一种无人机航空摄影测量数据的处理方法与流程
本发明涉及无人机航空摄影,具体是一种无人机航空摄影测量数据的处理方法。
背景技术:
1、无人机是通过无线电遥控设备或机载计算机程控系统进行操控的不载人飞行器,无人机结构简单、使用成本低,在突发事情应急、预警方面有很大的作用,无人机航拍摄影是以无人机作为空中平台,以机载遥感设备获取信息,用计算机对图像信息进行处理,并按照一定精度要求制作成图像,无人机航空摄影测量数据主要指无人机在航空摄影前后的机体状况检测数据;
2、目前在进行无人机航空摄影时,主要通过人工操控以进行无人机的运动和拍摄,难以进行相关测量数据的有效处理,无法自动进行无人机在布控点的位置校正,以及无法在航空摄影前进行前置策略分析以判断航拍环境状况和无人机状况是否正常,难以保证所拍摄图像的清晰和无人机的运行安全,并且无法将无人机的数据传输状况进行检测分析,不利于后续进行无人机的维护监管;
3、针对上述的技术缺陷,现提出一种解决方案。
技术实现思路
1、本发明的目的在于提供一种无人机航空摄影测量数据的处理方法,解决了现有技术无法自动进行无人机在布控点的位置校正以及无法在航空摄影前进行前置策略分析,难以保证所拍摄图像的清晰和无人机的运行安全,且无法将无人机的数据传输状况进行检测分析,不利于后续维护监管的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种无人机航空摄影测量数据的处理方法,包括以下步骤:
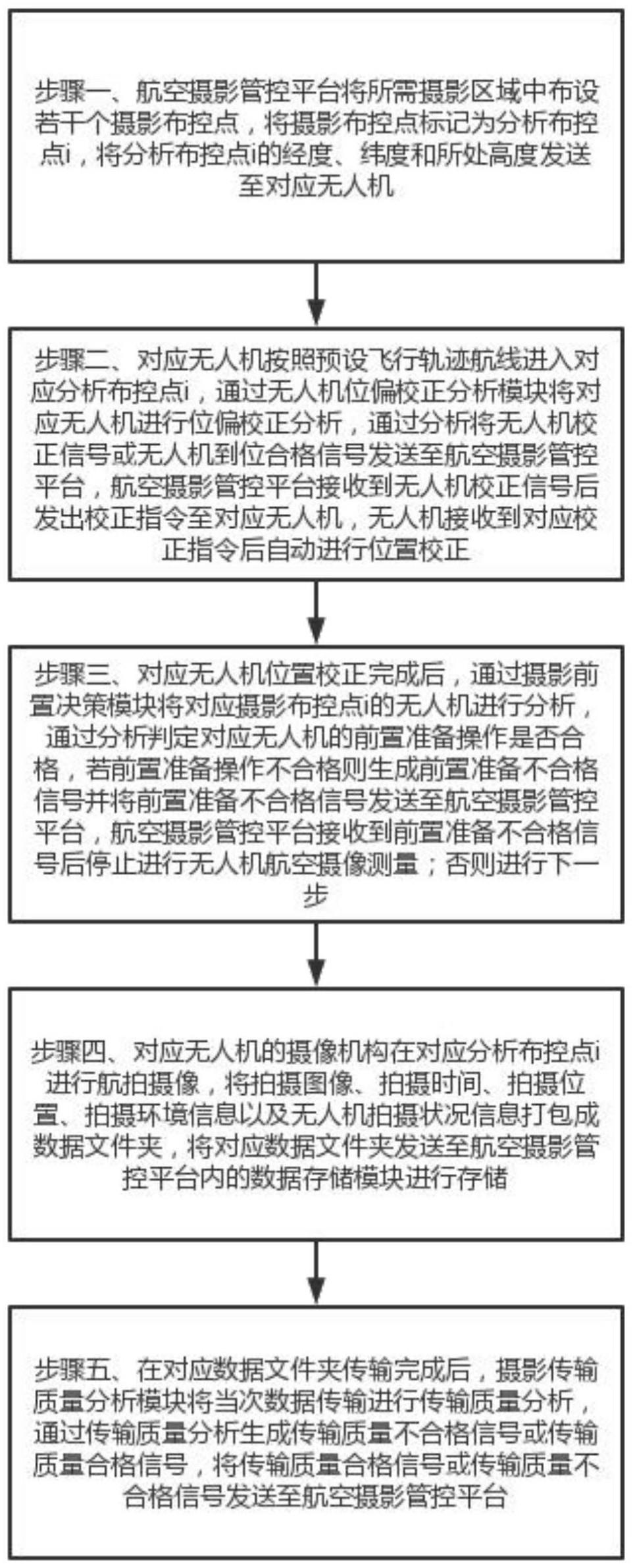
4、步骤一、航空摄影管控平台将所需摄影区域中布设若干个摄影布控点,将摄影布控点标记为分析布控点i,i={1,2,…,n},n表示摄影布控点的数量且n为大于1的自然数,将分析布控点i的经度、纬度和所处高度发送至对应无人机;
5、步骤二、对应无人机按照预设飞行轨迹航线进入对应分析布控点i,通过无人机位偏校正分析模块将对应无人机进行位偏校正分析,通过分析将无人机校正信号或无人机到位合格信号发送至航空摄影管控平台,航空摄影管控平台接收到无人机校正信号后发出校正指令至对应无人机,无人机接收到对应校正指令后自动进行位置校正;
6、步骤三、对应无人机位置校正完成后,通过摄影前置决策模块将对应摄影布控点i的无人机进行分析,通过分析判定对应无人机的前置准备操作是否合格,若前置准备操作不合格则生成前置准备不合格信号并将前置准备不合格信号发送至航空摄影管控平台,航空摄影管控平台接收到前置准备不合格信号后停止进行无人机航空摄像测量;否则进行下一步;
7、步骤四、对应无人机的摄像机构在对应分析布控点i进行航拍摄像,将拍摄图像、拍摄时间、拍摄位置、拍摄环境信息以及无人机拍摄状况信息打包成数据文件夹,将对应数据文件夹发送至航空摄影管控平台内的数据存储模块进行存储;
8、步骤五、在对应数据文件夹传输完成后,摄影传输质量分析模块将当次数据传输进行传输质量分析,通过传输质量分析生成传输质量不合格信号或传输质量合格信号,将传输质量合格信号或传输质量不合格信号发送至航空摄影管控平台。
