歌实. 基于弹道目标实时跟踪中的滤波方法综述[j]. 宇航学报,
10、[3]yu w, ding x, dai w, chen w. systematic error mitigation in multi-gnss positioning based on semiparametric estimation [j]. journal of geodesy,2017, 91(12): 1491-1502
11、[4]li b, zhang z, shen y, yang l. a procedure for the significancetesting of unmodeled errors in gnss observations [j]. journal of geodesy,2018, 92(10): 1171-1186.
12、[5]孙海燕, 吴云. 半参数回归与模型精化 [j]. 武汉大学学报(信息科学版),2002, 27(2): 172-174+207.
13、[6]hu h. ridge estimation of a semiparametric regression model [j].journal of computational and applied mathematics, 2005, 176(1): 215-222.
技术实现思路
1、针对半参数估计中系统误差与基本状态量耦合度较高而导致解算不稳定的问题,本发明提供一种基于时间差分载波相位与半参数估计的gnss相对定位方法,利用tdcp(time differenced carrier phase,时间差分载波相位)对半参数模型定位解算进行增强,减少待估未知数,削弱缓变系统误差,可高精度地估计坐标增量,同时削弱系统误差的影响从而提高估计的稳定性。
2、为实现上述技术目的,本发明采用如下技术方案:
3、一种基于时间差分载波相位与半参数模型的gnss相对定位方法,包括:
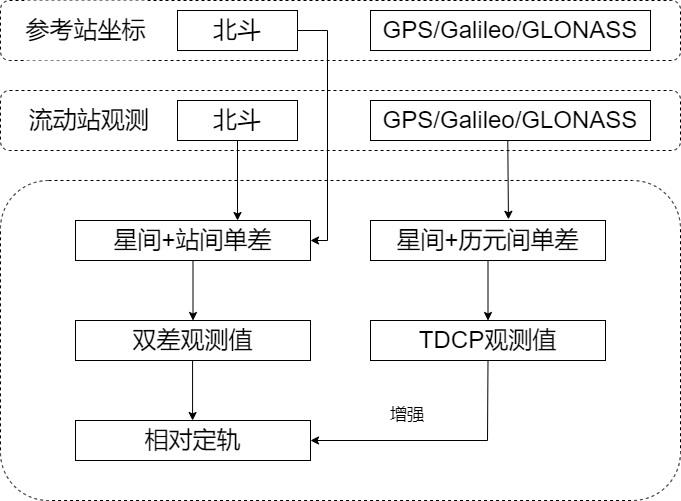
4、对站点的gnss观测数据进行星间单差,构建包括系统误差半参数和坐标参数的站点星间单差相位观测方程;
5、在站点星间单差相位观测方程的基础上,进一步对测站和参考站的星间单差进行差分,得到星间与站间双差相位观测方程;
6、在站点星间单差相位观测方程的基础上,进一步对前后历元的星间单差进行差分,并忽略其中历元间的系统误差变化和线性化误差变化,得到星间单差的历元间差分相位观测方程;
7、利用基于非北斗卫星观测数据建立的星间单差的历元间差分相位观测方程,对基于北斗卫星观测数据建立的星间与站间双差观测方程进行增强求解,即得到系统误差以及测站待定位的坐标参数。
8、进一步地,所述包括系统误差半参数和坐标参数的站点星间单差相位观测方程,表示为:
9、;
10、其中,为站点的时刻卫星和卫星的星间单差相位观测值,为相应的坐标项系数,和为站点在时刻坐标改正数向量和坐标近似值向量,为载波波长,为整周模糊度,为站点在时刻系统误差,为站点在时刻的观测噪声。
11、进一步地,所述星间与站间双差相位观测方程,表示为:
12、
13、其中,为时刻站点和站点之间对卫星和卫星形成的双差观测值,为相应的坐标项系数,和为站点在时刻坐标改正数向量和坐标近似值向量,为载波波长,为双差整周模糊度,为时刻系统误差,为时刻观测噪声。
14、进一步地,所述忽略历元间的系统误差变化(即)和线性化误差变化(即),并设置,得到星间单差的历元间差分相位观测方程,表示为:
15、
16、进一步地,在对基于北斗卫星观测数据建立的星间与站间双差观测和非北斗卫星观测建立的星间单差的历元间差分观测一起求解时,观测方程表示为:
17、
18、其中,、、、、、、分别为观测向量、设计矩阵、参数向量、系统误差向量、观测误差向量、单位权方差因子和权阵;和分别是观测数和待估参数个数;和分别是期望和方差算子;
19、然后向上述历元的星间与站间双差相位观测方程中,加入系统误差的先验信息:
20、
21、其中、、和分别是系统误差虚拟观测的观测向量、设计矩阵、观测误差向量和权阵,;表示协方差算子;系统误差的虚拟观测包括光滑先验信息和幅度信息,写作:
22、
23、其中是根据历史残差信息并基于现有非参数光滑方法得到的当前历元系统误差的预测;为单位阵;是光滑虚拟观测的权因子,为系统误差的平滑因子;是事先给定的对称正定阵;代表系统误差的先验幅度。
24、进一步地,非北斗卫星包括gps、galileo和/或glonass系统的卫星。
25、有益效果
26、本发明通过时间差分载波相位对载波观测做历元间单差,研究时间差分载波相位与坐标增量函数关系的构建;并研究时间差分载波相位对gnss相对定位半参数估计的增强策略,实现时间差分载波相位辅助半参数估计,减少模糊度等待估参数的同时,削弱系统误差的影响。其中:
27、(1)本发明通过tdcp对载波观测做历元间单差,完成tdcp与坐标增量函数关系的构建,可以消除模糊度、硬件偏差、系统间时间偏差等常量,同时削弱缓变系统误差,可高精度地估计坐标增量,换算为平均速度,可达mm/s级精度。
28、(2)本发明实现tdcp对半参数估计的增强策略,包括如何选取流动站的部分星间单差观测值,组成tdcp(星间单差消除了接收机钟差)的策略,剩余卫星的观测仍旧组建双差并加入非参数分量吸收系统误差,最后实现tdcp辅助半参数估计。对tdcp增强的研究有望减少待估未知数(模糊度和系统误差),同时削弱系统误差的影响从而提高估计的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!