本技术涉及车辆领域,并且更具体地,涉及车辆领域中的控制激光雷达的方法、装置及车辆。
背景技术:
1、随着科学技术的发展以及人们生活水平的提高,越来越多的家庭选择车辆作为代步工具,人们的日常生活已离不开车辆。
2、通常情况下,车辆上会安装各种各样的传感器,以在车辆行驶过程中提高车辆以及人员的安全。例如,车辆上激光雷达的使用,它能够检测出行人以及行人的位置、检测出前车以及前车的位置等。据研究表明,不同波长的激光雷达发射出的激光的穿透程度是不同的,对人体的损伤部位也不同。对此,在确保车辆行驶安全的基础之上,还需要考虑使用车辆上的激光雷达发射激光时,对行人身体部位的保护。
技术实现思路
1、本技术提供了控制激光雷达的方法、装置及车辆,该方法能够在使用激光雷达实现安全驾驶的基础上,还能减少激光雷达所发射的激光对行人的身体部位的损伤。
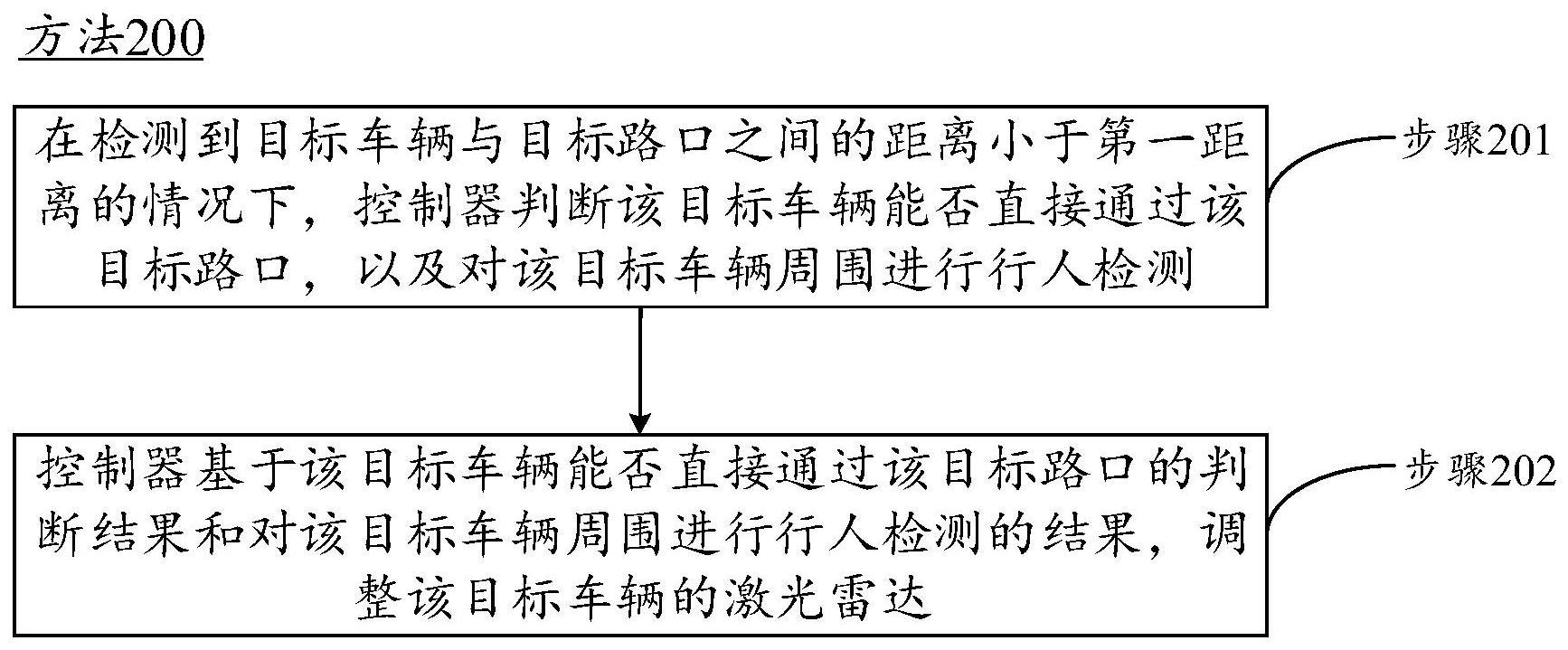
2、第一方面,提供了一种控制激光雷达的方法,该方法包括:在检测到目标车辆与目标路口之间的距离小于第一距离的情况下,判断该目标车辆能否直接通过该目标路口,以及对该目标车辆周围进行行人检测;基于该目标车辆能否直接通过该目标路口的判断结果和对该目标车辆周围进行行人检测的结果,调整该目标车辆的激光雷达。
3、上述技术方案中,在目标车辆与目标路口之间的距离小于第一距离,即,目标车辆距离目标路口比较近的情况下,判断该目标车辆能否直接通过该目标路口,以及对目标车辆周围进行行人检测。基于该目标车辆能否直接通过该目标路口的判断结果和对该目标车辆周围进行行人检测的结果,调整该目标车辆的激光雷达。而非激光雷达始终保持固定的探测范围进行探测。也就是说,本技术基于不同的场景,对激光雷达进行调整。例如,能够在目标车辆无法直接通过目标路口,且目标车辆周围存在至少一个行人的情况下,目标车辆能够关注到至少一个行人的动态,以免目标车辆碰撞到行人。由于激光雷达所发射的激光会对行人的身体部位造成损伤,因此,对激光雷达的调整还能够较少激光照射到行人,一定程度上,可减少激光对行人的身体部位的损伤。因此,本技术的方案能够在使用激光雷达实现安全驾驶的基础上,还能够减少激光雷达所发射的激光对行人的身体部位的损伤。
4、结合第一方面,在某些可能的实现方式中,基于该目标车辆能否直接通过该目标路口的判断结果和对该目标车辆周围进行行人检测的结果,调整该目标车辆的激光雷达,包括:在该目标车辆可直接通过该目标路口,且该目标车辆周围存在至少一个行人的情况下,基于该至少一个行人的身高,调整该激光雷达的垂直视场角;在该目标车辆可直接通过该目标路口,且该目标车辆周围不存在行人的情况下,将该激光雷达的垂直视场角调整为最大的垂直视场角。
