位置关系判断方法、装置及设备与流程
本技术实施例涉及计算机,尤其涉及一种位置关系判断方法、装置及设备。
背景技术:
1、终端设备上通常设置有距离传感器,可以通过距离传感器判断某一对象相对于终端设备的位置关系。例如,当用户使用手机接打电话时,通常在接通电话后会将手机靠近耳边,此时,手机中的距离传感器将判断耳朵和手机之间的位置关系为接近,则手机将自动关闭屏幕,不仅可以避免出现用户误操作屏幕的情况,还可以降低电耗。
2、在相关技术中,通常在距离传感器出厂时,为距离传感器设定一个出厂门限值,在后续使用过程中,可以通过出厂门限值来判断对象相对于终端设备的位置关系。
3、然而,在距离传感器使用过程中,由于设备跌摔或距感挡板脏污等原因,导致距离传感器根据出厂门限值判断的位置关系不准确。
技术实现思路
1、本技术实施例提供一种位置关系判断方法、装置及设备,提高了距离传感器对目标位置关系判断的准确度。
2、第一方面,本技术实施例提供一种位置关系判断方法,应用于终端设备侧,终端设备中设置有距离传感器,包括:
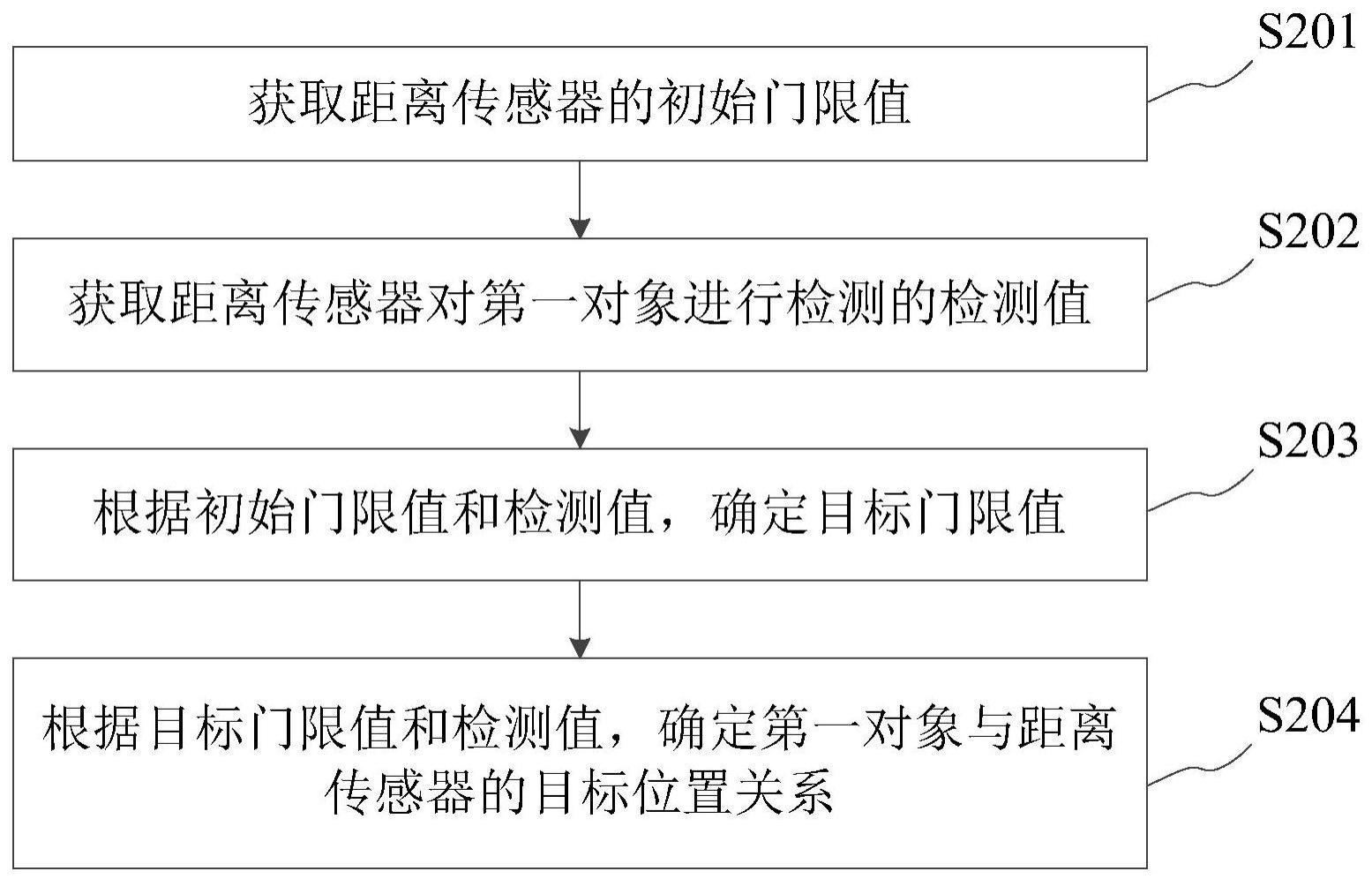
3、获取所述距离传感器的初始门限值,所述初始门限值至少是根据所述距离传感器的平均底噪值确定的;
4、获取所述距离传感器对第一对象进行检测的检测值;
5、根据所述初始门限值和所述检测值,确定目标门限值;
6、根据所述目标门限值和所述检测值,确定所述第一对象与所述距离传感器的目标位置关系,所述目标位置关系为接近关系或者远离关系。
7、在一种可能的实施方式中,获取所述距离传感器的初始门限值,包括:
8、获取所述距离传感器的平均底噪值、当前校准状态和出厂门限值;
9、根据所述当前校准状态和所述平均底噪值,判断是否对所述出厂门限值进行动态校准;
10、若是,则获取预设异物遮挡阈值,并根据所述平均底噪值和所述预设异物遮挡阈值,确定所述初始门限值;
11、若否,则将所述出厂门限值,确定为所述初始门限值。
12、在一种可能的实施方式中,根据所述当前校准状态和所述平均底噪值,判断是否对所述出厂门限值进行动态校准,包括:
13、若所述当前校准状态为自动校准状态,当所述平均底噪值与预设误差值的和大于出厂远离门限值时,或者,当所述平均底噪值小于工模底噪值时,则确定对所述出厂门限值进行动态校准;
14、若所述当前校准状态包括手动校准状态,当所述平均底噪值与预设误差值的和大于出厂远离门限值时,或者,当所述平均底噪值、预设接近增量值与所述预设误差值的和小于出厂接近门限值、以及所述平均底噪值大于预设最小底噪值时,则确定对所述出厂门限值进行动态校准;
15、若所述当前校准状态为无校准状态,则确定对所述出厂门限值进行动态校准。
16、在一种可能的实施方式中,根据所述平均底噪值和所述预设异物遮挡阈值,确定所述初始门限值,包括:
17、若所述平均底噪值小于所述预设异物遮挡阈值,则获取预设最大底噪值,根据所述预设最大底噪值和所述平均底噪值确定所述初始门限值;
18、若所述平均底噪值大于或等于所述预设异物遮挡阈值,则将当前门限值确定为所述初始门限值。
19、在一种可能的实施方式中,根据所述预设最大底噪值和所述平均底噪值确定所述初始门限值,包括:
20、若所述平均底噪值小于所述预设最大底噪值,则获取预设接近增量值和预设远离增量值,并根据所述平均底噪值、所述预设接近增量值和所述预设远离增量值,确定所述初始门限值;
21、若所述平均底噪值大于或等于所述预设最大底噪值,则将预设门限值确定为所述初始门限值。
22、在一种可能的实施方式中,根据所述平均底噪值、所述预设接近增量值和所述预设远离增量值,确定所述初始门限值,包括:
23、将所述平均底噪值和所述预设接近增量值的和,确定为初始接近门限值;
24、将所述平均底噪值和所述预设远离增量值的和,确定为初始远离门限值,其中,所述初始门限值包括所述初始接近门限值和所述初始远离门限值。
25、在一种可能的实施方式中,根据所述初始门限值和所述检测值,确定目标门限值,包括:
26、根据所述初始门限值和所述检测值,确定所述第一对象与所述距离传感器的第一位置关系;
27、在所述第一位置关系为所述接近关系时,确定所述距离传感器的异物遮挡状态,并根据所述异物遮挡状态和所述检测值确定所述目标门限值,其中,所述异物遮挡状态为有异物遮挡状态或无异物遮挡状态;
28、在所述第一位置关系为所述远离关系时,根据所述检测值确定所述目标门限值。
29、在一种可能的实施方式中,根据所述异物遮挡状态和所述检测值确定所述目标门限值,包括:
30、在所述异物遮挡状态为无异物遮挡状态时,获取所述距离传感器的当前门限值,并将所述当前门限值确定为所述目标门限值;
31、在所述异物遮挡状态为有异物遮挡状态时,获取所述距离传感器的当前异物遮挡计数总量和异物遮挡计数阈值,并根据当前异物遮挡计数总量、所述异物遮挡计数阈值、所述检测值、预设接近增量值和预设远离增量值,确定所述目标门限值。
32、在一种可能的实施方式中,根据当前异物遮挡计数总量、所述异物遮挡计数阈值、所述检测值、所述预设接近增量值和所述预设远离增量值,确定所述目标门限值,包括:
33、若所述当前异物遮挡计数总量大于所述异物遮挡计数阈值,则根据所述检测值更新动态底噪值,并根据所述检测值、所述预设接近增量值和所述预设远离增量值,确定所述目标门限值;
34、若所述当前异物遮挡计数总量小于或等于所述异物遮挡计数阈值,获取所述距离传感器的当前门限值,并将所述当前门限值确定为所述目标门限值。
35、在一种可能的实施方式中,根据所述检测值确定所述目标门限值,包括:
36、获取所述距离传感器的预设误差计数更新条件,所述预设误差计数更新条件为所述检测值大于预设最小底噪值,并且所述检测值与预设接近增量值的和小于当前动态底噪值;
37、根据所述检测值和所述预设误差计数更新条件,更新所述距离传感器的误差计数总量;
38、若更新后的误差计数总量大于误差计数阈值且所述检测值小于预设最大底噪值时,则根据所述检测值更新动态底噪值,并根据所述检测值、所述预设接近增量值和预设远离增量值,确定所述目标门限值;
39、若更新后的误差计数总量小于或等于所述误差计数阈值,或者,所述检测值大于或等于所述预设最大底噪值,则获取所述距离传感器的当前门限值,并将所述当前门限值确定为所述目标门限值。
