一种基于多刃边扫描的高效高精度波前检测方法及装置
本发明属于光学检测,涉及一种基于多刃边扫描的高效高精度波前检测方法及装置。
背景技术:
1、早在1997年,olivier h.等人就利用笔光束扫描法进行了反射镜的面形检测(参考文献hignette o,freund a k,chinchio e,incoherent x-ray mirror surfacemetrology[j].proc.spie,1997,3152:188–199);类似的,在2012年sutter j.等人也利用笔光束扫描法进行了自适应变形镜面形的在线检测(参考文献sutter j,alcock s,sawhney k.in situ beamline analysis and correction of active optics[j].journal of synchrotron radiation,2012,19:960-968);该方法可以实现在一维方向(子午方向)上的检测。笔光束扫描波前检测装置示意图如图1所示。
2、该方法的实验配置主要包括:扫描狭缝、待测反射镜以及成像探测器;该方法的主要实验步骤为:
3、a)在待测反射镜的上游,利用一狭缝将入射光卡成约10-20μm的细光束;
4、b)入射光经过狭缝,到达待测反射镜,经反射镜反射后,到达位于待测反射镜下游的成像探测器,成像探测器记录反射光在探测面上的位置;
5、c)移动狭缝,利用细光束在待测反射镜上沿子午方向进行扫描,并追踪记录反射光在成像探测器上的质心位置;
6、d)测量并记录待测反射镜与成像探测器之间的距离d。
7、假设反射光在成像探测器上的位置变化为δr,则经反射镜反射后的波前斜率变化为则待测反射镜的面形斜率变化为再对待测反射镜的面形斜率进行积分即可得到待测反射镜的面形高度分布。
8、传统波前检测方法存在的技术问题如下:
9、1)在基于刃边扫描定位的波前检测方法(如笔光束扫描波前检测方法)中,需要在全测量范围内进行扫描,在扫描过程中可能存在由光源引起的入射光指向性的不稳定,导致刃边在成像探测面上的位置发生改变,从而影响刃边或质心的定位测量,在这种情况下波前测量结果中就包含了光源指向不稳定的影响,降低了波前(面形)检测的精度。
10、2)在传统的笔光束扫描波前检测方法中,样品上的空间分辨受光源尺寸(光束相干性)和狭缝宽度共同影响。在光源尺寸较小的情况下,一般空间分辨率主要受限于狭缝尺寸,在近似于平行光入射的情况下,入射光束经过狭缝后形成细光束到达待测样品,则最小空间分辨尺寸近似为待测样品上细光束的尺寸,一般为10-20μm,在对一些微小元件(如crl、mll)进行检测时,这样的空间分辨是不能满足需求的。
11、3)在传统的笔光束扫描波前检测方法中,样品上的空间分辨主要受限于狭缝尺寸,为了能够获得较高空间分辨率,应尽可能地减小狭缝尺寸,但较小地狭缝尺寸会限制入射光通量,降低细光束强度分布曲线在成像探测器上的信噪比,影响定位精度,从而降低波前检测的精度。
12、4)在以往笔光束波前检测方法的研究工作中,利用狭缝的横向位移和光束在探测器成像面上的横向位移δr进行绝对模式的检测,通常将入射波前作为理想的球面波,但是当入射波前由于前端光学元件不完美而引入一定的畸变或缺陷,那么通过这种方法测量得到的波前往往包含了入射波前的影响,不能准确表征待测样品的面形,从而产生测量误差。
