一种玻璃幕墙位移监测装置及安全预警系统的制作方法
本发明属于幕墙监测领域,具体的说是一种玻璃幕墙位移监测装置及安全预警系统。
背景技术:
1、幕墙是建筑的外墙围护,不承重,像幕布一样挂上去,故又称为″帷幕墙″,是现代大型和高层建筑常用的带有装饰效果的轻质墙体。由面板和支承结构体系组成的,可相对主体结构有一定位移能力或自身有一定变形能力、不承担主体结构所作用的建筑外围护结构或装饰性结构;
2、玻璃幕墙自身就拥有可相对主体结构有一定位移能力,但是位移的距离不可超过预定范围,否则还是有损毁的危险,所以需要在狂风等影响幕墙的恶劣天气下时刻检测幕墙的偏移,防止出现幕墙偏移过多,坍塌后导致人员受伤的问题,因此需要使用测量预警设备进行检测;
3、公开号为cn109883471a的一项中国专利公开了玻璃幕墙结构安全性监测方法,包括如下步骤:传感器设置,在玻璃幕墙结构上设置温度传感器、压力传感器、应力传感器、位移传感器;参数测量,测量室内外温差,玻璃表面压力p,得到玻璃承载力p承,测量龙骨应力值ρ、相对变形值dx;玻璃幕墙结构分区;设置预警值,其中设置预警系数值分别为a、b、c、d;分级分区预警,针对不同的分区设置相同或不同的预警系数值,并在监视器上显示该分区预警颜色。本发明监测数据更为客观和全面、对玻璃幕墙结构的安全性更有保证,且能实时监测预警,自动化程度高。
4、传统的测量方法,通过光学仪器逐一测量每块幕墙到设备的距离,从而得出是否偏移过量,此种方法一般需要人工去进行校对,通过手动调整光学仪器,不仅操作时间较长,且容易产生很大的误差。
5、为此,本发明提供一种玻璃幕墙位移监测装置及安全预警系统。
技术实现思路
1、为了弥补现有技术的不足,解决背景技术中所提出的至少一个技术问题。
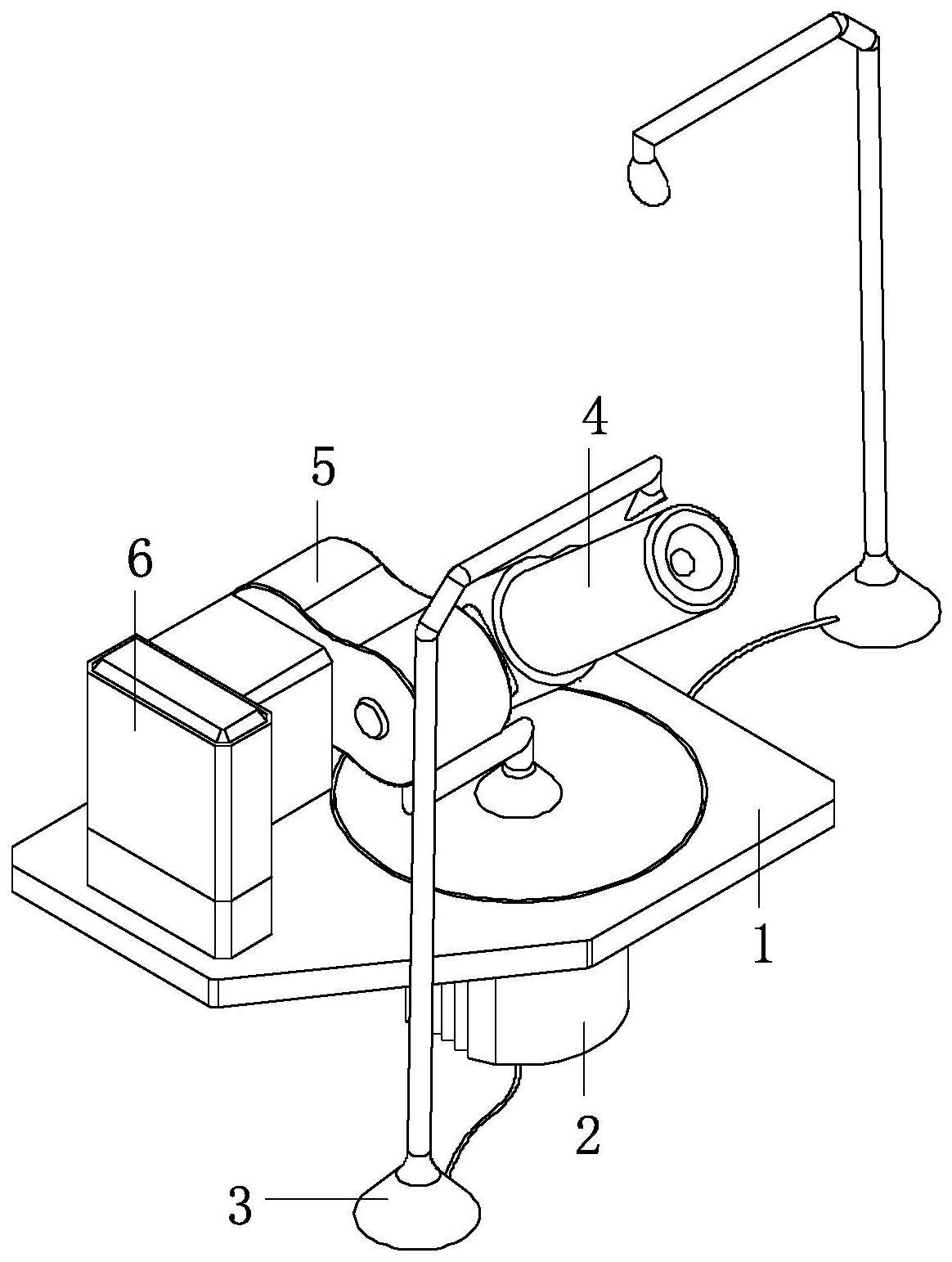
2、本发明解决其技术问题所采用的技术方案是:本发明所述的一种玻璃幕墙位移监测装置,包括支撑板,所述支撑板的底部设置有减速电机,所述减速电机的顶部输出端与支撑板固接,所述支撑板的顶部设置有激光测距模块,所述激光测距模块的一侧设置有保护壳一和保护壳二,所述保护壳二与保护壳一固接,所述保护壳二底部与支撑板固接,所述减速电机位于激光测距模块的正下方,所述保护壳一和保护壳二的内侧设置有转动组件,所述转动组件用于带动激光测距模块在竖直平面上转动;
3、通过转动组件带动激光测距模块在竖直方向上转动,让激光测距模块的测量点自上而下,经过每个玻璃板,将测量出的信息与原本设定的信息相比对,从而得出偏移距离,由于仰角变化,因此转动组件每次转动的角度预设不同,当测量完一列玻璃板后,通过减速电机带动支撑板以激光测距模块为中心旋转,让激光测距模块的测量点移动到另一列玻璃板上,之后转动组件反向转动,让激光测距自下而上再次测量一列的玻璃板,之后重复上述操作就能实现测量完所有幕墙位置的效果,通过此种设置,实现了纯机械监测幕墙玻璃板偏移位置的效果。
