通过虚拟世界系统实现基于位置的自主导航的制作方法
本公开涉及计算机系统,更具体地涉及一种通过虚拟世界系统实现基于位置的自主导航的系统、方法、自主移动机器人和计算机可读介质。
背景技术:
1、近年来,得益于在机器人、人工智能、定位技术和网络等领域取得的进步,自主移动机器人,包括无人机,无人驾驶汽车和其他配置为可移动并自主执行多项任务的计算设备,变得越来越普及。
2、当前自主移动机器人面临的一个挑战是在某些构造复杂的环境中移动,如包含多个障碍物的房间,或在如楼梯等构造环境中攀爬。除了逐步改进的人工智能和机器学习算法以外,截止目前,解决方案是通过传感器,如光学传感器(例如摄像机、即时定位与地图构建(slam)传感器、声学传感器等)来对所述房间内的障碍物进行定位,以使所述自主移动机器人躲避危险。
3、在一些情况下,要保证所述(半自动)自主移动机器人顺畅地从一个区域移动到另一个区域,这一过程可能需要大量的操作员介入。更进一步,通过所述传感器在一个区域内进行路径定位和/或通过slam生成实时地图所需的额外运算,对于所述自主移动机器人的处理器来说可能是繁重的。
技术实现思路
1、本
技术实现要素:
简明扼要地介绍了一系列概念,并在以下详细说明中进一步加以描述。所述发明内容不用于明确要求保护的主题的关键特征,也不用作确定要求保护的主题的辅助手段。
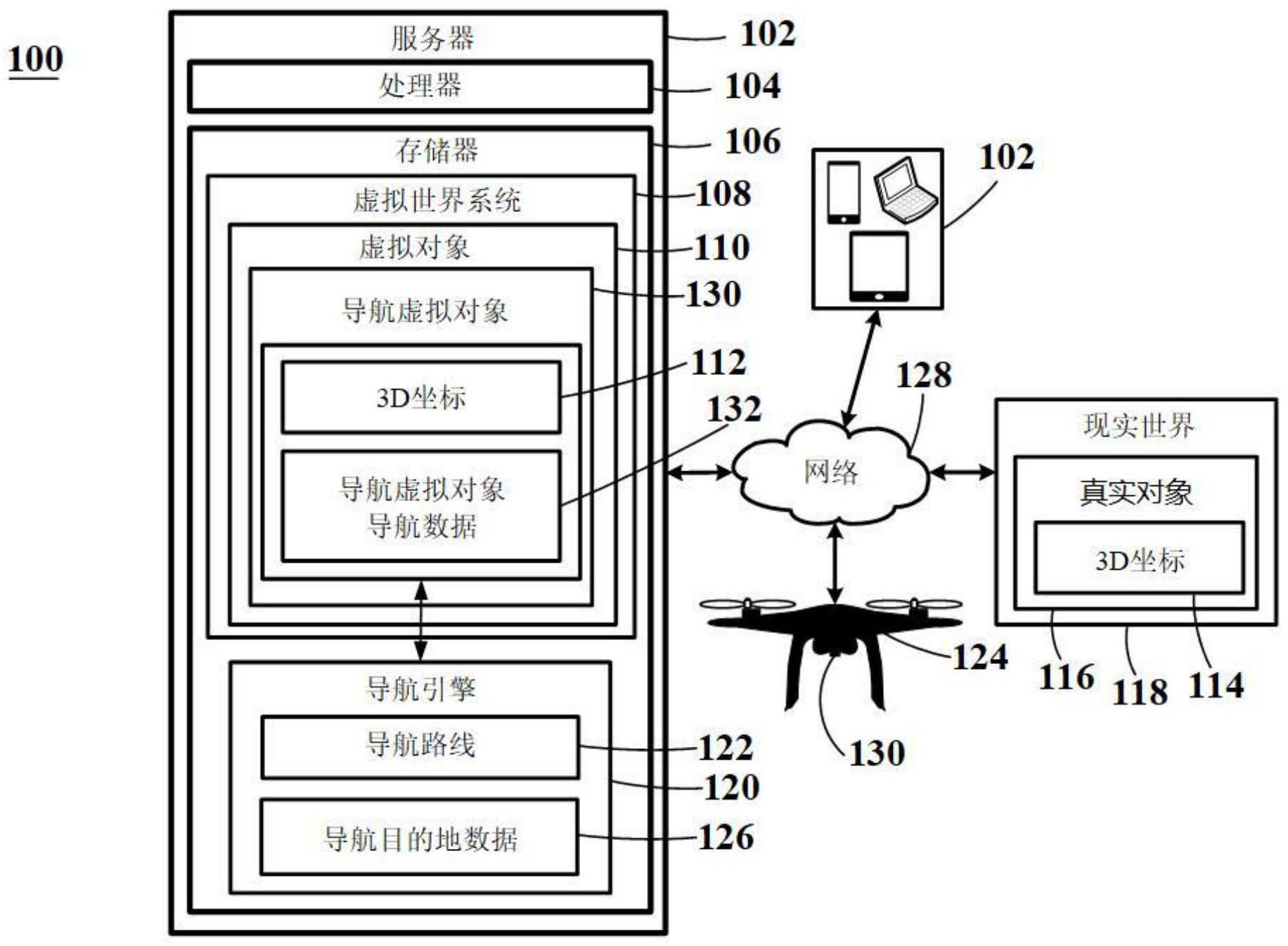
2、本公开提供一种通过虚拟世界系统实现基于位置的自主导航的系统。所述系统包括含有一个计算机服务器系统的至少一台计算机服务器,所述计算机服务器中包括至少一个处理器和储存一个虚拟世界系统的存储器,所述虚拟世界系统包括至少一个虚拟对象,通过虚拟三维地理定位坐标对所述虚拟对象的空间定位进行界定,所述虚拟三维地理坐标与现实世界对象的三维地理定位坐标相对应;以及一个导航引擎配置为基于所述导航目的地数据并结合所述至少一个虚拟对象的三维地理定位坐标来计算至少一个自主移动机器人的导航路线。所述导航引擎使所述至少一个自主移动机器人能通过所述至少一个自主移动机器人的虚拟副本实现在现实世界中自主导航,所述虚拟副本包含在与一个或多个对应运动机构和电路系统相连的所述虚拟世界系统中。
3、在一些实施例中,一些所述虚拟世界系统中的所述虚拟对象代表了现实世界中可导航构造的导航虚拟对象,所述导航虚拟对象包括为所述至少一个自主移动机器人界定一条或多条潜在导航路径的导航数据和指令。所述导航数据和指令可包括多条导航路径,所述导航路径包括被所述导航引擎用于计算导航路线的三维坐标和方向向量。所述多个导航路径可参考靠近所述自主移动机器人的其他导航虚拟对象,以确定用于所述导航路线的所述计算的最优路径。在进一步的实施例中,当所述自主移动机器人接近现实世界对象时,所述至少一个导航虚拟对象被经由所述网络传输给所述至少一个自主移动机器人。
