一种基于人工大猩猩部队优化算法的路径规划方法
本发明涉及移动机器人路径规划,特别是一种基于人工大猩猩部队优化算法的路径规划方法。
背景技术:
1、机器人路径规划是智能导航的重要组成部分,具体是指在一个含有一定障碍物的空间内,从起始点找到前往目标点的一条无碰撞最优路径或者是较优路径,实现移动机器人避障并快速到达目标点主要在于对相关算法的改进优化或者开发一种由于前任算法的新的路径规划算法。
2、随着科技的发展,机器人路径规划相关的技术越来越成熟,近年来,仿生群智能算法异军突起,在机器人路径规划中应用并取得显著的效果,诸如遗传算法、蚁群算法、粒子群算法、鲸鱼优化算法等。遗传算法是最早提出的仿生群智能算法,在机器人路径规划中有良好效果,但其局部搜索能力较弱,往往得到的只是次优解而非最优解,且运算时占用较大的内部储存空间。蚁群算法在路径规划中有很强的鲁棒性,但其参数设置复杂,易出现早熟停滞行为,粒子群算法在路径规划中也具有良好的效果,但其搜索也容易发生早起收敛且容易陷入局部最优解。
技术实现思路
1、针对上述缺陷,本发明提出了一种基于人工大猩猩部队优化算法的路径规划方法,其目的在于解决了传统机器人路径规划算法中局部搜索能力较弱以及容易陷入局部最优解的问题。
2、为达此目的,本发明采用以下技术方案:
3、一种基于人工大猩猩部队优化算法的路径规划方法,包括以下步骤:
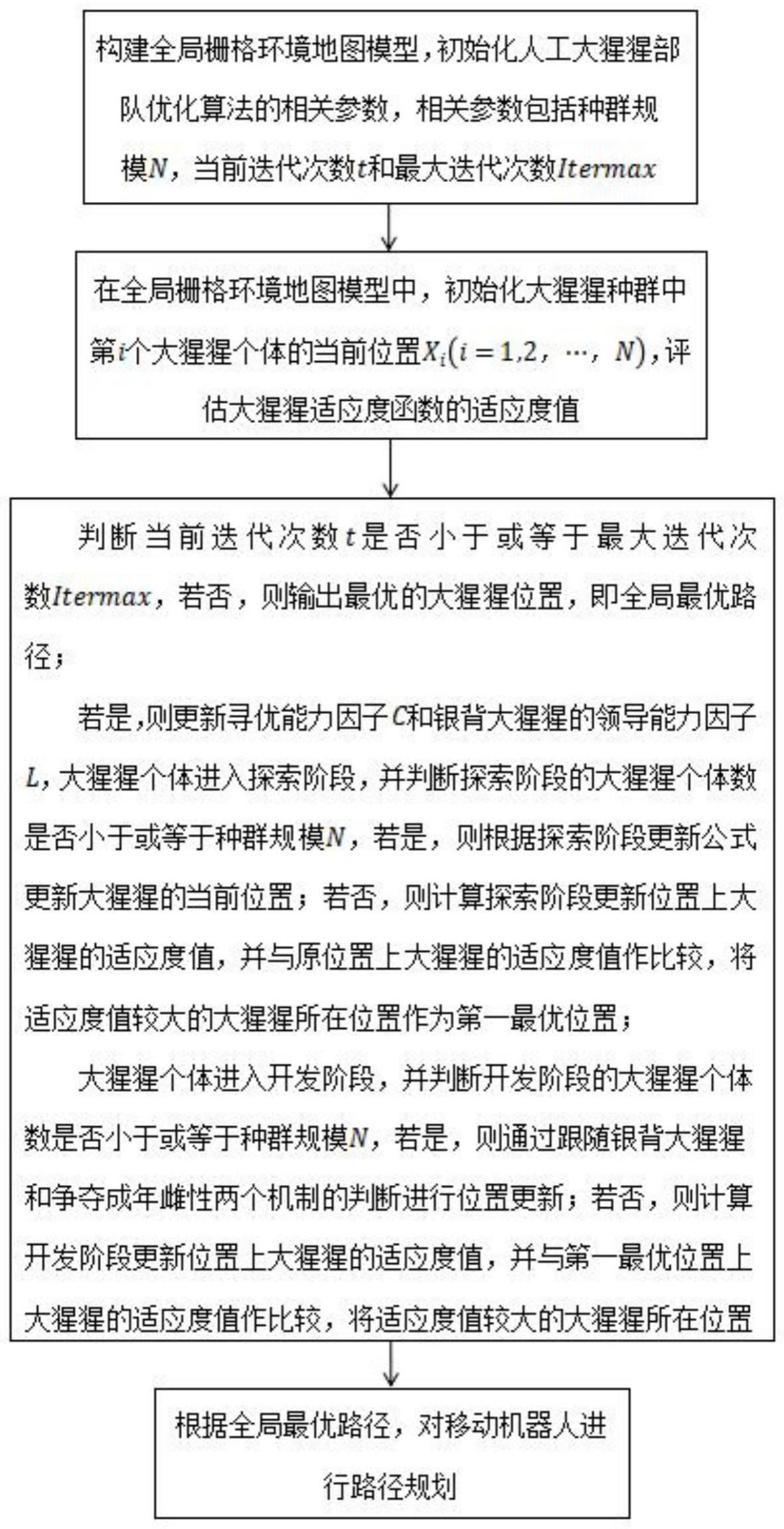
4、步骤s1:构建全局栅格环境地图模型,初始化人工大猩猩部队优化算法的相关参数,相关参数包括种群规模n,当前迭代次数t和最大迭代次数itermax;
5、步骤s2:在全局栅格环境地图模型中,初始化大猩猩种群中第i个大猩猩个体的当前位置xi(i=1,2,…,n),评估大猩猩适应度函数的适应度值;
6、步骤s3:判断当前迭代次数t是否小于或等于最大迭代次数itermax,若否,则输出最优的大猩猩位置,即全局最优路径;
7、若是,则更新寻优能力因子c和银背大猩猩的领导能力因子l,大猩猩个体进入探索阶段,并判断探索阶段的大猩猩个体数是否小于或等于种群规模n,若是,则根据探索阶段更新公式更新大猩猩的当前位置;若否,则计算探索阶段更新位置上大猩猩的适应度值,并与原位置上大猩猩的适应度值作比较,将适应度值较大的大猩猩所在位置作为第一最优位置;
