一种采用小型无人机载测距雷达进行探宝的系统的制作方法
本发明涉及一种系统,具体涉及一种采用小型无人机载测距雷达进行探宝的系统,属于探测系统。
背景技术:
1、现代生活中,有很多人喜欢从事探宝户外运动,使用的探宝器就是传统的金属探测仪,检测方法是通过电磁感应判断金属的存在和位置。它被应用到了军事(排雷行动)、考古(寻找古代物品)、专业探宝、娱乐休闲(寻找埋藏的物品)、金属资源回收,以及食品、医药、橡胶、纺织、造纸、化工、矿石等工业上金属异物检测等许多领域。但传统的金属探测仪局限很大,比如检测距离短,无法适应高速运动状态下精确检测,检测无法快速准确定位目标位置。因此,在一定程度上限制了应用范围。众所周知,电磁波信号可以有效穿透塑料、塑胶、橡胶、玻璃、陶瓷等物质,可以有效反射金属物质,利用电磁波的这种特性,可以使用小型测距雷达收发信号检测金属目标的存在和位置,其检测精度高,可以在快速运动中检测。
技术实现思路
1、本发明正是针对现有技术中存在的问题,提供一种采用小型无人机载测距雷达进行探宝的系统,该技术方案设计了一种运用小型无人机载测距雷达进行的探宝运动方案,使用该方案可以极大的拓展探宝的范围,提供探宝效率和准确度,增强了娱乐性和团队合作性;可以发展成为人们的娱乐项目,也可作为教育学生的科学兴趣,同时培训学生生产生活中运用新技术的能力;且本方案的检测方法可以推广应用在诸多金属检测领域。
2、为了实现上述目的,本发明的技术方案如下,一种采用小型无人机载测距雷达进行探宝的系统,所述系统包括小型测距雷达,小型无人机飞行器、安装角度可调整结构件、地面通用飞控计算平台、通用无线通讯平台、定位显示软件。
3、其中,雷达安装于无人机下部,天线对准地平面;其波束角度h-plane水平65°,e-plane垂直53°;h-plane对应无人机俯仰角度β,通过安装结构件的角度调节可使无人机在平行地平面飞行时,h-plane的一边波束垂直于地面,另一边与地面垂线形成65度夹角;e-plane对应无人机横滚角度θ,通过安装结构件的角度调节可使无人机在平行地平面飞行时,e-plane的一边波束垂直于地面,另一边与地面垂线形成53度夹角;安装结构件设计成角度可调节,h-plane方向为±32.5度和0度模式,e-plane方向为±26.5度和0度模式。
4、作为本发明的一种改进,雷达采用60ghz毫米波雷达,属于57-64ghz,非许可的ism频带,可全球通用。该雷达要求如下:1.三维测距范围可达20米(球型角反射器r=50mm);2.额外提供透镜天线以调整波束适应不同应用;3.毫米级精度;4.可在运动和有速度情况下测量;4.低功耗,节能环保低辐射;5.安全可靠,经济实用。目前市场上已有类似雷达产品,其天线波束如下图1,可以通过透镜天线在不同应用中改变天线空域覆盖。hpbw typicalof 65(h-plane)and 53degrees(e-plane)。
5、作为本发明的一种改进,所述无人机飞行器飞行性能要求如下:飞行距离≥200m,飞行速度≥8m/s,飞行时间≥40min,飞行高度≥20m。
6、功能要求如下:1.配置无线wifi路由功能,实现数据上下行;2.实时编队模式下,计算机软件可连接飞行器进行实时编队,飞行器信息(电量、坐标信息等)将实时反馈至计算机软件;整个无人机系统控制显示是在地面计算平台完成。计算软件一边上行飞行控制指令,一边接入和存储飞机的飞行数据,并根据不同飞行模式对应不同定位算法,显示定位结果。