5、上述技术方案中,描述目标车辆在可直接通过该目标路口的过程中,对该激光雷达的控制过程。具体是:在该目标路口处的目标车辆周围存在至少一个行人的情况下,目标车辆需要特别关注至少一个行人的动态,以免目标车辆碰撞到行人,并且需要考虑目标车辆的激光雷达所发射的激光对行人的身体部位的损伤。对此,可基于至少一个行人的身高,来调整激光雷达的垂直视场角。这样,激光雷达在垂直方向上对目标车辆周围的环境(包括至少一个行人)进行探测的过程中,能够使得较少的激光照射到行人,一定程度上,可减少激光对行人的身体部位的损伤。在该目标路口处的目标车辆周围不存在行人的情况下,控制器将该激光雷达的垂直视场角调整为最大的垂直视场角,能够控制该激光雷达在该最大的垂直视场角内进行探测。这是由于目标路口处的目标车辆周围不存在行人,不需要担心激光雷达所发射的激光会照射到行人,会损伤行人的身体部位。并且,在该方式下,目标车辆在通过该目标路口的过程中,目标车辆能够获取较广阔的视野。
6、结合第一方面,在某些可能的实现方式中,基于该至少一个行人的身高,调整该激光雷达的垂直视场角,包括:基于该至少一个行人的身高,确定第一高度,该第一高度用于指示该激光雷达所发射的激光照射到行人时,所得到的最大波束高度;基于该第一高度,调整该激光雷达的垂直视场角。
7、上述技术方案中,基于至少一个行人的身高,确定第一高度。由于第一高度用于指示该激光雷达所发射的激光照射到行人时,所得到的最大波束高度。相当于,限制了激光照射到行人时的最高波束高度。基于第一高度,调整该激光雷达的垂直视场角,能够使得激光雷达以该调整后的垂直视场角在垂直方向上进行探测的过程中,避免激光照射到对行人造成损伤的身体部位。
8、结合第一方面和上述实现方式,在某些可能的实现方式中,基于该至少一个行人的身高,确定第一高度,包括下述中的任一项:将该至少一个行人的身高中的最低身高,确定为该第一高度;将该至少一个行人的身高中最低身高与第一系数之间的乘积,确定为该第一高度。
9、上述技术方案中,基于目标车辆周围至少一个行人的身高,确定第一高度。具体地,将至少一个行人的身高中的最低身高,确定为第一高度;或者,将至少一个行人的身高中最低身高与第一系数之间的乘积,确定为第一高度。上述两种方式中,均能限定激光雷达所发射的激光照射到行人时所得到的最大波束高度。从而,能够反向控制激光雷达发射激光时的垂直视场角,使得激光雷达所发射的激光照射到行人时,最高的照射点与地面的距离都小于最大波束高度。因此,该方案能够最大限度地减少激光对行人的身体部位所造成的损伤。此外,将最低身高与第一系数之间的乘积确定为第一高度,第一高度可以低于至少一个行人的眼睛所在的高度。因此,基于第一高度来调整激光雷达的垂直视场角,能够避免激光照射到至少一个行人的眼睛,避免对行人的眼睛造成损伤。
10、结合第一方面和上述实现方式,在某些可能的实现方式中,基于该第一高度,调整该激光雷达的垂直视场角,包括:基于该第一高度,确定第一垂直视场角;将该激光雷达的垂直视场角调整为该第一垂直视场角。
11、上述技术方案中,由于垂直视场角用于指示激光雷达在垂直方向上的扫描角度,因此可通过调整激光雷达的垂直视场角,使得激光雷达所发射的激光照射到不同的高度。也就是说,垂直视场角与激光照射后所得到的高度存在一定的关系。因此,可基于第一高度,确定第一垂直视场角,从而将激光雷达的垂直视场角调整为第一垂直视场角,使得激光雷达在第一垂直视场角内进行探测。
