基线解算中浮点解的求解方法、装置及存储介质与流程
本发明涉及卫星导航定位,特别是涉及一种全球卫星导航中基线解算中浮点解的求解方法、装置及存储介质。
背景技术:
1、在卫星导航定位技术领域中,基线指的是两个卫星接收机在空间直角坐标系中的连线。基线是一条矢量线,其包含了这两个接收机连线的高度差信息和指向方位信息。基线解算就是计算这条矢量线。目前,全球卫星导航中基线浮点解解算的核心难点在于:多颗卫星构成的浮点解的法方程为病态矩阵,而求解法方程需要对法方程矩阵进行求逆。对于病态矩阵而言,如果该矩阵中的某一个变量发生了微小的变化如0.1%的变化,则这个矩阵的逆矩阵相应地会发生百倍千倍的变化。现有技术主要使用谱修正法、卡尔曼波法和正则化法等方法来求解上述浮点解的法方程;但是,在实际应用中浮点解的法方程经常出现20*20以上的矩阵,而上述现有技术的方法存在着极高的迭代次数、需要大量的迭代时间且解算精度下降等问题。
技术实现思路
1、本发明的实施例提供了一种全球卫星导航中基线解算中浮点解的求解方法、装置及存储介质,以实现对作为病态矩阵的浮点解法方程进行求解,从而提高基线解算中浮点解的计算准确度。
2、为了实现上述目的,一方面,提供一种基线解算中浮点解的求解方法,用于对两个卫星接收机间的基线进行解算,包括:
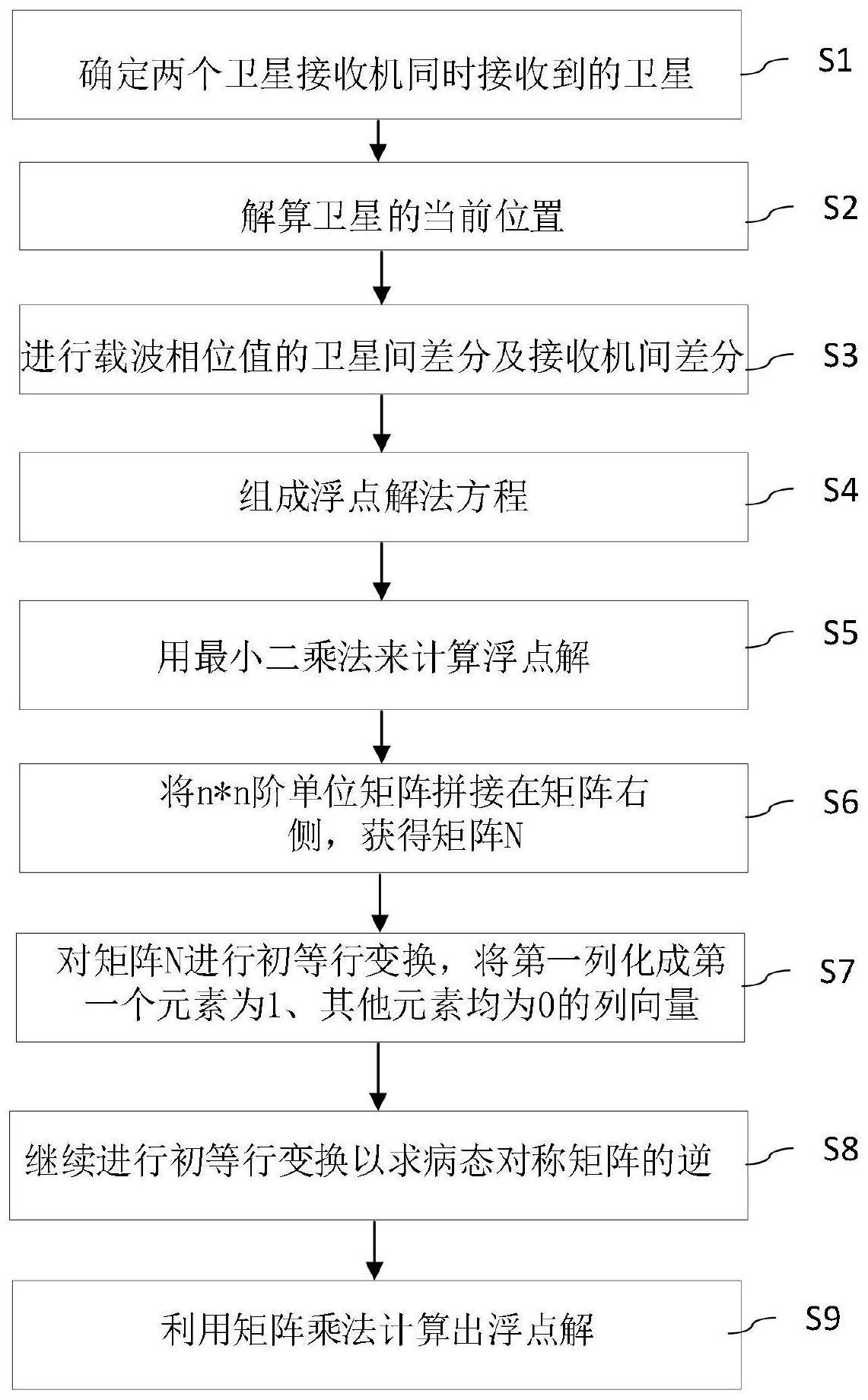
3、s1,确定两个卫星接收机同时接收到的卫星;
4、s2,解算步骤s1中所确定的卫星的当前位置;
5、s3,对步骤s1中确定的卫星进行载波相位值的卫星间差分及接收机间差分,获得载波相位差分值其中:
6、
7、其中,
8、
9、
10、其中,λ是波长,r是需要求解的基线三维坐标,x是需要求解的整周模糊度,是多次差分后的噪声,i、j、a和b均为正整数,a、b表示卫星接收机的编号,i、j表示卫星的编号;表示接收机a卫星i的载波相位值;表示接收机b卫星i的载波相位值;表示都能接收到卫星i的接收机a和接收机b的接收机间载波相位差分值;表示都能接收到卫星j的接收机a和接收机b的接收机间载波相位差分值;表示卫星i和卫星j之间的卫星间载波相位差分值;
11、s4,使用步骤s2解算的位置和步骤s3确定的载波相位差分值根据下述公式组成浮点解法方程:
12、δx=g-1b,其中δx是需要求解的r的浮点解,i为单位矩阵;
13、s5,利用最小二乘法通过如下公式来计算δx,其中(gtg)为n*n阶病态对称矩阵,n为正整数:
14、δx=(gtg)-1gtb;
15、s6,将n*n阶单位矩阵拼接在矩阵(gtg)右侧,获得矩阵n,其中:
16、n=[gtg i];
17、s7,对矩阵n进行初等行变换,将第一列化成第一个元素为1、其他元素均为0的列向量;
18、s8,继续进行初等行变换以求病态对称矩阵(gtg)的逆,包括:
19、s81,在进行每一次初等行变换操作时,判断第x行第x列的元素(x,x)的值是否为极小数,该步骤中x为2~n-1的正整数;如是,则在相同列中找对应元素值到不是极小数的元素(y,x),该步骤中y为x+1~n的正整数,通过将第x行加上第y行进行行变换,获得更新后的(x,x)值;及
20、s82,对消除极小数后的矩阵继续进行初等行变换,并获得病态对称矩阵(gtg)的逆(gtg)-1;