4、在一些实施例中,所述导航引擎根据所述导航虚拟对象的所述导航数据进一步计算并动态更新所述导航路线。在其他实施例中,所述至少一个自主移动机器人进一步包括至少一个传感器。所述导航引擎可进一步利用所述至少一个传感器捕获的所述数据实时更新所述导航路线。因此,通常情况下,所述导航引擎可以不受限于实时或地图生成(例如,即时定位与地图构建(slam))过程中传感器的运行,从不同来源获取多个数据来计算、更新和改善所述自主移动机器人的所述导航路线。更进一步,为所述导航虚拟对象提供导航数据,使所述导航引擎改善所述导航路线,这样可提供一种可替代的高效计算方式,因为在所述导航路线计算过程中的每个所述导航虚拟对象可支持所述至少一台计算机服务器和自主移动机器人。
5、在一些实施例中,所述虚拟对象包括现实世界元素的所述虚拟副本,或纯虚拟对象,或二者的结合。在这些实施例中,至少一些所述纯虚拟对象是虚拟走廊,经由所述虚拟走廊和所述至少两个现实世界对象的所述对应的虚拟副本虚拟耦合至少两个现实世界对象定义了所述至少一个自主移动机器人的所述导航路线。因此,所述虚拟走廊可以为所述自主移动机器人的导航提供进一步的导航路线计算选择。
6、在本公开的另一方面,公开了一种通过虚拟世界实现基于位置的自主导航的方法。所述方法包括定义了,在至少一台计算机服务器的存储器中提供的虚拟世界系统中,至少一个虚拟对象的虚拟三维地理定位坐标匹配至少一个对应的现实世界对象的所述三维地理定位坐标。所述方法通过存储在所述至少一个服务器存储器中的导航引擎输入自主移动机器人的导航目的地数据来继续,所述方法结束于,由导航引擎计算,基于所述导航目的地数据和参考所述至少一个虚拟对象的所述三维地理定位坐标的至少一个自主移动机器人的所述导航路线,实现所述至少一个自主移动机器人通过包括在所述虚拟世界系统中并与一个或多个对应的运动机构和电路相连接的所述至少一个自主移动机器人的虚拟副本在现实世界中自主导航。
7、在一些实施例中,所述方法进一步包括向一些所述虚拟对象提供导航数据和指令来为所述至少一个自主移动机器人定义一个或多个可能的导航路径,并创建代表现实世界中可导航构造的导航虚拟对象。在进一步的实施例中,所述方法包括由所述导航引擎根据所述导航虚拟对象的所述导航数据计算并动态更新所述导航路线。
8、在一些实施例中,所述方法包括当所述自主移动机器人接近现实世界对象时,按照需求将所述至少一个导航虚拟对象经由所述网络传输给所述至少一个自主移动机器人。
9、在一些实施例中,所述方法进一步包括通过将安装在所述自主移动机器人上的至少一个传感器捕获的数据与所述导航虚拟对象的所述数据相结合,实时更新所述导航路线。
10、在一些实施例中,所述虚拟对象包括现实世界元素的所述虚拟副本,或纯虚拟对象,或二者的结合。在这些实施例中,至少有一些所述纯虚拟对象是用来定义所述至少一个自主移动机器人的所述导航路径的虚拟走廊。在进一步的实施例中,所述方法包括通过所述虚拟走廊和所述至少两个现实世界的所述对象对应的虚拟副本之间的连接来虚拟耦合至少两个现实世界对象。