12、结合第一方面和上述实现方式,在某些可能的实现方式中,基于该目标车辆能否直接通过该目标路口的判断结果和对该目标车辆周围进行行人检测的结果,调整该目标车辆的激光雷达,包括:在该目标车辆无法直接通过该目标路口,且该目标车辆周围存在至少一个行人的情况下,检测该目标车辆是否停车等候;在检测到该目标车辆停车等候的情况下,控制该激光雷达关闭;在检测到该目标路口的目标红灯的显示时间小于预设时间的情况下,启动该激光雷达,并将该激光雷达的垂直视场角调整为第二垂直视场角;在检测到该目标车辆与该目标路口之间的距离大于第二距离的情况下,将该激光雷达的垂直视场角调整为第三垂直视场角,该第三垂直视场角大于该第二垂直视场角。
13、上述技术方案中,描述在目标车辆无法直接通过目标路口,且目标车辆周围存在至少一个行人的情况下,对激光雷达进行调整的方案。目标路口处的目标车辆周围存在至少一个行人,在检测到目标车辆停车等候的情况下,控制器控制该激光雷达关闭。这是由于目标车辆停车等候后,不会碰撞到至少一个行人中的任一行人。并且,这还能减少激光雷达所发射的激光对至少一个行人身体上任何部位的损伤。在检测到该目标路口的目标红灯的显示时间小于预设时间的情况下,这表明目标车辆将要行驶,目标车辆行驶的情况下,有碰撞到行人的可能,因此,需要启动激光雷达,并将该激光雷达的垂直视场角调整为第二垂直视场角,以使对目标车辆周围的环境进行探测。在检测到该目标车辆与该目标路口之间的距离大于第二距离的情况下,可以是目标车辆即将离开目标路口的情况下,对此,控制器将该激光雷达的垂直视场角调整为第三垂直视场角,该第三垂直视场角大于第二垂直视场角。这是由于目标车辆即将要离开目标路口,此时目标车辆周围几乎不存在行人,不需要担心激光雷达所发射的激光对行人的身体部位的损伤。
14、结合第一方面,在某些可能的实现方式中,判断该目标车辆能否直接通过该目标路口的过程包括:基于该目标车辆的行驶参数、该目标车辆周围的环境信息和该距离,确定该目标车辆能否直接通过该目标路口。
15、结合第一方面和上述实现方式,在某些可能的实现方式中,基于该目标车辆的行驶参数、该目标车辆周围的环境信息和该距离,确定该目标车辆能否直接通过该目标路口,包括:基于该距离和该行驶参数,确定该目标车辆通过该目标路口需要的通行时间;基于该环境信息,确定该目标路口的交通灯的颜色和该交通灯的显示时间;基于该通行时间、该交通灯的颜色和该交通灯的显示时间,确定该目标车辆能否直接通过该目标路口。
16、上述技术方案中,由于目标车辆与目标路口之间的距离、目标车辆的行驶参数(可以是行驶速度和行驶加速度)均与目标车辆通过该目标路口的通行时间有关。交通灯的显示时间与通行时间的大小关系,会直接影响该目标车辆能否直接通过目标路口。因此,控制器基于该距离和该行驶参数,确定该目标车辆通过该目标路口需要的通行时间,并基于该通行时间、该交通灯的颜色和该交通灯的显示时间,确定该目标车辆能否直接通过该目标路口。