21、s9,利用矩阵乘法计算出浮点解δx:
22、δx=(gtg)-1gtb。
23、优选地,所述的方法,其中,当元素(x,x)的值的绝对值小于或等于1e-10时,判断出(x,x)的值为极小数;当元素(y,x)的值的绝对值大于1e-10时,判断出(y,x)的值不是极小数。
24、优选地,所述的方法,其中,步骤s7包括:
25、步骤s71,取矩阵n中的元素(1,1)和(2,1)的值,将第1行除以(1,1)的值,再将第2行减去第1行乘(2,1)的乘积;
26、步骤s72,根据步骤s71对矩阵n中接下来的每一行进行同样的操作,取(x,1)的元素值,将第x行减去第1行乘(x,1),该步骤中x为3~n的正整数。
27、优选地,所述的方法,其中,步骤s82包括:
28、s821,取更新后的(x,x)值,并将第x行除以(x,x)的值,再将第y行减去第x行乘(y,x)的乘积,该步骤中x为2~n-1的正整数,y为x+1~n的正整数,且对于每一次x的改变,y都必须取到x+1~n的所有正整数;
29、s822,取元素值(n,n),将第n行除以(n,n)的值,再将第x行减去第n行乘(x,n)的乘积,该步骤中x为n-1~1的正整数;
30、s823,将第y行减去第x行乘(y,x)的乘积,该步骤中x为n-1~2的正整数,y为x-1~1的正整数,且对于每一次x的改变,y都必须取到x-1~1的所有正整数;
31、s824,将完成上述初等变换之后获得的矩阵中的子矩阵(1∶n,n+1∶2n)拆分出来,子矩阵为病态矩阵(gtg)的逆矩阵(gtg)-1。
32、优选地,所述的方法,其中,在步骤s2之后,步骤s3之前,还包括使用如下条件中的一个或多个条件来筛选步骤s3要处理的卫星:
33、卫星的高度角满足预定的高度角条件;
34、卫星信噪比满足预定的信噪比阈值;
35、卫星的低层次测试结果满足预定的条件;
36、对卫星的载波相位进行二次求导获得的二次求导值小于预定的求导阈值。
37、优选地,所述的方法,其中,步骤s2中通过如下公式来解算卫星的当前位置(x,y,z):
38、x=xk*cos(w*t)+yk*sin(w*t)
39、y=-xk*sin(w*t)+yk*cos(w*t)
40、z=zk
41、其中,(xk,yk,zk)为根据卫星运动轨迹计算出的卫星发射时刻的位置,w为地球自转角速度,t为卫星信号传播时间。
42、另一方面,提供了一种基线解算中浮点解的求解装置,其中,包括存储器和处理器,存储器存储有至少一段程序,至少一段程序由处理器执行以实现如上文任一所述的方法。
43、又一方面,提供了一种导航定位装置,其中,包括存储器和处理器,存储器存储有至少一段程序,至少一段程序由处理器执行以实现如上文任一所述的方法。
44、又一方面,提供了一种计算机可读存储介质,该存储介质中存储有至少一段程序,至少一段程序由处理器执行以实现如上文任一所述的方法。
45、上述技术方案具有如下技术效果:
46、使用本发明实施例的方法来进行基线解算的浮点解求解时,在出现极小数时,通过去寻找符合要求的行即去寻找相同列中不是极小数的其他行,利用初等行变化的特性来修改出现极小数的那一行,避免了由于极小数的存在导致的病态矩阵求逆的问题,极大提高了基线解算的计算准确率。
- 还没有人留言评论。精彩留言会获得点赞!