4、所述保护壳一的内侧转动连接有从动齿轮和主动齿轮,所述从动齿轮和主动齿轮相互啮合,所述从动齿轮的中部与激光测距模块之间固接有连接杆,所述主动齿轮的外表面开设有两组限位槽,每组中多个限位槽间距逐渐增大,两组限位槽的排列方式也不相同,所述从动齿轮的外表面开设有一组与限位槽对应的收纳槽,所述收纳槽中滑动连接有卡球,所述卡球与收纳槽底部之间固接有弹簧一,所述主动齿轮的一侧设置有用于带动主动齿轮正反转的动力组件,且主动齿轮的一侧设置有用于带动主动齿轮水平移动的平移组件;
5、通过动力组件带动主动齿轮进行旋转,从而带动从动齿轮和激光测距模块进行旋转,由于激光测距模块仰角一直在发生变化,就算是程序控制也容易产生误差,配合限位槽和卡球的设置,从动齿轮旋转到位后,卡球会被弹簧一从收纳槽中弹出,并部分卡入限位槽中,限位槽之间的间距根据仰角的不同而设计,保证激光测距模块最终停下的位置与预设的位置保持相同,提高了测量的精准度;
6、将测量点每次都放在幕墙的最中心位置,若是幕墙以中心为旋转轴发生弯曲偏移,激光测距模块就无法测量出准确的偏转角度,通过实验和论证,将测量点放置在矩形幕墙玻璃对角线三分之一处最佳,可以更加准确的发现偏移情况,同时配合两组限位槽排布不相同的设置,平移组件可以带动主动齿轮水平移动,两组限位槽的位置的不同,确定了激光测距模块停下时,测量点位于幕墙的具体位置,第一组限位槽定的位置为:幕墙玻璃对角线上三分之一处,第二组为:幕墙玻璃对角线下三分之一处,更加有效的提高了测量精度。
7、所述动力组件包括驱动电机,所述主动齿轮靠近保护壳二的一端中部固接有传动杆,所述传动杆的端部连接有蜗轮,所述蜗轮的上方啮合有蜗杆,所述蜗杆与保护壳二内壁转动连接,所述蜗杆的一端与驱动电机输出端固接,通过驱动电机带动蜗杆和蜗轮旋转,进而带动传动杆和主动齿轮旋转,当测量完一列幕墙后,等到减速电机旋转后,驱动电机反向转动,就能让从动齿轮反向转动,让激光测距模块完成自下而上的测量方式,不仅实现了基础的传动效果,同时蜗杆和蜗轮有自锁效果,激光测距模块旋转到位后,驱动电机只需正常断电,蜗轮就无法将动力传递给蜗杆,让激光测距模块可以悬停测量,不会受到外力的干扰导致移动。