13、5)在对会导致出射光束翻转的样品进行测量时(如晶体单色器中的平晶),仅利用细光束质心定位,难以将有无待测样品两种情况下得到的波前在空间位置上对应,从而无法去除入射波前本身畸变或缺陷的影响,从而引入测量误差。
14、6)光线的偏转角(波前斜率)是根据扫描刃边(狭缝)的实际横向位移、扫描刃边(狭缝)在探测器成像面上投影的横向位移以及扫描刃边(狭缝)到探测器之间的距离计算得到的。在传统的笔光束扫描波前检测方法中,扫描刃边(狭缝)的实际横向位移根据扫描位移台的编码器反馈获得,通常精度在μm量级,即使扫描刃边(狭缝)在探测器成像面上投影的横向位移达到nm量级的定位精度,也难以实现亚μrad量级或更高的波前斜率检测精度。
15、7)在以往的基于笔光束扫描波前检测方法中,通常利用狭缝产生一个细光束,并移动狭缝在整个待测样品上进行全测量范围内的扫描,这种方法需要在整个测量区域内扫描,因而扫描行程长,耗时较长,检测效率低。
16、8)目前,基于笔光束扫描的波前检测方法,通常利用狭缝产生一个沿子午方向的细光束(沿弧矢方向是展宽的),然后沿子午方向进行扫描,在探测器成像面上所得到的定位信息也仅仅是沿子午方向的一维信息,因此在这种配置下难以实现二维波前的检测。
技术实现思路
1、针对现有技术中存在的问题,本发明的目的在于提供一种基于多刃边扫描的高效高精度波前检测方法及装置。
2、本发明具有如下特点:
3、1)为了达到更高的测量精度,我们提出引入固定刃边与扫描刃边结合的扫描方法来去除光源指向性不稳定的影响。在此结构中一个刃边作为固定刃,在测量过程中保持不动,另外的刃边作为扫描刃,在测量的全范围内进行扫描。在扫描过程中,成像探测器记录在探测器成像面上固定刃边与扫描刃边之间的距离而不是记录扫描刃边或质心在探测器上的位置,当入射光指向性发生改变,那么固定刃边与扫描刃边在探测器成像面上的投影位置均发生变化,则质心位置也会发生变化,但在小角近似的条件下,可以认为固定刃边与扫描刃边之间的距离不会随入射光指向性改变而发生变化,所以通过检测固定刃边和扫描刃边位置的这种方法可以去除光源指向性不稳定的影响。
4、2)为了提高检测的空间分辨率,本发明专利提出不利用狭缝形成的细光束质心进行定位,而是利用刃边进行定位,通过拟合刃边在成像探测器上的投影曲线来确定刃边的空间位置从而实现定位。在这种情况下空间分辨不受限于固定刃边与扫描刃边之间的距离(尺寸),只受单个刃边在待测样品上展宽的影响。而单个刃边在待测样品上的展宽只取决于光源尺寸,在光源尺寸较小且刃边十分靠近待测样品的情况下,展宽效应不明显,因此可以大程度的提高空间分辨率。
5、3)本发明专利不利用狭缝形成细光束来进行质心定位,而利用刃边进行定位,不形成狭缝,因此通过刃边的光通量不受限,所以在成像探测器上刃边投影的强度曲线具有较高的信噪比,有利于通过算法计算获得较高的刃边定位精度,从而提高波前检测的精度。
