一种基于LSTM和注意力机制的改进PDR室内定位方法
本发明涉及行人导航定位,更具体的说是一种基于lstm和注意力机制的改进pdr室内定位方法。
背景技术:
1、在日常活动中,对人体位置的准确跟踪是有益的,例如在日常通勤期间提供导航,但在灾难救援或医疗紧急情况下也可以挽救生命。这种跟踪直接涉及到基于位置服务(location based services,lbs)的概念,定位是lbs的核心技术之一,在物联网和人工智能的许多应用中也发挥着重要的作用。尽管全球导航卫星系统(global navigationsatellite system,gnss)能够在室外提供良好的定位服务,但在很多情况下,尤其是在室内深处,由于信号屏蔽和衰减等原因,无法提供连续可靠的定位。
2、智能手机内置大量传感器,如加速度计、陀螺仪、磁力计、气压计、光线传感器、摄像头等,采取合适的技术在智能手机中实现低成本、连续性和高可靠性的室内定位模式是可行的。行人航位推算(pedestrian dead reckoning,pdr)能够利用智能手机内部低成本惯性测量单元实现行人位置的计算。pdr系统不依赖于外部辅助信号或基础设施,可以在任何场景下工作,不需要昂贵的人力和时间开销,系统复杂度低,简单通用。
3、尽管手机pdr系统在室内定位中具有诸多优势,但仍存在制约其使用的问题。首先,传感器不同的佩戴模式和行人运动状态的模糊性导致难以实现精确的步长估计。其次,航向角的可靠性仍需进一步提高。第三,pdr的鲁棒性受到不同手机姿态的人类活动的强烈影响。
4、关于步态检测的研究。jimenez等人分别测试了使用加速度计、陀螺仪、磁力计进行基于阈值的步态检测算法,实验误差为0.1%、0.2%和0.94%;shin和park使用加速度微分和滑动窗口求和(sws)方法进行步态检测,构建合适的数学模型,可显著降低噪声。对于步态检测,目前有过零检测、阈值检测、峰值检测、相关检测等多种技术,但大部分方法都没有对行人运动状态进行划分,对多运动行为适应性不高。关于步长估计的研究。人类步态被认为是用于步长测量的倒立摆模型,weinberg模型基于此生物力学模型,获得了步幅长度与单个步幅内z轴加速度最大值和最小值之间的差值关系,误差在步行距离的±8%以内。kim等人提出了一种新的基于模式识别的系统,通过实验发现了步长和加速度之间的关系。do等人提出了一个经验步长公式,该公式考虑了垂直位移,误差为步行距离的1%。这些步长估计算法在以正常速度走直线的情况下具有良好的性能,但由于各种限制,在真实路径中会导致一定程度的不准确行。关于航向估计的研究。ladetto提出可以利用自适应卡尔曼滤波器递归预测航向变化参数,最终改善了人员运动航向估计的误差。gusenbauer等人提出使用简单的线性递归滤波器来仅使用磁力计测量来估计航向。
5、因此有人申请公开号cn110118560a名称“一种基于lstm和多传感器融合的室内定位方法”;
6、该申请采用的方案是,使用lstm模型对行人位置坐标进行估计预测,而我们搭建的是基于attention机制改进的lstm神经网络预测模型对pdr系统中的步长进行估计,相比于单纯的lstm更能突出关键信息,实现的精度更高
7、其使用传统的pdr进行行人位置估计,我们使用提升树算法对行人运动状态识别,根据运动状态约束相关参数,可以减少pdr系统的误差。
8、对于步长估计采用的是步长与身高体重步频的经验公式,普适性不足,而我们使用的是使用神经网络预测的方法进行步长估计,不限制于行人的行走方向和模式,能够更好地适应复杂真实路径下的步长估计。
技术实现思路
1、为解决上述技术问题,本发明提出了一种基于lstm和注意力机制的改进pdr室内定位方法,用于稳定且精确地进行行人室内定位,提高传统pdr系统的定位性能。
2、为实现上述目的,本发明采取的技术方案是:
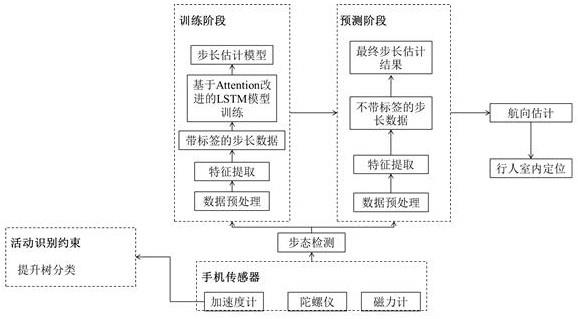