7、一种小型无人机载测距雷达进行探宝的方法,采用该系统进行定位的方法如下:
8、步骤1:根据目标搜索模式进行判断分析目标有无,如有目标,是单目标还是多目标;
9、步骤2:根据不同的目标定位要求采用不同的定位方法。
10、其中,步骤1中,此时四路无人机的天线h-plane方向为0度模式,e-plane方向为0度模式,天线覆盖无重叠且对地面的覆盖边沿线重合,单机飞行高度≤20米,可以最大节约搜索时间且达到最大覆盖面积;步骤2中,分析如下:如果发现一个目标,则采用比较简单的单机或双机定位法;如果有两个或以上目标则采用三机或四机实时定位法;如果对目标精度要求很高,可以采用四机延时定位法。
11、其中,单机定位法具体如下:
12、1)单机定位法--最短距离搜索法
13、针对某区域的单目标,该无人机在其上空盘旋,直到所测距离d最短,略大于距离地面目标,此时可定位该目标,该方法耗时较长,精度掌握有难度。h-plane方向为0度模式,e-plane方向为0度模式;
14、2)单机定位法--升降法
15、单机悬停在固定高度h1,测得目标距离d1,然后降低至高度h0,测得目标距离d2,目标埋藏的深度为d0,此时目标距离该机在地面的投影点距离为x=sqrt(d1*d1-(h1+d0)*(h1+d0))=sqrt(d2*d2-(h0+d0)*(h0+d0));此时可以计算出目标埋藏的深度d0和目标距离x;此时目标坐落于以该投影点为中心,半径为x的圆上,故此法可测埋藏深度,并形成圆形模糊区。
16、其中,双机定位法,具体如下,
17、双机定位法--平面交叉法,
18、无人机在某区域针对某一目标时,悬停在固定高度,测得目标距离d1,距离地面垂直高度h1,假定目标埋在地下d0米处(由于比赛需要通常目标不会埋藏过深,只在比赛规定的浅层范围),此时目标位置距离无人机垂直地面距离x1=sqrt(d1*d1-(h1+d0)*(h1+d0));而根据另一无人机的位置可以同理计算出x2=sqrt(d2*d2-(h2+d0)*(h2+d0));则根据目前两机的位置为圆心,半径x1,x2交叉定位出两个可能目标。此时可以结合单机定位方法进行去镜像伪目标得到真实目标。h-plane方向为0度模式,e-plane方向一机为26.5度模式,另一机为-26.5度模式。两机保证h-plane和e-plane方向产生的天线信号覆盖区完全重叠。
19、其中,三机定位法,具体如下,
20、三机定位法--三角编队多目标定位,
21、此时前机为三角编队1号机,后机为2、3号机,1号机h-plane方向为32.5度模式,2、3号机为-32.5;1号机e-plane方向为0度,2号机e-plane方向为26.5度,3号机为-26.5度模式;三者在此方向天线辐照区重叠。使用此三角编队对单目标定位可以实时定位,速度最快,因为第1号机的加入,可以快速去除目标镜像。三机定位法对某区域内含有多目标可以同样检测,假设飞行高度为h,则1号机到2、3号机的垂直距离为h*tan65°=2.14h,2、3号机距离为h*tan53°=1.33h,而1号机此时的地平面覆盖为2*h*tan26.5°=0.997h,所以要重合1号机和2、3号机的覆盖范围,只有提高1号机高度,或降低2、3号机高度,1号机高度为2、3号机高度的1.334倍。
22、其中,四机实时定位法,具体如下,
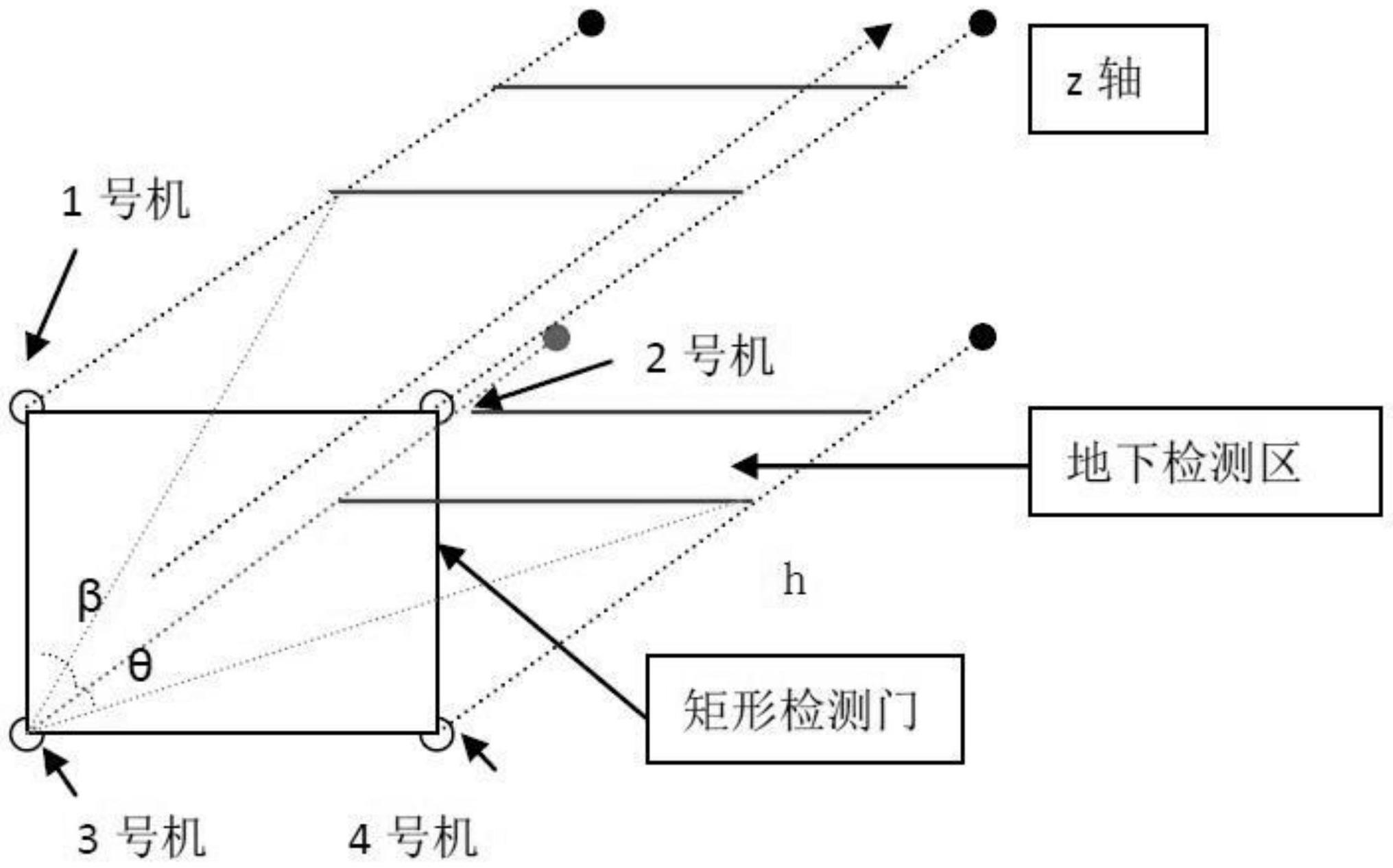