11、在本公开的另一方面,提供一种自主移动机器人,包括一个驱动单元,将来自控制单元的信号转换为所述自主移动机器人的移动;一个通信单元将所述自主移动车辆连接到网络,使至少一台存储器中储存了导航引擎和虚拟世界系统的计算机服务器与其相连;以及包括至少一个处理器和存储器的控制单元。所述至少一个处理器接收由所述至少一个计算机服务器的所述导航引擎参考与在所述虚拟世界系统中虚拟对象的三维地理定位坐标相匹配的对应的现实世界对象的三维地理定位坐标和导航目的地数据计算出的导航路线,通过包括在所述虚拟世界系统中的所述至少一个自主移动机器人的虚拟副本驱使所述自主移动机器人在现实世界自主导航。
12、在一些实施例中,一些所述虚拟世界系统中的所述虚拟对象代表了现实世界中可导航构造的导航虚拟对象,所述导航虚拟对象包括为所述至少一个自主移动机器人界定一条或多条潜在导航路径的导航数据和指令。在进一步的实施例中,所述导航引擎根据所述导航虚拟对象的所述导航数据进一步计算并动态更新所述导航路线。在进一步的实施例中,当所述自主移动机器人接近现实世界对象时,所述至少一个导航虚拟对象被经由所述网络传输给所述至少一个自主移动机器人。
13、在一些实施例中,所述至少一个自主移动机器人进一步包括至少一个传感器,其中,所述导航引擎进一步利用所述至少一个传感器捕获的所述数据实时更新所述导航路线。
14、在一些实施例中,所述虚拟对象包括现实世界元素的所述虚拟副本,或纯虚拟对象,或二者的结合。在这些实施例中,至少一些所述纯虚拟对象是虚拟走廊,经由所述虚拟走廊和所述至少两个现实世界对象的所述对应的虚拟副本虚拟耦合至少两个现实世界对象定义了所述至少一个自主移动机器人的所述导航路线。
15、在本公开的另一方面,提供了计算机可读介质,至少一种所述计算机可读介质中储存了指令,其被配置为使包括一个处理器和存储器的至少一台计算机服务器执行多个步骤。所述步骤可包括,在至少一台计算机服务器的存储器中提供的虚拟世界系统中,至少一个虚拟对象的虚拟三维地理定位坐标匹配至少一个对应的现实世界对象的所述三维地理定位坐标;存储在至少一个服务器存储器中的导航引擎输入自主移动机器人的导航目的地数据,由所述导航引擎计算,基于所述导航目的地数据和参考所述至少一个虚拟对象的所述三维地理定位坐标的所述至少一个自主移动机器人的所述导航路线,实现所述至少一个自主移动机器人通过包括在所述虚拟世界系统中并与一个或多个对应的运动机构和电路相连接的所述至少一个自主移动机器人的虚拟副本在现实世界中自主导航。
16、上述发明内容不包括本公开中的所有详细列表。考虑到本公开包括了全部的系统和方法,这些系统和方法可以参照上面发明内容的所有适当内容以及在下文详细说明中公开的内容进行实践,特别是那些在应用领域中指出的系统和方法。这些方法具有的特别优势没有在上述发明内容中特别列举。本发明的其他特征和优势详见附图以及下面的详细说明。
- 还没有人留言评论。精彩留言会获得点赞!