8、大猩猩个体进入开发阶段,并判断开发阶段的大猩猩个体数是否小于或等于种群规模n,若是,则通过跟随银背大猩猩和争夺成年雌性两个机制的判断进行位置更新;若否,则计算开发阶段更新位置上大猩猩的适应度值,并与第一最优位置上大猩猩的适应度值作比较,将适应度值较大的大猩猩所在位置作为第二最优位置,即全局最优路径;
9、步骤s4:根据全局最优路径,对移动机器人进行路径规划。
10、优选地,在步骤s3中,寻优能力因子c的具体计算公式如下:
11、
12、其中,c为寻优能力因子;f为寻优能力的相关系数,由f=cos(2×r4)+1计算得出,r4为每次迭代更新的随机数,范围在0~1;t为当前迭代次数,itermax为最大迭代次数;
13、银背大猩猩的领导能力因子l的具体计算公式如下:
14、l=c×l
15、其中,l为银背大猩猩的领导能力因子;c为寻优能力因子;l为随机数值,范围在-1~1。
16、优选地,在步骤s3中,根据探索阶段更新公式更新大猩猩的当前位置,其中,探索阶段更新公式如下:
17、
18、其中,gx(t+1)为下次迭代时,大猩猩个体的候选位置向量;x(t)是大猩猩个体的当前位置向量;r1、r2、r3和rand为每次迭代中,更新的从0到1的随机值;p是一个从0到1的随机值,决定了探索阶段迁移至未知位置的概率;ub和lb分别为变量的上界和下界;xr(t)为在rand≥0.5时,更新公式按移动至其他大猩猩的机制,从原有的整个种群中随机选择的一组大猩猩中的一员;gxr(t)为在rand<0.5时,更新公式按向已知位置迁移的机制,从原有的整个种群中随机选择的一组大猩猩中的一员;
19、h=z×x(t),z为问题维度的随机值,在寻优能力因子c的范围内取随机值,范围是[-c~c],h为当前代在随机维度下位置向量。
20、优选地,在步骤s3中,通过跟随银背大猩猩和争夺成年雌性两个机制的判断进行位置更新,具体包括以下子步骤:
21、判断寻优能力因子c是否大于或等于选择机制的随机尺度因子w,若是,则利用跟随银背大猩猩机制的位置更新公式,更新大猩猩的位置;若否,利用争取成年雌性机制的位置更新公式,更新大猩猩的位置;
22、其中,跟随银背大猩猩机制的位置更新公式如下:
23、gx(t+1)=l×m×(x(t)-xsliverback)+x(t)
24、其中,gx(t+1)为下次迭代时,大猩猩个体的候选位置向量;x(t)为大猩猩个体当前位置向量;xsliverback为银背大猩猩的位置向量;l为银背大猩猩领导能力因子;
25、m为种群在第t次迭代时的平均候选位置向量的跟随系数,具体的计算公式如下:
26、