23、四机实时定位法—矩型检测门实时定位,
24、此时前机左为1号机,前机右为2号机,后机为3、4号机,1、2号机h-plane方向为32.5度模式,3、4号机h-plane方向为-32.5度模式;1、3号机e-plane方向为26.5度模式,2、4号机e-plane方向为-26.5度模式;此时四机的天线辐照区重叠。理论上三机定位就可以检测多目标,之所以采用四机定位是因为增加的飞机可以增加定位精度和准确度。假设飞行高度为h,则1、3机距离为h*tan65°=2.14h,2、4号机距离为h*tan53°=1.33h,此时检测门范围最大,当然飞行高度以能准确检测到目标范围内为优。此时天线安装俯仰角β为65度,方位角θ为53度,本队形形成矩形定位门下方垂直距离h到雷达最大探测距离d之间的地下检测区,四个雷达的天线辐照均可覆盖此检测区。此时可检测的空间大小为长=2.14h,宽=1.33h,高>h。
25、其中,四机延时定位法,具体如下,
26、四机延时定位法—矩型检测门延时定位法
27、此方法在四机实时定位法基础上,系统在形成检测平面后再跟踪目标下降或上升一定高度后,延时计算出目标的距离检测门平面的垂直距离(即得到目标埋藏深度坐标),再计算出目标在检测门平面的投影位置,得到目标的二维平面位置;综合二者信息得到目标的三维坐标。该方法通过下降检测门平面的高度,复用了4个雷达的实测数据,实际使用了8个位置雷达传感器的信息。
28、假定有一个目标被检测,雷达1测得距离d1,其他雷达测得目标距离依次为d2,d3,d4。目标坐标(x,y,z)以雷达1安装点为原点,目标高度在z轴,如果被检测高度最大范围h0,则目标高度坐标h范围为地面高度h1到h0区间。假定矩形定位门移动距离s,此时接收到的雷达目标是之前基准目标跟踪获得,故雷达的目标号不变,可设此时4个雷达目标检测的距离为d11,d21,d31,d41,则在此时的坐标r*r+z*z=d11*d11,r为目标在地平面投影到原点的距离,结合之前基准时刻的方程为r*r+(z-s)*(z-s)=d1*d1,可计算出此时的z坐标,即计算出目标距离矩形检测门平面的垂直距离z。然后将4个雷达的所测距离映射到检测门平面,根据解模糊原理,可以解出此时的目标的x轴坐标和y轴坐标。依次类推,如果检测目标数为n,则模糊目标数为n*n;理论上只要检测足够准确,只需雷达1,2,3组合就可以计算出对应的x、y值,由于实际中目标检测的虚警和漏警的存在,由雷达4参与冗余计算,完全可以更加准确的计算出目标的真实三维坐标。
29、相对于现有技术,本发明具有如下优点,1)、该技术方案通过无人机搭载小型测距雷达进行探宝运动的设计是通过无人机和雷达两者结合发明了一种新型娱乐方式,相较于传统的探宝运动,新方式探测距离广,效率高,娱乐性更强,还增加了团队协作要求,同时该运动的普及能让更多人了解这些雷达、无人机技术,激发这类军事技术的民用需求,促进第三代互联网--物联网的发展;2)、本系统采用无人机载小型毫米波测距雷达组队进行多种方法的定位检测金属目标,该方案可以推广应用到诸多金属检测领域。使用该方法具有检测精度高,准确度高,可以精确定位目标位置;传统方法只能检测有无目标,且通过目标强弱来判断目标位置,这种方法统称为模拟信号测量;本系统采用雷达信号数字化测量,优势明显,还可以在快速运动中检测,传统方法在一定速度下无法准确检测。故本方案具有较高的社会价值外还具备较高的产业价值。
- 还没有人留言评论。精彩留言会获得点赞!