40、第二方面,本技术实施例提供一种位置关系判断装置,包括获取模块和确定模块,其中:
41、所述获取模块用于,获取距离传感器的初始门限值,所述初始门限值至少是根据所述距离传感器的平均底噪值确定的;
42、所述获取模块还用于,获取所述距离传感器对第一对象进行检测的检测值;
43、所述确定模块用于,根据所述初始门限值和所述检测值,确定目标门限值;
44、所述确定模块还用于,根据所述目标门限值和所述检测值,确定所述第一对象与所述距离传感器的目标位置关系,所述目标位置关系为接近关系或者远离关系。
45、在一种可能的实施方式中,所述获取模块具体用于:
46、获取所述距离传感器的平均底噪值、当前校准状态和出厂门限值;
47、根据所述当前校准状态和所述平均底噪值,判断是否对所述出厂门限值进行动态校准;
48、若是,则获取预设异物遮挡阈值,并根据所述平均底噪值和所述预设异物遮挡阈值,确定所述初始门限值;
49、若否,将所述出厂门限值,确定为所述初始门限值。
50、在一种可能的实施方式中,所述获取模块还具体用于:
51、若所述当前校准状态为自动校准状态,当所述平均底噪值与预设误差值的和大于出厂远离门限值时,或者,当所述平均底噪值小于工模底噪值时,则确定对所述出厂门限值进行动态校准;
52、若所述当前校准状态包括手动校准状态,当所述平均底噪值与预设误差值的和大于出厂远离门限值时,或者,当所述平均底噪值、预设接近增量值与所述预设误差值的和小于出厂接近门限值、以及所述平均底噪值大于预设最小底噪值时,则确定对所述出厂门限值进行动态校准;
53、若所述当前校准状态为无校准状态,则确定对所述出厂门限值进行动态校准。
54、在一种可能的实施方式中,所述获取模块还具体用于:
55、若所述平均底噪值小于所述预设异物遮挡阈值,则获取预设最大底噪值,根据所述预设最大底噪值和所述平均底噪值确定所述初始门限值;
56、若所述平均底噪值大于或等于所述预设异物遮挡阈值,则将当前门限值确定为所述初始门限值。
57、在一种可能的实施方式中,所述获取模块还具体用于:
58、若所述平均底噪值小于所述预设最大底噪值,则获取预设接近增量值和预设远离增量值,并根据所述平均底噪值、所述预设接近增量值和所述预设远离增量值,确定所述初始门限值;
59、若所述平均底噪值大于或等于所述预设最大底噪值,则将预设门限值确定为所述初始门限值。
60、在一种可能的实施方式中,所述获取模块具体还用于:
61、将所述平均底噪值和所述预设接近增量值的和,确定为初始接近门限值;
62、将所述平均底噪值和所述预设远离增量值的和,确定为初始远离门限值,其中,所述初始门限值包括所述初始接近门限值和所述初始远离门限值。
63、在一种可能的实施方式中,所述确定模块具体用于:
64、根据所述初始门限值和所述检测值,确定所述第一对象与所述距离传感器的第一位置关系;
65、在所述第一位置关系为所述接近关系时,确定所述距离传感器的异物遮挡状态,并根据所述异物遮挡状态和所述检测值确定所述目标门限值,其中,所述异物遮挡状态为有异物遮挡状态或无异物遮挡状态;
66、在所述第一位置关系为所述远离关系时,根据所述检测值确定所述目标门限值。
67、在一种可能的实施方式中,所述确定模块具体还用于:
68、在所述异物遮挡状态为无异物遮挡状态时,获取所述距离传感器的当前门限值,并将所述当前门限值确定为所述目标门限值;
69、在所述异物遮挡状态为有异物遮挡状态时,获取所述距离传感器的当前异物遮挡计数总量和异物遮挡计数阈值,并根据当前异物遮挡计数总量、所述异物遮挡计数阈值、所述检测值、预设接近增量值和预设远离增量值,确定所述目标门限值。
70、在一种可能的实施方式中,所述确定模块具体还用于:
71、若所述当前异物遮挡计数总量大于所述异物遮挡计数阈值,则根据所述检测值更新动态底噪值,并根据所述检测值、所述预设接近增量值和所述预设远离增量值,确定所述目标门限值;
72、若所述当前异物遮挡计数总量小于或等于所述异物遮挡计数阈值,获取所述距离传感器的当前门限值,并将所述当前门限值确定为所述目标门限值。
73、在一种可能的实施方式中,所述确定模块具体还用于:
74、获取所述距离传感器的预设误差计数更新条件,所述预设误差计数更新条件为所述检测值大于预设最小底噪值,并且所述检测值与预设接近增量值的和小于当前动态底噪值;
75、根据所述检测值和所述预设误差计数更新条件,更新所述距离传感器的误差计数总量;
76、若更新后的误差计数总量大于误差计数阈值且所述检测值小于预设最大底噪值时,则根据所述检测值更新动态底噪值,并根据所述检测值、所述预设接近增量值和预设远离增量值,确定所述目标门限值;
77、若更新后的误差计数总量小于或等于所述误差计数阈值,或者,所述检测值大于或等于所述预设最大底噪值,则获取所述距离传感器的当前门限值,并将所述当前门限值确定为所述目标门限值。
78、第三方面,本技术提供一种芯片,所述芯片上存储有计算机程序,所述计算机程序被所述芯片执行时,实现如第一方面任一项所述的方法。
79、第四方面,本技术提供一种芯片模组,所述芯片模组上存储有计算机程序,所述计算机程序被所述芯片模组执行时,实现如第一方面任一项所述的方法。
80、第五方面,本技术实施例提供一种终端设备,包括:处理器和存储器;
81、所述存储器用于,存储计算机程序;
82、所述处理器用于,执行所述存储器中存储的计算机程序,实现如第一方面任一项所述的方法。
83、第六方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,当所述计算机执行指令被处理器执行时用于实现第一方面任一项所述的方法。
84、第七方面,本技术实施例提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时,实现如第一方面任一项所述的方法。
85、本技术实施例提供的位置关系判断方法、装置及设备,可以应用于设置有距离传感器的终端设备侧,可以获取距离传感器的初始门限值、以及距离传感器对第一对象进行检测的检测值,根据初始门限值和检测值,确定目标门限值,并根据目标门限值和检测值确定第一对象与距离传感器的目标位置关系。在上述过程中,可以根据初始门限值和检测值获取目标门限值,并根据目标门限值获取目标位置关系,提高了距离传感器对目标位置关系判断的准确度。
- 还没有人留言评论。精彩留言会获得点赞!