3、本发明提供一种基于lstm和注意力机制的改进pdr室内定位方法,包括以下步骤:
4、s1,编写数据采集软件,获取智能手机内部加速度计、陀螺仪、磁力计数据,使用adaboost提升决策树的分类性能,实现提升树算法,根据已采集的加速度数据一系列特征值实现行人运动状态识别;
5、s2,根据识别出的运动状态,设置不同的阈值,利用波峰双阈值法实现pdr过程中的步态识别;
6、s3,构建步长估计模型,搭建基于attention机制改进的lstm神经网络预测模型,并利用已采集的数据集进行训练、测试,将采集到的实时加速度计数据陀螺仪数据投入已训练的模型以实现pdr过程中的步长估计;
7、s4,使用陀螺仪和磁力计数据,利用四元数姿态解算方法实现pdr过程中的航向估计,同时根据识别出的运动状态约束相关参数,减少pdr系统的误差,最终结合已获得的步长,完成行人室内定位。
8、作为本发明进一步改进,所述步骤s1包括以下步骤:
9、s11:通过获取sensormanager获得当前设备的所有传感器信息list,将传感器数量以及使用到的加速度计传感器的详细信息显示在屏幕上,如果没有所需的传感器,将在屏幕上显示提示信息,表示此设备不能支持本次的实验工作;
10、s12:通过sensormanager获取带监听的传感器的信息;
11、s13:创建传感器监听函数,获取待监听的传感器type_accelerometer、type_gyroscope、type_magnetic_field,根据需求,设置的采样频率为sensormanager.sensor_delay_game,即50hz;
12、s14:注销监听器的调用;
13、s15:基于单层决策树构建弱分类器,使用adaboost算法提升分类器性能;
14、s16:根据采集到的加速度计数据生成训练集、测试集,并对所述训练集、测试集进行特征提取,将代表步态的某些特征参量提取出来,通过提取时域特征来进行运动状态分类识别;
15、s17:将特征数据投入搭建好的提升树模型中进行训练测试。
16、作为本发明进一步改进,步骤s17所述时域特征有绝对值均值、方差、众数、四分位距、偏度和峰度。
17、作为本发明进一步改进,所述步骤s2包括以下步骤:
18、s21:加速度值的采集,通过对垂直方向的加速度峰值检测分析以得到最终结果;
19、s22:滤波,滑动窗口平均技术进行数据平滑处理;
20、s23:阈值的确定,进行波峰阈值和时间阈值双阈值的设置,根据步骤s2的不同运动状态设置不同的阈值。
21、作为本发明进一步改进,所述步骤s4包括以下步骤:
22、s41:进行手机载体坐标系b系到导航坐标系n系的坐标转换,通过旋转矩阵实现:
23、
24、s42:根据上述旋转矩阵求得姿态角:
25、
26、其中,γ为横滚角,θ为俯仰角,ψ为偏航角,也即本文所求的航向角;
27、s43:不断更新四元数以获得各个时刻的航向角,使用一阶龙格-库塔法runge-kutta实现:
28、
29、其中,ωxωyωz为三轴陀螺仪数据,t=0初始时刻四元数一般取[1,0,0,0];
30、s44:根据识别出的运动状态约束相关参数,减少pdr系统的误差;
31、s45:当已知初始位置(e0,n0)时,推算出其它位置信息:
32、
33、其中,dn为每一步的步长,θn为航向角。
34、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
35、通过对人员行走模式的划分,进一步提高了步态检测的精确度;使用深度学习的方法进行步长估计,不存在双积分方法需要重新初始化积分过程并消除累积误差的零速度假设,同时不限制于行人的行走方向和模式,能够更好地适应复杂真实路径下的步长估计;改进的pdr室内定位方法能够实现稳定且精确的行人室内定位功能。
- 还没有人留言评论。精彩留言会获得点赞!