一种基于复杂干扰下的多基浮标融合检测方法和系统与流程
本发明涉及目标,特别是一种基于复杂干扰下的多基浮标融合检测方法和系统。
背景技术:
1、在当前复杂海战环境下,由于潜艇等水下目标隐蔽性能的提高、机动性能的增强、水文环境的复杂性以及声纳武器对抗性能的日益完善,使得基于单平台、单基地的水下检测跟踪性能不足,且单基地声纳作为收发合置的主动声纳时容易暴露自身位置,这就促使多基地探测成为反潜探测新体制,多基地声纳探测系统中各探测节点收发分置,隐蔽性优于合置节点,且多节点协同探测相比单节点探测,通过合理的基站配置,可扩大探测范围,通过融合多节点获得的目标状态信息,可提高水下目标的检测概率和定位精度,因此利用多基地声纳系统进行目标检测跟踪是当前水下目标检测跟踪技术的发展趋势。
2、常规的分布式多基地声纳系统在各单基站检测时采用匹配滤波技术,但由于多基地声纳收发分置容易导致直达波干扰,再加上复杂海洋环境中的多途干扰等使得匹配滤波检测不准,再进行多基融合检测时更容易产生漏检或虚警的情况,从而导致系统的检测性能下降,并且传统的融合未考虑各基站局部判决对融合中心判决的贡献大小。
技术实现思路
1、鉴于此,本发明提供一种基于复杂干扰下的多基浮标融合检测方法和系统,以解决上述技术问题。
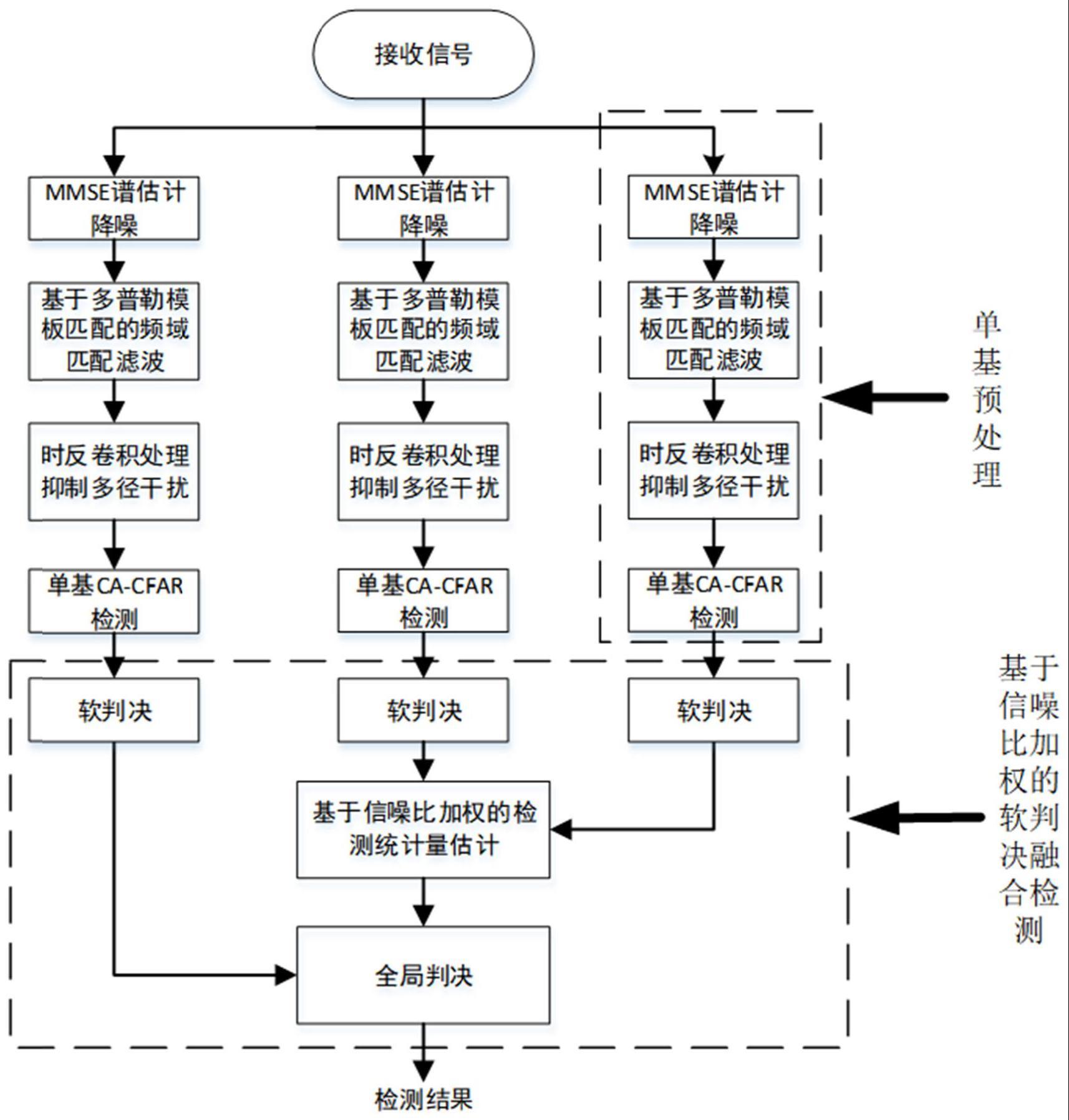
2、本发明公开了一种基于复杂干扰下的多基浮标融合检测方法,其包括:
3、对接收信号进行预处理,得到目标检测的门限值;
4、结合所述门限值,基于信噪比加权的软判决进行融合检测;
5、所述预处理包括:mmse谱估计降噪、基于多普勒模板匹配的频域匹配滤波、时反卷积处理和目标单元平均恒虚警率检测。
6、进一步地,对接收信号进行mmse谱估计降噪,包括:
7、将接收信号经过预加重、分帧、加窗处理;
8、将时域分帧信号经过短时傅里叶变换后得到能量频谱:
9、估计背景噪声功率谱、后验信噪比及先验信噪比;
10、计算增益函数,并估计信号频谱;
11、相位恢复及反傅里叶变换,得到时域信号估计;
12、将各段时域信号进行组合,输出降噪处理后的信号及等效信噪比。
13、进一步地,所述能量频谱为:
14、p(k)=|x(k)|=|fft(x(n))|
15、其中,x(n)=s(n)+d(n)为接收信号,其属于时域分帧信号,s(n)为待检测纯净信号,d(n)为噪声;
16、所述估计背景噪声功率谱、后验信噪比及先验信噪比,包括:
17、选取无信号到达的前几帧为背景噪声,估计其功率谱λd(k)=e{|d(k)|},并估计后验信噪比γk和先验信噪比ξk:
18、
19、
20、其中,λd(k)为若干段无信号到达时的噪声方差均值,m是信号分段序列,a为系数。
21、进一步地,所述计算增益函数,并估计信号频谱,包括:
22、增益函数表达式为:
23、
24、
25、其中,gk为增益函数,γ(·)是gamma函数,i0(·)和i1(·)分别表示零阶和一阶贝叶斯函数;
26、每段信号的频谱估计由下式获得:
27、
28、其中,为每段信号的频谱估计;
29、所述时域信号估计为:
30、
31、其中,θk是从带噪信号中获得;
32、所述降噪处理后的信号的等效信噪比为:
33、
34、其中,m是信号分段数。
35、进一步地,对降噪处理后的信号进行基于多普勒模板匹配的频域匹配滤波,包括:
36、分别在频域对降噪处理后的信号作匹配滤波处理,输出为:
37、
38、其中,ξi对应不同多普勒频偏。
