数据的解析方法、装置、设备及存储介质与流程
本技术涉及数据处理技术,尤其涉及一种数据的解析方法、装置、设备及存储介质。
背景技术:
1、随着科技的发展,无人驾驶集卡车被广泛的应用在港口运输中,其可以采集地面上的数据,其中,数据包括雷达数据和多模态数据。通过对采集到的数据进行解析,并根据解析后的数据生成点云图,以供研究人员使用。
2、现有技术中,在对采集到的数据进行解析时,通常需要由人工将雷达数据和多模态数据分开,发送给对应的解析装置进行解析,最终得到对应的解析数据。
3、但是现有技术解析过程繁琐,解析速度慢,影响数据的解析效率。
技术实现思路
1、本技术提供一种数据的解析方法、装置、设备及存储介质,用以解决解析过程繁琐,解析速度慢,影响数据的解析效率的问题。
2、第一方面,本技术提供一种数据的解析方法,包括:
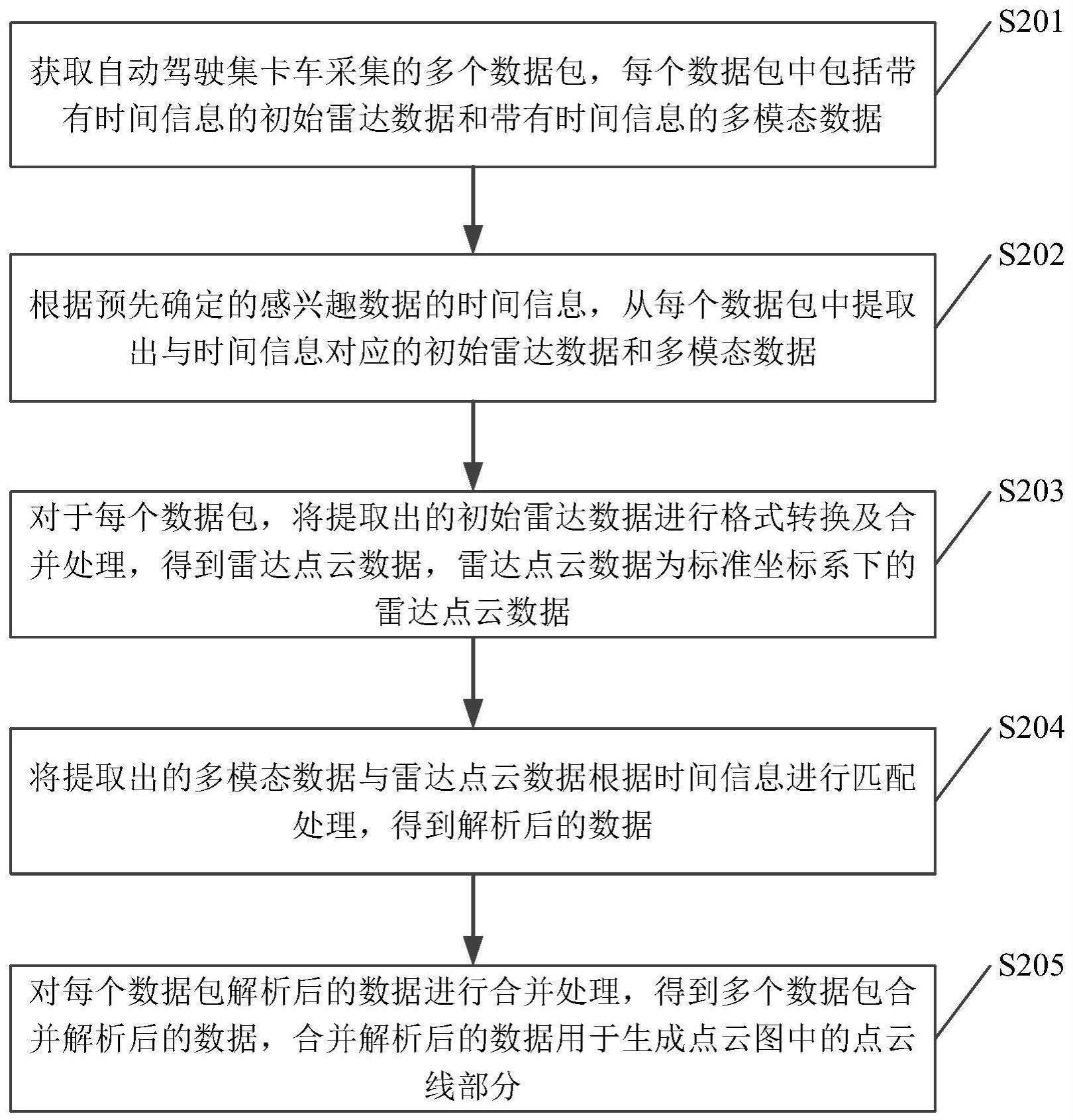
3、获取自动驾驶集卡车采集的多个数据包,每个数据包中包括带有时间信息的初始雷达数据和带有时间信息的多模态数据;
4、根据预先确定的感兴趣数据的时间信息,从每个数据包中提取出与所述时间信息对应的初始雷达数据和多模态数据;
5、对于每个数据包,将提取出的初始雷达数据进行格式转换及合并处理,得到雷达点云数据,所述雷达点云数据为标准坐标系下的雷达点云数据;
6、将提取出的多模态数据与所述雷达点云数据根据时间信息进行匹配处理,得到解析后的数据;
7、对每个数据包解析后的数据进行合并处理,得到所述多个数据包合并解析后的数据,所述合并解析后的数据用于生成点云图中的点云线部分。
8、可选的,所述初始雷达数据包括多个方位的初始雷达数据,每个方位的初始雷达数据对应独立的坐标系;
9、所述对于每个数据包,将提取出的初始雷达数据进行格式转换及合并处理,得到雷达点云数据,包括:
10、对每个方位的初始雷达数据进行反序列化处理,得到每个方位处理后的雷达数据;
11、对每个方位处理后的雷达数据进行坐标格式转换,得到标准坐标系下的每个方位的标准雷达点云数据;
12、对所述每个方位的标准雷达点云数据进行合并处理,得到整合后的雷达点云数据。
13、可选的,所述对每个方位处理后的雷达数据进行坐标格式转换,得到标准坐标系下的每个方位的标准雷达点云数据,包括:
14、获取所述自动驾驶集卡车的类型,所述自动驾驶集卡车的类型包括:带挂车的集卡车和不带挂车的集卡车;
15、根据所述自动驾驶集卡车的类型及每个方位预设的标定配置参数,生成每个方位对应的转换矩阵;
16、将所述每个方位处理后的雷达数据与每个方位对应的转换矩阵相乘,得到标准坐标系下的每个方位的标准雷达点云数据。
17、可选的,若所述自动驾驶集卡车的类型为带挂车的集卡车;
18、所述根据所述自动驾驶集卡车的类型及每个方位预设的标定配置参数,生成每个方位对应的转换矩阵,包括:
19、获取所述自动驾驶集卡车的挂车与车头的夹角数据、车身长度;
20、根据所述夹角数据、所述车身长度及所述每个方位预设的标定配置参数,生成每个方位对应的转换矩阵。
21、可选的,若所述自动驾驶集卡车的类型为不带挂车的集卡车;
22、所述根据所述自动驾驶集卡车的类型及每个方位预设的标定配置参数,生成每个方位对应的转换矩阵,包括:
23、根据所述每个方位预设的标定配置参数,生成每个方位对应的转换矩阵。可选的,所述对所述每个方位的标准雷达点云数据进行合并处理,得到整合后的雷达点云数据,包括:
24、获取每个方位的标准雷达点云数据的时间信息;
25、根据标准雷达点云数据的消息类型,确定主方位的标准雷达点云数据;
26、根据预设的指针算法,从其余方位的标准雷达点云数据中确定出与所述主方位的标准雷达点云数据的时间信息的绝对值差值满足预设阈值关系的标准雷达点云数据;
27、将满足预设阈值关系的标准雷达点云数据与所述主方位的标准雷达点云数据进行合并处理,得到整合后的雷达点云数据。
28、可选的,所述将提取出的多模态数据与所述雷达点云数据根据时间信息进行匹配处理,得到解析后的数据,包括:
29、将提取出的多模态数据进行反序列化处理,得到处理后的多模态数据,所述多模态数据包括定位数据、相机数据、障碍物检测数据;
30、根据整合后的雷达点云数据中的时间信息,将处理后的所述多模态数据根据所述时间信息进行匹配对齐,得到解析后的数据。
31、可选的,还包括:
32、根据所述多个数据包合并解析后的数据,生成掩码信息,所述掩码信息用于生成点云图中的非点云线部分。
33、第二方面,本技术提供一种数据的解析装置,包括:
34、获取模块,用于获取自动驾驶集卡车采集多个数据包,每个数据包中包括带有时间信息的初始雷达数据和带有时间信息的多模态数据;
35、提取模块,用于根据预先确定的感兴趣数据的时间信息,从每个数据包中提取出与所述时间信息对应的初始雷达数据和多模态数据;
36、处理模块,用于对于每个数据包,将提取出的初始雷达数据进行格式转换及合并处理,得到雷达点云数据,所述雷达点云数据为标准坐标系下的雷达点云数据;
37、匹配模块,用于将提取出的多模态数据与所述雷达点云数据根据时间信息进行匹配处理,得到解析后的数据;
38、所述处理模块,还用于对每个数据包解析后的数据进行合并处理,得到所述多个数据包合并解析后的数据,所述合并解析后的数据用于生成点云图中的点云线部分。
39、第三方面,本技术提供一种电子设备,包括:
40、至少一个处理器、存储器;
41、所述存储器存储计算机执行指令;
42、所述至少一个处理器执行所述存储器存储的计算机执行指令,使得所述电子设备执行第一方面任一项所述的数据的解析方法。
43、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如第一方面任一项所述的数据的解析方法。
44、第五方面,本技术提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现第一方面任一项所述的数据的解析方法。
45、本技术提供的数据的解析方法、装置、设备及存储介质,通过获取自动驾驶集卡车采集的多个数据包,每个数据包中包括带有时间信息的初始雷达数据和带有时间信息的多模态数据。根据预先确定的感兴趣数据的时间信息,从每个数据包中提取出与时间信息对应的初始雷达数据和多模态数据。对于每个数据包,将提取出的初始雷达数据进行格式转换及合并处理,得到雷达点云数据,其中,雷达点云数据为标准坐标系下的雷达点云数据,进而将提取出的多模态数据与雷达点云数据根据时间信息进行匹配处理,得到解析后的数据,最终对每个数据包解析后的数据进行合并处理,得到多个数据包合并解析后的数据,合并解析后的数据用于生成点云图中的点云线部分。本技术通过对初始雷达数据进行格式转换及合并处理,以及将提取出的多模态数据与雷达点云数据根据时间信息进行匹配处理,有效的提高了数据的解析效率。
- 还没有人留言评论。精彩留言会获得点赞!