一种无人值守智能称重系统的制作方法
本发明涉及汽车称重,特别涉及一种无人值守智能称重系统。
背景技术:
1、现阶段在我国,传统的称重系统还是完全依靠人工记录车辆信息、入库和出库货物重量、汇总单据等,且在承重过程中容易出现如下情况:一当车辆称重时,车辆停靠位置的确认依靠目测,不可避免地产生人为观测错误导致位置上的误差。二从人力消耗角度看,每个计量点都需要不间断值班,产生了大量的固定人工费用。
2、因此,本发明提出一种无人值守智能称重系统。
技术实现思路
1、鉴于传统称重系统的诸多不足,本发明提供了一种无人值守智能称重系统,全程通过自动化感应、监测及指示,实现对车辆位置的合理化调整,进而实现对车辆的有效称重,有效解决提出的人为观测导致的称量误差以及过大的人力消耗成本。
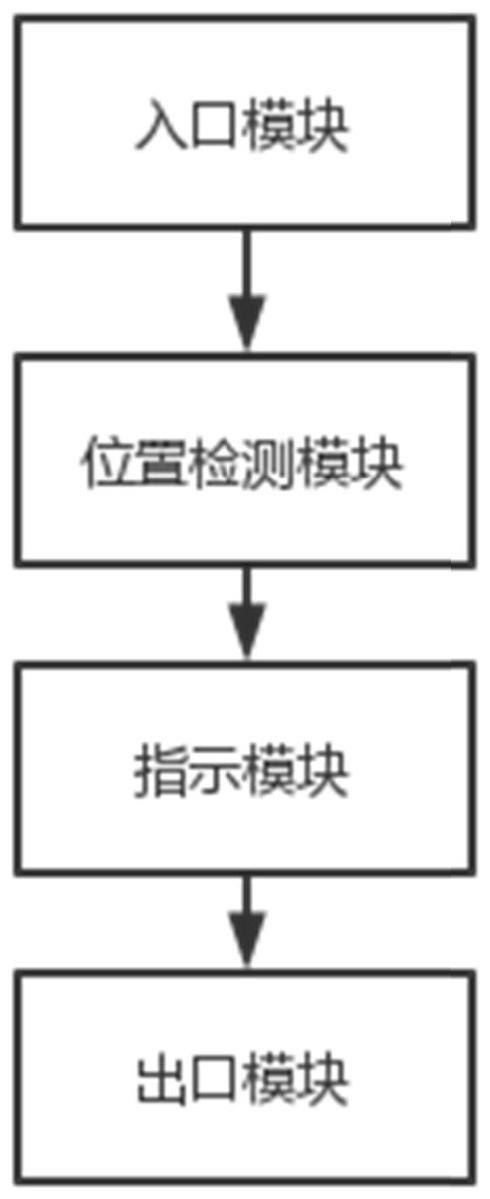
2、本发明采用了如下技术方案:一种无人值守智能称重系统,包括:
3、入口模块:当第一地感线圈检测到有待进入车辆时,提醒车辆刷卡进入,并在刷卡成功后,控制入口闸道打开;
4、位置检测模块:监测进入车辆基于汽车衡的停放位置,并将监测位置结果与标准位置结果进行比较,确定异常停放位置;
5、指示模块:根据异常-指示映射表,调取与所述异常停放位置匹配的指示内容,并对所述进入车辆的指示行为进行位置调整监测以及位置调整过程中的重量监测;
6、出口模块:当重量监测结果满足刷卡信息所对应的预设约束标准时,记录承重结果,并控制入口闸道关闭以及控制出口闸道打开,并根据第二地感线圈,记录车辆的离开时间。
7、优选的,一种无人值守智能称重系统,其入口模块,包括:
8、第一地感线圈:对车辆进行检测,当检测到有车辆经过时,向车牌识别单元发送工作信号;
9、车牌识别单元:接收到所述第一地感线圈传来的工作信号后,识别车牌信息;
10、无人值守智能单元:检测车牌信息是否在存储数据库中,若存在,则提醒进行自动刷卡处理;
11、道闸控制单元:自动刷卡成功后,控制入口道闸打开以及控制出口道闸关闭,提醒允许车辆进入。
12、优选的,一种无人值守智能称重系统,其入口模块,还包括:
13、记录单元:记录第一地感线圈在工作过程中的波动信号,并将工作过程中不同时刻下的波动信号转换为波动值,构建波动曲线;
14、矩阵构建单元:确定所述波动曲线的波动峰值、波动谷值、相邻波动峰值到波动谷值的第一时间间隔以及相邻波动谷值到波动峰值的第二时间间隔,构建波动矩阵b;
15、
16、其中,ft01表示t01时刻的波动峰值;ft0n1表示t0n1时刻的波动峰值;gt02表示t02时刻的波动谷值;gt0n1+1表示t0n1+1时刻的波动谷值;t02-t01表示第1个第一时间间隔;t0n1+1-t0n1表示第n1个第一时间间隔;t02-t03表示第1个第二时间间隔;t0n1+1-t0n1+2表示第n1个第二时间间隔;
17、输出单元:将所述波动矩阵输入到波动分析模型中,得到输出结果;
18、触发单元:当所述输出结果与检测到车辆经过有关时,触发车牌识别单元工作。
19、优选的,一种无人值守智能称重系统,其位置检测模块,包括:
20、监测单元:设置在汽车衡对角位置的摄像头:拍摄所述汽车衡上的第一方位图以及第二方位图,其中,第一方位图为进入车辆的后方方位图;第二方位图为进入车辆的前方方位图;
21、第一分布单元:将所述第一方位图与第一标准测图进行位置匹配分析,确定基于第一标准测图的第一位置点分布;
22、第二分布单元:将所述第二方位图与第二标准测图进行位置匹配分析,确定基于第二标准测图的第二位置点分布;