27、其中,gxi(t)为每个大猩猩个体在第t次迭代时的候选位置向量;g为常数,由式g=2l得出,l为银背大猩猩领导能力因子;n为种群规模;
28、争取成年雌性机制的位置更新公式如下:
29、gx(t+1)=xsliverback-(xsliverback×q-x(t)×q)×a
30、其中,gx(t+1)为下次迭代时,大猩猩个体的候选位置向量;xsliverback为银背大猩猩的位置向量;x(t)为大猩猩当前的位置向量;q为暴力冲突因子,q=2×r5-1,r5为[0~1]区间的随机值;a为冲突中暴力程度的系数向量,其中,a=β×e,β是优化操作前给定的参数值,表示暴力程度的系数向量a与暴力对解决问题维度的影响系数e的比例关系;e为暴力对解决问题维度的影响系数,其中,当rand≥0.5时,e的值为n1,n1等于正态分布和问题维数中的随机值;当rand<0.5时,e的值为n2,n2等于正态分布中的随机值,rand是介于0到1之间的随机值。
31、优选地,在步骤s4中,具体包括以下子步骤:
32、判断全局最优路径中是否存在障碍物,若不存在障碍物,则移动机器人继续沿着全局最优路径移动;若存在障碍物,则采用障碍物斥力场函数进行移动机器人的避障处理,障碍物斥力场函数如下:
33、
34、其中,urep(q)表示障碍物斥力场函数;η表示斥力尺度因子;d(q,qobs)表示移动机器人和障碍物之间的距离;q表示移动机器人的位置;qobs表示障碍物的位置;d0表示障碍物的斥力场半径。
35、优选地,采用障碍物斥力场函数进行移动机器人的避障处理后,得到局部规划路径,所述局部规划路径的计算公式如下:
36、f(x)=min(d(q,oi)+d(oi,qgoal))
37、其中,d(q,oi)表示移动机器人到光线与障碍物切点的距离;d(qi,qgoal)表示光线与障碍物切点到局部规划路径目标点的距离;f(x)表示局部规划路径;oi表示第i个光线与障碍物切点;q表示移动机器人的位置;qgoal表示局部规划路径的目标点。
38、本技术实施例提供的技术方案可以包括以下有益效果:
39、本方案通过使用人工大猩猩部队优化算法,得到全局最优路径,实现移动机器人的路径规划。人工大猩猩部队优化算法相比于其他算法,例如同蚁群算法、粒子群算法和遗传算法等,具有更强的局部搜索能力、更高的求解能力和更好的稳定性,并且该算法在前期具有很快的收敛性,这使得该算法在优化阶段能够更多地关注有希望的领域。
- 还没有人留言评论。精彩留言会获得点赞!