39、进一步地,对匹配滤波器的输出进行时反卷积处理,包括:
40、将匹配滤波器的输出进行时反转卷积处理,即
41、ty(ω)=y(-ω)*y(ω)
42、将ty(ω)通过干扰抑制门,以剔除主要的噪声干扰:
43、y(ω)=ty(ω)·i(ω)
44、其中,
45、将y(ω)经过傅里叶逆变换,最终输出时域信号为:
46、y(n)=ifft(y(ω))
47、对y(n)进行目标单元平均恒虚警率检测,包括:
48、设置m个参考单元,估计参考窗内的干扰噪声功率水平,并乘以门限系数λ=pfa-1/m-1获得门限值t。
49、进一步地,所述结合所述门限值,基于信噪比加权的软判决进行融合检测,包括:
50、各单基站采用三级判决门限,t2<t<t1,即将观测空间和分别继续划分为2部分,其中满足满足软判决规则为:
51、
52、融合中心接收到各基站的判决数据后,通过估计检测统计量与检测门限,实现最终的判决。
53、进一步地,所述结合所述门限值,基于信噪比加权的软判决进行融合检测,具体包括:
54、根据各基站的虚警概率、接收信号处理信噪比、参考单元,求得三级门限系数;
55、各单基站依据软判决规则对目标进行判决;
56、计算融合中心检测统计量及门限值;
57、融合中心利用计算出的检测统计量与检测门限做出最终判决。
58、进一步地,所述三级门限系数分别为:
59、λ=pfa-1/m-1
60、λ1=2-1/m(η+pfa-1/m)-(1+η),η=100.1·snr
61、λ2=((1+pfa)/2)-1/m-1
62、各基地将单元平均恒虚警率估计出的干扰噪声功率水平分别乘以系数λ、λ1、λ2,获得三级门限值;
63、所述各单基站依据软判决规则对目标进行判决,即
64、
65、并将对应判决数据及接收信号处理信噪比信息传输至融合中心。
66、进一步地,所述计算融合中心检测统计量及门限值,包括:
67、融合中心的检测统计量是各基站判决值的加权,通过引入门限系数λ3、λ4对各基站判决值对应的数据进行估计,即λ3=αλ1、λ4=αλ2,α是给定的参数,则判决值对应的数据可估计为:
68、
69、融合中心的检测统计量可估计为其中,n为基站个数,βi(k)为第i个基站第k次判决的权值;
70、在每次融合判决时,融合中心均会更新各基站的权值,即:
71、
72、
73、其中,ηi(k)表示第i个基站第k次判决的信噪比,βi(0)=1,并且
74、融合中心的判决门限可估计为:其中,ti为各基站cfar检测获得的门限。
75、本发明还公开了一种适用于上述所述的基于复杂干扰下的多基浮标融合检测方法的系统,所述系统包括:
76、预处理模块,用于对接收信号进行预处理,得到目标检测的门限值;所述预处理包括:mmse谱估计降噪、基于多普勒模板匹配的频域匹配滤波、时反卷积处理和目标单元平均恒虚警率检测;
77、融合检测模块,用于结合所述门限值,基于信噪比加权的软判决进行融合检测。
78、由于采用了上述技术方案,本发明具有如下的优点:本发明基于分布式多基浮标,对目标进行收发分置的主动探测,通过在各单基站采用mmse信号增强技术、多普勒模板匹配技术、时反卷积干扰抑制技术等预处理,实现单基站在复杂干扰下的目标局部软判决检测,再通过信噪比加权融合检测大大提高检测性能,以及在复杂海洋噪声背景下的泛化性和鲁棒性,可广泛应用于浮标、uuv、舰船等基站平台的分布式多基系统,为作战及民用应用提供精确的目标探测信息。
- 还没有人留言评论。精彩留言会获得点赞!