23、放置信息确定单元:根据所述第一位置点分布以及第二位置点分布,确定汽车衡上进入车辆的当前放置信息;
24、同时,从车辆数据库中获取与所述进入车辆的车辆型号一致的标准占位点;
25、数量比较单元:若所述第一位置点分布与第二位置点分布所对应的总位置点的分布是否在标准占位点构成分分布范围内,若是,判定所述进入车辆完全上磅;
26、否则,根据第一位置点分布与第二位置点分布所构成的实际占位点与标准占位点,确定异常停放位置。
27、优选的,一种无人值守智能称重系统,其入口模块,包括:
28、第一标定单元:基于所述异常停放位置,构建异常布局图,并根据前边轮胎的轮胎状态在所述异常布局图中进行第一标定以及根据后边轮胎的轮胎状态在所述异常布局图中进行第二标定;
29、位置延伸单元:按照车辆上磅方向以及第一位置点分布的分布轨迹,对第一位置点进行反方向位置延伸,同时,按照第二位置点分布的分布轨迹以及车辆上磅方向,对第二位置点进行正方向位置延伸;
30、第二标定单元:将所述反方向位置延伸在所述异常布局图中进行第三标定以及将所述正方向位置延伸在所述异常布局图中进行第四标定;
31、布局划分单元:基于第一标定结果、第二标定结果、第三标定结果以及第四标定结果,对所述异常布局图进行布局划分,来分别得到每个布局区域的异常序列;
32、内容获取单元:基于所述异常-指示映射表,获取与所述异常序列一致的指示内容;
33、内容调整单元:对所获取的所有指示内容,按照对应进入车辆的驾驶人员的驾驶行为习惯,对所有指示内容进行行为习惯调整,得到排序后的指示内容;
34、指示位置调整单元:按照排序后的指示内容,依次向所述进入车辆下发指示指令进行位置调整。
35、优选的,一种无人值守智能称重系统,其指示模块,还包括:
36、过程监测单元:实时监测每个指示内容进行位置调整的位置变化量以及重量变化量;
37、系数计算单元:根据所述位置变化量确定基于每个指示内容的位置修正量,同时,根据所述重量变化量,确定重量变化系数;
38、标准判断单元:判断所述位置修正系数与重量变化系数是否满足预设约束标准。
39、优选的,一种无人值守智能称重系统,其系数计算单元,包括:
40、修正集合构建块:构建位置修正集合:
41、
42、其中,w01j表示按照第j个指示内容进行位置调整后的所有修正位置;w02j表示第j个指示内容所对应的未修正之前的待修正位置;w1表示位置修正集合;表示按照第j个指示内容进行位置调整后的单独修正系数;
43、修正系数计算单元:计算位置修正系数x1:
44、
45、其中,∑w01j表示所有指示内容的总位置修正量;∑w02j表示所有指示内容所对应的待修正位置量;w1[n1/2],max表示对所有进行大小排序后获取前[n1/2]个单独修正系数进行累加得到的和;[]表示取整符号。
46、优选的,一种无人值守智能称重系统,其系数计算单元,还包括:
47、重量集合构建块:构建重量变化集合;
48、g1={g01j,j=1,2,...,n1}
49、其中,g01j表示按照第j个指示内容进行位置调整后的重量变化量;g1表示重量变化集合;
50、重量系数计算单元:计算重量变化系数x2;
51、
52、其中,max{g1}表示获取重量变化集合中的最大重量变化量;g01n1表示重量变化集合中的最后一个重量测量值。
53、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
54、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!