6、4)为了去除入射波前本身误差的影响,可以在光路中有待测样品和无待测样品两种情况下分别进行测量。在光路中有待测样品时,得到的测量结果包含了待测样品和入射光叠加后共同的波前信息;在光路中无待测样品时,得到的测量结果为入射光单独的波前信息,由两次测量结果相减即可去除入射光波前缺陷的影响,得到更为准确的待测样品面形(待测波前)。
7、但是在将有无待测样品两次测量的波前数据结果相减的过程中,需要严格将两次波前的空间位置对准(nm量级),如果仅仅依靠扫描台的定位精度(μm量级),则难以实现,因此我们引入激光干涉仪,以nm级的定位精度监测扫描位置,在后续数据处理过程中,可以利用激光干涉仪获取的扫描位置信息对有无待测样品两种情况下计算得到的波前空间分布进行修正,使得在两种情况下得到的波前在空间位置上能够对应,从而可以相减去除入射光波前缺陷的影响。
8、5)在本发明专利中固定刃在整个测量过程中,相较于入射光(波前)位置固定,因此即使在出现光束翻转的情况下,也可以通过定位固定刃边在成像探测器上的位置,来将有无待测样品两种情况下测量得到的波前(空间位置)对应起来;同时,激光干涉仪准确记录了在有无待测样品情况下扫描位置随扫描步数的变化,在数据处理过程中可以利用激光干涉仪记录的实际扫描位置数据将有无待测样品情况下测得波前的空间分布进行对应,从而可以去除入射光波前缺陷的影响,得到更为准确的待测样品面形(待测波前),解决了出现出射光光束翻转,难以去除入射参考波前缺陷影响的问题。
9、6)激光干涉仪的引入不仅可以将有无待测样品时测得的波前在空间位置上对应,实现去除入射参考波前缺陷影响的目的,而且对于单次测量而言,也可以提高波前测量精度。在本发明专利中提出,通过激光干涉仪的获取扫描刃边的横向位移,可以将扫描刃边横向位移的定位精度提高到nm量级,同时根据亚像素算法扫描刃边(狭缝)在探测器成像面上投影的横向位移也可以实现nm量级的定位精度,因此理论上可以将单次测量的波前检测精度提高到nrad量级。
10、7)为了提高检测效率,我们提出了利用多刃边扫描结构,在测量的局部范围内进行扫描,由于多个刃边可以测量得到不同区域内的波前信息,所以将测量得到的不同区域内的波前进行数据拼接即可得到全测量范围内的波前信息。这样可以极大的缩短扫描行程,减少扫描时间,提高检测效率。
11、8)为了实现二维波前检测,我们提出可以进行二维扫描,但在全测量范围内进行二维扫描需要花费大量的测试时间,效率非常低,几乎是不现实的。因此我们提出可以利用大周期二维光栅在局部区域内进行二维扫描,然后利用二维数据拼接,恢复出全测量范围内的二维波前,实现高效率的二维波前检测。
12、本发明的技术方案为:
13、一种基于多刃边扫描的高效高精度波前检测方法,其步骤包括:
14、1)根据待测样品确定测量范围,并调整待测样品在光路中的位置;制备多刃边扫描结构;所述多刃边扫描结构包括在垂直于测量方向上分布的n+1个刃边,其中一个刃边作为固定刃,在测量过程中保持不动;其余n个刃边作为扫描刃,在扫描过程中n个扫描刃互相之间的位置相对固定,相邻扫描刃边之间的距离固定为p,扫描区间应大于p,在扫描过程中各扫描刃对应不同的扫描区域,在测量过程中,所述多刃边扫描结构中的各扫描刃整体移动,扫描刃整体移动区域覆盖整个所述测量范围;沿光路方向上待测样品到成像探测器之间的距离为d;n为大于或等于2的自然数;