9、进一步的,无人机位偏校正分析模块的具体运行过程包括:
10、对应无人机按照预设飞行轨迹航线进入对应分析布控点i,获取到对应无人机的实际经度、实际纬度和实际高度,在进行摄像前将无人机实际经度与分析布控点i的经度进行差值计算并取绝对值获取到经度位差系数,将无人机实际纬度与分析布控点i的纬度进行差值计算并取绝对值获取到纬度位差系数,以及将无人机的实际高度与分析布控点i所处高度进行差值计算获取到高度位差系数;若对应无人机的经度位差系数、纬度位差系数和高度位差系数中存在至少一项超过对应预设阈值,则生成无人机校正信号。
11、进一步的,若对应无人机的经度位差系数、纬度位差系数和高度位差系数均未超过对应预设阈值,则将预设经度位差系数阈值与经度位差系数进行差值计算获取到经度阈差值,将预设纬度位差系数阈值与纬度位差系数进行差值计算获取到纬度阈差值,将预设高度位差系数阈值与高度位差系数进行差值计算获取到高度阈差值;
12、将经度阈差值、纬度阈差值和高度阈差值进行数值计算获取到布控到位不合格系数,若布控到位不合格系数未超过预设布控到位不合格系数阈值,则生成无人机校正信号,若布控到位不合格系数超过预设布控到位不合格系数阈值,则生成无人机到位合格信号,将无人机校正信号和无人机到位合格信号经航空摄影管控平台发送至对应无人机,对应无人机接收到无人机校正信号后进行位置校正。
13、进一步的,摄影前置决策模块的具体运行过程包括:
14、通过摄影环境检测分析获取到无人机在对应分析布控点i的环境决策值,将环境决策值与预设环境决策阈值进行数值比较,若环境决策值超过预设环境决策阈值,则生成前置准备不合格信号,若环境决策值未超过预设环境决策阈值,则获取到对应无人机在对应分析布控点i的振动频率、振动幅度以及水平度,将振动频率、振动幅度以及水平度进行数值计算获取到机体决策值,将机体决策值与预设机体决策阈值进行数值比较,若机体决策值超过预设机体决策阈值,则生成前置准备不合格信号。
15、进一步的,摄影环境检测分析的具体分析过程如下:
16、获取到对应无人机在对应分析布控点i的光照亮度数据,调取预设摄像适宜光照亮度范围并将预设摄影适宜光照亮度范围的最大值和最小值进行均值计算获取到最适亮度值,将光照亮度数据与最适亮度值进行差值计算并取绝对值获取到亮度偏差数据,以及获取到对应无人机在对应分析布控点i的风速数据和空气能见度数据,将亮度偏差数据、风速数据与空气能见度数据进行数值计算获取到环境决策值。
17、进一步的,若机体决策值未超过预设机体决策阈值,则获取到对应无人机内部多个位置处的温度,并将无人机内部多个位置处的温度进行求和取平均值获取到机温平均值,将温度超过预设温度阈值的位置标记为温异点,获取到温异点的数目并将温异点的数目与进行温度采集的位置数目进行比值计算生成不良温点占比值,以及获取到对应无人机所产生的噪音分贝值,将机温平均值、不良温点占比值与噪音分贝值进行数值计算后获取到机体运况值,将机体运况值与预设机体运况阈值进行数值比较,若机体运况值超过预设机体运况阈值,则生成无人机预警信号。