17、第二方面,提供了一种控制激光雷达的装置,该装置包括:确定模块,用于在检测到目标车辆与目标路口之间的距离小于第一距离的情况下,判断该目标车辆能否直接通过该目标路口,以及对该目标车辆周围进行行人检测;调整模块,用于基于该目标车辆能否直接通过该目标路口的判断结果和对该目标车辆周围进行行人检测的结果,调整该目标车辆的激光雷达。
18、结合第二方面,在某些可能的实现方式中,该调整模块,具体用于:在该目标车辆可直接通过该目标路口,且该目标车辆周围存在至少一个行人的情况下,基于该至少一个行人的身高,调整该激光雷达的垂直视场角;在该目标车辆可直接通过该目标路口,且该目标车辆周围不存在行人的情况下,将该激光雷达的垂直视场角调整为最大的垂直视场角。
19、结合第二方面和上述实现方式,在某些可能的实现方式中,该调整模块,具体还用于:基于该至少一个行人的身高,确定第一高度,该第一高度用于指示该激光雷达所发射的激光照射到行人时,所得到的最大波束高度;基于该第一高度,调整该激光雷达的垂直视场角。
20、结合第二方面和上述实现方式,在某些可能的实现方式中,该确定模块,具体用于下述中的任一项:将该至少一个行人的身高中的最低高度,确定为该第一高度;将该至少一个行人的身高中最低身高与第一系数之间的乘积,确定为该第一高度。
21、结合第二方面和上述实现方式,在某些可能的实现方式中,该调整模块,具体还用于:基于该第一高度,确定第一垂直视场角;将该激光雷达的垂直视场角调整为该第一垂直视场角。
22、结合第二方面和上述实现方式,在某些可能的实现方式中,该装置还包括:检测模块和控制模块,该检测模块,用于在该目标车辆无法直接通过该目标路口,且该目标车辆周围存在至少一个行人的情况下,检测该目标车辆是否停车等候;该控制模块,用于在检测到该目标车辆停车等候的情况下,控制该激光雷达关闭;该调整模块,具体还用于:在检测到该目标路口的目标红灯的显示时间小于预设时间的情况下,启动该激光雷达,并将该激光雷达的垂直视场角调整为第二垂直视场角;在检测到该目标车辆与该目标路口之间的距离大于第二距离的情况下,将该激光雷达的垂直视场角调整为第三垂直视场角,该第三垂直视场角大于该第二垂直视场角。
23、结合第二方面和上述实现方式,在某些可能的实现方式中,该装置还包括:判断模块,用于基于该目标车辆的行驶参数、该目标车辆周围的环境信息和该距离,确定该目标车辆能否直接通过该目标路口。
24、结合第二方面和上述实现方式,在某些可能的实现方式中,该判断模块,具体用于:基于该距离和该行驶参数,确定该目标车辆通过该目标路口需要的通行时间;基于该环境信息,确定该目标路口的交通灯的颜色和该交通灯的显示时间;基于该通行时间、该交通灯的颜色和该交通灯的显示时间,确定该目标车辆能否直接通过该目标路口。
25、第三方面,提供一种车辆,包括存储器、处理器以及存储在该存储器中并在该处理器上运行的计算机程序,其中,该处理器执行该计算机程序时,使得该车辆执行上述第一方面或第一方面任意一种可能的实现方式中的方法。