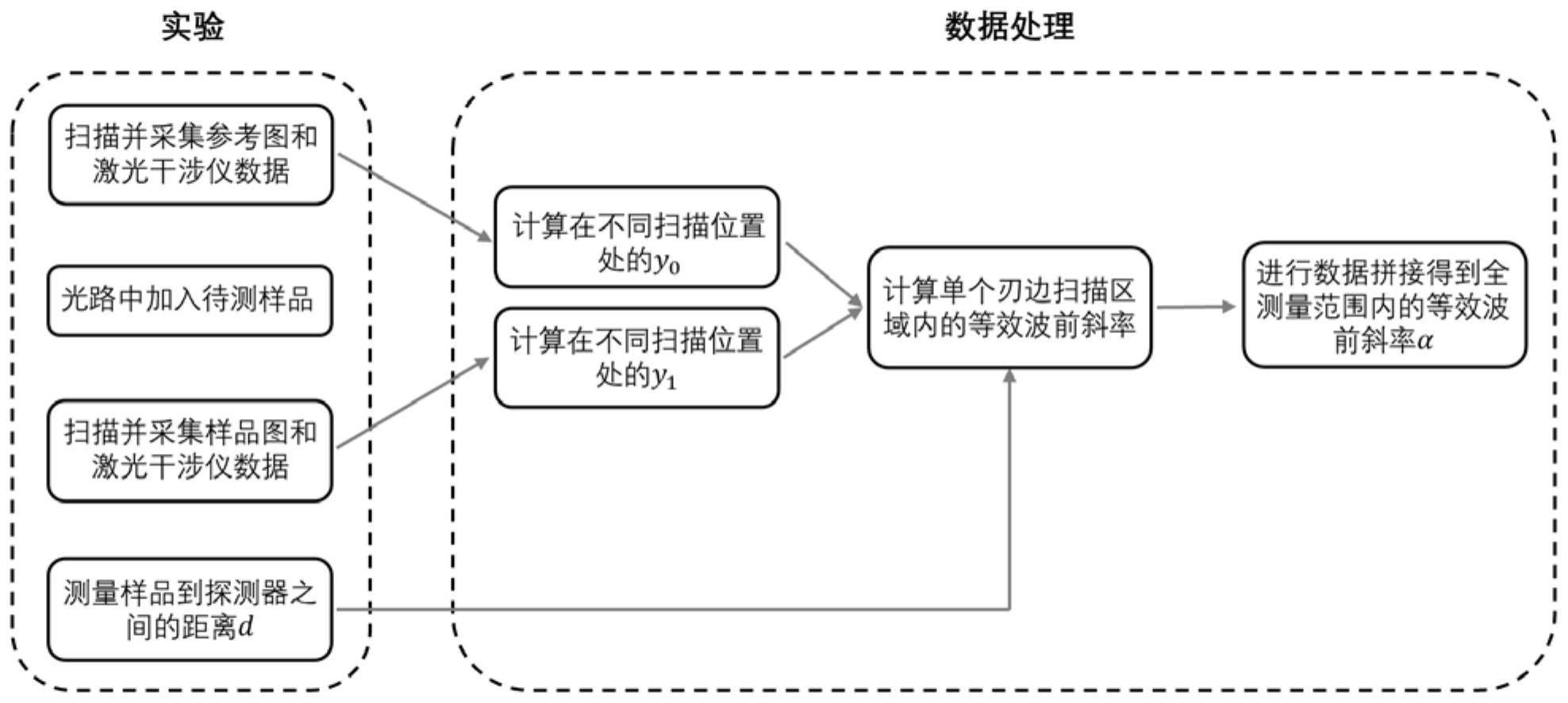
15、2)在不加入该待测样品的情况下,利用各所述扫描刃在其对应的区域内扫描移动,光束通过任意两相邻刃边之间的通光区域入射到成像探测器,在成像探测器上产生刃边的投影;所述成像探测器对每一个扫描位置生成一参考图,每张参考图中都包含全部扫描刃边和固定刃边的投影,同时利用激光干涉仪采集n个扫描刃边整体在每一个扫描位置处与固定刃边之间的距离dr,经过对所述扫描区间完成扫描后产生一组参考图和一组扫描刃边整体与固定刃边之间距离值并发送给所述数据处理单元;数据处理单元利用每一参考图求得该参考图中所有扫描刃边与固定刃边的投影位置,将第j个扫描刃边的投影位置与固定刃边的投影位置相减得到在每一个扫描位置处第j个扫描刃边与固定刃边之间的投影距离,由一组参考图得到第j个扫描刃边与固定刃边对应的一组投影距离值,然后利用激光干涉仪测得的数据对该组投影距离值进行修正,生成第j个扫描刃所对应的区域内每一设定扫描位置处所述成像探测器上第j个扫描刃边与固定刃边之间的投影距离y0j;j=1~n;
16、3)在光路中加入待测样品的情况下,利用各所述扫描刃在其对应的区域内扫描移动,光束通过任意两相邻刃边之间的通光区域入射到成像探测器,在成像探测器上产生刃边的投影;所述成像探测器对每一个扫描位置生成一样品图,每张样品图中都包含全部扫描刃边和固定刃边的投影,同时利用激光干涉仪采集n个扫描刃边整体在每一个扫描位置与固定刃边之间的距离ds,经过对所述扫描区间完成扫描后产生一组样品图和对应的一组扫描刃边整体与固定刃边之间距离值并发送给所述数据处理单元;数据处理单元利用每一样品图求得该样品图中所有扫描刃边与固定刃边的投影位置,将第j个扫描刃边的投影位置与固定刃边的投影位置相减得到每一个扫描位置处第j个扫描刃边与固定刃边之间的投影距离,由一组样品图得到第j个扫描刃边与固定刃边对应的一组投影距离值,然后利用激光干涉仪测得的数据对该组投影距离值进行修正,生成第j个扫描刃所对应的区域内每一设定扫描位置处所述成像探测器上第j个扫描刃边与固定刃边之间的投影距离y1j;j=1~n;
17、4)所述数据处理单元根据第j个扫描刃所对应的区域内同一设定扫描位置有无待测样品时对应的投影距离y0j、y1j,利用公式计算出第j个扫描刃所对应的待测区域在对应设定扫描位置处的光线偏转角αj;j=1~n;其中y1j-y0j为光线偏转角所引起的探测器成像面上的横向位移;
18、5)对不同扫描刃边测得不同区域的光线偏转角αj进行数据拼接得到全测量范围内的光线偏转角α;
19、6)根据全测量范围内的光线偏转角α计算得到该待测样品的面形高度分布。
20、进一步的,利用激光干涉仪采集n个扫描刃边整体与固定刃边在垂直于光传播方向上的距离,作为对应的距离dr或距离ds;其中各所述扫描刃边与所述激光干涉仪的反射镜相对固定,固定刃边与所述激光干涉仪的光学头相对固定。
21、进一步的,所述待测样品为测量时引起出射光束翻转的样品或不引起出射光束翻转的样品。
22、一种基于多刃边扫描的高效高精度波前检测装置,其特征在于,包括多刃边扫描结构、激光干涉仪和成像探测器;