18、进一步的,若机体运况值未超过预设机体运况阈值,则设定若干个检测时段,获取到对应检测时段无人机的耗电量,将若干个检测时段的耗电量进行求和取平均值获取到无人机耗电均值,以及将若干个检测时段的耗电量进行方差计算获取到无人机耗电波动值,将无人机耗电均值和无人机耗电波动值与预设无人机耗电均值范围和预设无人机耗电波动阈值分别进行数值比较,若无人机耗电均值未处于预设无人机耗电均值范围内或无人机耗电波动值超过预设无人机耗电波动阈值,则生成无人机预警信号,否则不生成无人机预警信号。
19、进一步的,摄影传输质量分析模块的具体运行过程包括:
20、对应无人机的摄像机构在对应分析布控点i航拍摄像完成后,将数据文件夹发送至航空摄影管控平台,获取到对应无人机在对应分析布控点i进行数据传输的开始时刻以及结束时刻,将结束时刻以及开始时刻进行差值计算获取到传输时长值,以及获取到对应数据文件夹所占用的内存值,将对应数据文件夹所占用的内存值与传输时长值进行比值计算获取到数据传输效率系数,若数据传输效率系数未超过预设数据传输效率阈值,则生成传输质量不合格信号。
21、进一步的,若数据传输效率系数超过预设数据传输效率阈值,则将数据传输效率系数与预设数据传输效率阈值进行差值计算获取到传输效率阈差值,以及获取到传输过程中若干个检测时点的数据传输速度,将若干个检测时点的数据传输速度进行方差计算获取到传输速度波动系数,将传输效率阈差值与传输速度波动系数进行数值计算获取到传输质量系数,若传输质量系数超过预设传输质量系数阈值,则生成传输质量合格信号,否则生成传输质量不合格信号。
22、进一步的,航空摄影监管平台通信连接无人机监管终端,航空摄影监管平台将数据文件夹发送至无人机监管终端,将无人机校正信号或无人机到位合格信号、前置准备不合格信号、无人机预警信号以及传输质量不合格信号或传输质量合格信号发送至无人机监管终端。
23、与现有技术相比,本发明的有益效果是:
24、1、本发明中,通过无人机位偏校正分析模块将对应无人机进行位偏校正分析并将无人机校正信号或无人机到位合格信号发送至航空摄影管控平台,在接收到无人机校正信号后使无人机自动进行位置校正,实现无人机航空摄影前的位置分析并自动校正调节;通过摄影前置决策模块将对应摄影布控点i的无人机进行环境决策分析和机体决策分析以判定对应无人机的前置准备操作是否合格,有助于及时停止无人机航空摄像测量,进一步保障航空摄影效果,以及通过分析判定对应无人机是否存在运行异常,方便对应监管人员后续及时进行无人机的维护检修,降低对应无人机所存在的安全隐患;
25、2、本发明中,通过摄影传输质量分析模块将当次数据传输进行传输质量分析并生成传输质量不合格信号或传输质量合格信号,将传输质量合格信号或传输质量不合格信号发送至航空摄影管控平台,以及通过航空摄影管控平台将传输质量不合格信号或传输质量合格信号发送至无人机监管终端,有助于监管人员及时了解数据传输状况,方便对应监管人员后续进行针对性的维护检修,以保证对应无人机后续的数据传输稳定性和高效性。
- 还没有人留言评论。精彩留言会获得点赞!