23、所述多刃边扫描结构包括在垂直于测量方向上分布的n+1个刃边,其中一个刃边作为固定刃,在测量过程中保持不动;其余n个刃边作为扫描刃,n个扫描刃互相之间的位置相对固定,相邻扫描刃边之间的距离固定为p;对每一扫描刃边,设定的扫描区域不小于p,在测量过程中,所述多刃边扫描结构中的各扫描刃在扫描区域内整体移动,扫描刃整体移动区域覆盖整个测量范围;沿光路方向上待测样品到成像探测器之间的距离为d;n为大于或等于2的自然数;
24、所述扫描刃,用于在对应的设定区域内移动,光束通过扫描刃边与固定刃边之间的通光区域入射到成像探测器,在成像探测器上产生刃边的投影;在不加入待测样品时,所述成像探测器对每一个扫描位置生成一参考图,每张参考图中都包含全部扫描刃边和固定刃边的投影,经过对所述扫描区间完成扫描后产生一组参考图并发送给所述数据处理单元;在光路中加入待测样品时,所述成像探测器对每一个扫描位置生成一样品图,每张样品图中都包含全部扫描刃边和固定刃边的投影,经过对所述扫描区间完成扫描后产生一组样品图并发送给所述数据处理单元;
25、所述激光干涉仪,用于采集多扫描刃边整体在每一个扫描位置处与固定刃边之间的距离;在不加入待测样品时,采集多扫描刃边整体与固定刃边之间的距离dr,经过对所述扫描区间完成扫描后产生第一组距离值并发送给所述数据处理单元;在加入待测样品时,采集多扫描刃边整体在每一个扫描位置处与固定刃边之间的距离,经过对所述扫描区间完成扫描后产生第二组距离值并发送给所述数据处理单元;
26、所述数据处理单元根据每一参考图求得该参考图中所有扫描刃边与固定刃边的投影位置,将第j个扫描刃边的投影位置与固定刃边的投影位置相减得到第j个扫描刃边与固定刃边之间的投影距离,由一组参考图得到第j个扫描刃边与固定刃边对应的一组投影距离值,然后利用激光干涉仪测得的数据对该组投影距离值进行修正,生成第j个扫描刃所对应的区域内每一设定扫描位置处所述成像探测器上第j个扫描刃边与固定刃边之间的投影距离y0j;以及根据每一样品图求得该样品图中所有扫描刃边与固定刃边的投影位置,将第j个扫描刃边的投影位置与固定刃边的投影位置相减得到第j个扫描刃边与固定刃边之间的投影距离,由一组样品图得到第j个扫描刃边与固定刃边对应的一组投影距离值,然后利用激光干涉仪测得的数据对该组投影距离值进行修正,生成第j个扫描刃所对应的区域内每一设定扫描位置处所述成像探测器上第j个扫描刃边与固定刃边之间的投影距离y1j;然后根据第j个扫描刃所对应的区域内同一设定扫描位置有无待测样品时对应的投影距离y0j、y1j,利用公式计算出第j个扫描刃所对应的待测区域在对应设定扫描位置的光线偏转角αj;对不同扫描刃边测得不同区域的光线偏转角αj进行数据拼接得到全测量范围内的光线偏转角α;j=1~n;其中y1j-y0j为光线偏转角所引起的探测器成像面上的横向位移;根据全测量范围内的光线偏转角α计算得到该待测样品的面形高度分布。
27、一种基于多刃边扫描的高效高精度波前检测方法,其步骤包括:
28、1)根据待测样品确定测量范围,并调整待测样品在光路中的位置;制备二维扫描结构,所述二维扫描结构中的第一维度方向上包括n+1个刃边,其中一个刃边作为固定刃,在测量过程中保持不动,其余n个刃边作为扫描刃,相邻扫描刃之间的距离固定为p1,在该第一维度方向上的扫描区间不小于p1,扫描刃用于沿第一维度方向在所述扫描区间内一设定区域内移动,在扫描过程中n个扫描刃互相之间的位置相对固定,在扫描过程中各扫描刃对应不同的扫描区域,n个扫描刃整体移动区域覆盖整个该第一维度方向上的测量范围;所述二维扫描结构中的第二维度方向上包括m+1个刃边,其中一个刃边作为固定刃,在测量过程中保持不动,其余m个刃边作为扫描刃,相邻扫描刃之间的距离固定为p2,在该第二维度方向上的扫描区间不小于p2,扫描刃用于沿第二维度方向在所述扫描区间内一设定区域内移动,在扫描过程中m个扫描刃互相之间的位置相对固定,在扫描过程中各扫描刃对应不同的扫描区域,m个扫描刃整体移动区域覆盖整个该第二维度方向上的测量范围;沿光路方向上待测样品到成像探测器之间的距离为d;n、m均为大于或等于2的自然数;
29、2)在不加入该待测样品的情况下,利用各所述扫描刃在其对应的区域内移动,光束通过任意两相邻刃边之间的通光区域入射到成像探测器,在成像探测器上产生刃边的投影;
30、所述成像探测器在每一维度方向上对每一个扫描位置生成一参考图,每张参考图中都包含全部扫描刃边和固定刃边的投影,同时利用激光干涉仪采集在该维度方向上在每一个扫描位置多扫描刃边整体与固定刃边之间的距离dr1,完成在该维度上扫描区间的扫描后产生一组参考图和一组多扫描刃边整体与固定刃边之间距离值并发送给所述数据处理单元;数据处理单元利用每一参考图求得在该维度方向上该参考图中所有扫描刃边与固定刃边的投影位置,将第i个扫描刃边的投影位置与固定刃边的投影位置相减得到第i个扫描刃边与固定刃边之间的投影距离,由一组参考图得到第i个扫描刃边对应的一组投影距离值,然后利用激光干涉仪测得的数据对该组投影距离值进行修正,生成第i个扫描刃所对应的区域内每一设定扫描位置处所述成像探测器上第i个扫描刃边与固定刃边之间的投影距离y0i;第i个扫描刃边为所述二维扫描结构中的第一维度方向上的扫描刃边或第二维度方向上的扫描刃边;
31、3)在光路中加入待测样品的情况下,利用各所述扫描刃在其对应的区域内移动,光束通过任意两相邻刃边之间的通光区域入射到成像探测器,在成像探测器上产生刃边的投影;
32、所述成像探测器在每一维度方向上对每一个扫描位置生成一样品图,每张样品图中都包含全部扫描刃边和固定刃边的投影,同时利用激光干涉仪采集在该维度方向上在每一个扫描位置多扫描刃边整体与固定刃边之间的距离ds1,完成在该维度上扫描区间的扫描后产生一组样品图和一组多扫描刃边整体与固定刃边之间距离值并发送给所述数据处理单元;数据处理单元利用每一样品图求得在该维度方向上该样品图中所有扫描刃边与固定刃边的投影位置,将第i个扫描刃边的投影位置与固定刃边的投影位置相减得到第i个扫描刃边与固定刃边之间的投影距离,由一组样品图得到第i个扫描刃边对应的一组投影距离值,然后利用激光干涉仪测得的数据对该组投影距离值进行修正,生成第i个扫描刃所对应的区域内每一设定扫描位置处所述成像探测器上第n个扫描刃边与固定刃边之间的投影距离y1i;
33、4)在每一个维度方向上,所述数据处理单元根据第i个扫描刃所对应的区域内同一设定扫描位置有无待测样品时对应的两投影距离y0i、y1i,利用公式计算出第i个扫描刃所对应的待测区域在对应设定扫描位置的光线偏转角αi;
34、5)在每一个维度方向上,对不同扫描刃边测得不同区域的光线偏转角进行数据拼接得到全测量范围内的光线偏转角α;
35、6)利用两维度方向上的光线偏转角通过梯度重建曲面的算法计算得到该待测样品的二维面形分布。
36、进一步的,在第一维度方向上利用激光干涉仪采集在该维度方向上多扫描刃边整体与固定刃边在垂直于光传播方向上的距离,作为对应的距离dr1或距离ds1;在第二维度方向上利用激光干涉仪采集在该维度方向上多扫描刃边整体与固定刃边在垂直于光传播方向上的距离,作为对应的距离dr2或距离ds2。
37、一种基于多刃边扫描的高效高精度波前检测装置,其特征在于,包括二维多刃边扫描结构、激光干涉仪和成像探测器;
38、所述二维多刃边扫描结构中的第一维度方向上包括n+1个刃边,其中一个刃边作为固定刃,在测量过程中保持不动,其余n个刃边作为扫描刃,用于沿第一维度方向在所述扫描区间内一设定区域内移动;所述二维多刃边扫描结构中的第二维度方向上包括m+1个刃边,其中一个刃边作为固定刃,在测量过程中保持不动,其余m个刃边作为扫描刃,用于沿第二维度方向在所述扫描区间内一设定区域内移动;同一维度方向上的各所述扫描刃所移动区域覆盖整个所述扫描区间;沿光路方向上待测样品到成像探测器之间的距离为d;n、m均为大于或等于2的自然数;
39、所述扫描刃,用于在对应的设定区域内移动,光束通过所述扫描刃边与所述固定刃边之间的通光区域入射到成像探测器,在成像探测器上产生刃边的投影;在不加入待测样品时,所述成像探测器对每一维度方向上每一个扫描位置生成一参考图,每张参考图中都包含全部扫描刃边和固定刃边的投影,完成在该维度上扫描区间的扫描后产生一组参考图;在光路中加入待测样品时,所述成像探测器对每一维度方向上每一个扫描位置生成一样品图,完成在该维度上扫描区间的扫描后产生一组参考图;
40、所述激光干涉仪,用于采集每一扫描位置时扫描刃与固定刃在垂直于光传播方向上的距离并发送给所述数据处理单元;在不加入待测样品时,采集每一维度方向上每一个扫描位置处多扫描刃边整体与固定刃边之间的距离dr,完成在对应维度方向上扫描区间的扫描后得到一组距离值并发送给所述数据处理单元;在光路中加入待测样品时,采集每一维度方向上每一个扫描位置处多扫描刃边整体与固定刃边之间的距离ds,完成在对应维度方向上扫描区间的扫描后得到一组距离值并发送给所述数据处理单元;
41、所述数据处理单元,用于利用每一维度方向上每一参考图求得在对应维度方向上该参考图中所有扫描刃边与固定刃边的投影位置,将第i个扫描刃边的投影位置与固定刃边的投影位置相减得到第i个扫描刃边与固定刃边之间的投影距离,根据各参考图得到第i个扫描刃边对应的一组投影距离值,然后利用激光干涉仪测得的数据对该组投影距离值进行修正,生成第i个扫描刃所对应的区域内每一设定扫描位置处所述成像探测器上第i个扫描刃边与固定刃边之间的投影距离y0i;利用每一维度方向上每一样品图求得在对应维度方向上该参考图中所有扫描刃边与固定刃边的投影位置,将第i个扫描刃边的投影位置与固定刃边的投影位置相减得到第i个扫描刃边与固定刃边之间的投影距离,根据各样品图得到第i个扫描刃边对应的一组投影距离值,然后利用激光干涉仪测得的数据对该组投影距离值进行修正,生成第i个扫描刃所对应的区域内每一设定扫描位置处所述成像探测器上第i个扫描刃边与固定刃边之间的投影距离y1i;然后根据第i个扫描刃所对应的区域内同一设定扫描位置有无待测样品时对应的两投影距离y0y、y1i,利用公式计算出第i个扫描刃所对应的待测区域在对应设定扫描位置的光线偏转角αi;在每一个维度方向上,对每一扫描刃对应各设定扫描位置的光线偏转角进行数据拼接得到对应扫描刃全测量范围内的光线偏转角;利用两维度方向上的光线偏转角通过梯度重建曲面的算法计算得到该待测样品的二维面形分布;第i个扫描刃边为所述二维多刃边扫描结构中的第一维度方向上的扫描刃边或第二维度方向上的扫描刃边。
42、本发明的优点如下:
43、a)利用刃边形成带有定位信息的结构光,该结构光的形成不依赖于光源的相干性,实现了不受限于光源相干性的高精度在线波前检测技术方法;
44、b)通过引入固定刃边,可表征出光源指向性的不稳定,通过记录扫描刃边和固定刃边之间距离随扫描步数的变化,而不是质心位置的变化,解决了光源指向性不稳定的问题;
45、c)在利用固定刃边与扫描刃边结合的结构进行扫描过程中,定位信息来源于刃边而不是光束质心,空间分辨只受单个刃边在待测样品上展宽的影响,可以大程度的提高空间分辨率;
46、d)利用刃边进行扫描,固定刃边与扫描刃边之间不形成狭缝,到达样品和探测器上的光通量不受限制,在成像探测器上刃边投影的强度曲线具有较高的信噪比,有利于通过算法计算获得较高的刃边定位精度,提高波前检测的精度;
47、e)通过将有无待测样品时测得的波前相减,可以去除入射参考波前本身畸变或缺陷的影响,同时通过引入激光干涉仪,可以准确的记录扫描位置,可以将有无待测样品时测得波前的空间分布对应起来,可以准确的去除入射参考波前缺陷的影响;
48、f)通过固定刃边以及激光干涉仪的引入,在出现样品图翻转的情况下,也可以将有无待测样品时测得波前的空间分布对应起来,从而可以去除入射参考波前缺陷的影响,解决了待测样品引起光束翻转时的波前准确测量问题;
49、g)通过激光干涉仪的获取扫描刃边的横向位移,可以将扫描刃边横向位移的定位精度提高到nm量级,同时根据亚像素算法扫描刃边(狭缝)在探测器成像面上投影的横向位移也可以实现nm量级的定位精度,因此在本发明专利中,理论上单次测量的波前检测精度可以提高到nrad量级;
50、h)由于该技术方案在测量光线在探测面上的横向位移δr时,可以通过测量刃边在成像探测器上的位置直接获得,不需要进行复杂计算,更不会出现图像变形导致刃边在成像探测器上的位置无法测量的情况,因此该技术方案可以实现大曲率、强弯曲波前的高精度检测;
51、i)利用多刃边扫描结构,在测量的局部范围内进行扫描,由于多个刃边可以测量得到不同区域内的波前信息,所以将测量得到的不同区域内的波前进行数据拼接即可得到全测量范围内的波前信息,极大的缩短扫描行程,减少扫描时间,提高检测效率;
52、j)利用二维大周期光栅,在在局部区域内进行二维扫描,然后利用二维数据拼接,恢复出全测量范围内的二维波前,实现高效率的二维波前检测。
- 还没有人留言评论。精彩留言会获得点赞!