8、所述传动杆靠近蜗轮的一端固接有磁性联轴器,所述磁性联轴器包括圆柱状的磁块和套接在磁块的外侧的磁性套,所述磁性套与传动杆固接,所述磁块的一端固接有内杆,所述内杆的外侧花键连接有外杆,所述外杆与蜗轮中部固接,磁性联轴器的设置,防止外界阻挡激光测距模块导致驱动电机电阻过大烧毁的问题,而内杆和外杆的设置,让平移组件在平行移动主动齿轮时,内杆可以在外杆中滑动,不会影响蜗轮和蜗杆的位置,保证了水平移动的稳定性。
9、所述平移组件包括连动板,所述连动板位于传动杆的下方,所述传动杆和磁性联轴器之间设置有顶环,所述连动板的顶端与顶环的外侧固接,所述连动板的外侧底部设置有拉扯组件,所述拉扯组件用于拉扯连动板水平移动,通过拉扯组件的拉扯小,连动板水平移动,同时带动顶环水平移动,顶环中部不接触传动杆,当顶环水平移动时,两端才会顶住磁性联轴器和传动杆,使其水平移动,进而带动主动齿轮移动,实现两组限位槽的位置不断切换的效果。
10、所述拉扯组件包括固接在连动板靠近蜗轮一侧的拉扯块二,所述内杆的外侧固接有触发杆,所述保护壳二的内侧底部滑动连接有滑杆,所述滑杆靠近连动板的一侧固接有拉扯块一,所述拉扯块一和拉扯块二结构相同朝向相反,所述拉扯块一的截面呈三角形设置,所述连动板的外侧设置有用于复位的复位组件,激光测距模块保护壳一之间设置有限位块,使得激光测距模块的仰角限定在一定范围内,无法抬得更高也无法朝向水平以下的位置,当主动齿轮顺指针旋转,让从动齿轮和激光测距模块的仰角自上而下旋转到最低的水平位置后,限位块使得激光测距模块无法转动,进而主动齿轮也无法转动,此时由于磁性联轴器的设置,磁块可以空转,随着内杆的继续旋转,触发杆会旋转一圈后与滑杆外侧撞击,进而带动滑杆向左移动,使得拉扯块一和拉扯块二相互接触挤压,配合两者三角形设置和位置设置,会拉动连动板向驱动电机的方向移动,从而改变限位槽的位置,实现了改变两组不同的限位槽与卡球对接的效果。
11、所述复位组件包括弹簧伸缩杆一,所述弹簧伸缩杆一的两端水平固接在连动板和保护壳二之间,所述保护壳二的内侧底部开设有与滑杆位置对应的滑槽,所述滑槽的中部底端转动连接有弹簧伸缩杆二,所述弹簧伸缩杆二的顶端与滑杆的底部转动连接,所述弹簧伸缩杆二的劲度系数大于弹簧伸缩杆一的劲度系数,当触发杆旋转撞击滑杆时,会使得弹簧伸缩杆二收缩,并在弹簧伸缩杆二越过滑槽中间位置时弹开,通过此种设置,实现了滑杆无法停留在中间,一定会被弹至两端的效果,使得滑杆移动过程中,可以将连动板稳定拉动的效果,当驱动电机反向转动,触发杆从另一个方向撞击滑杆时,随着拉扯块一和拉扯块二远离,在弹簧伸缩杆二的作用下,连动板就会归位,让卡球与第一组限位槽搭配上,通过此种设置,实现了切换测量位置的效果,切换规律为,第一列对角线上三分之一处,第二列对角线下三分之一处,第三列对角线上三分之一处依次循环。
12、所述滑杆的顶端两侧均固接有接触臂,所述接触臂的外侧固接有用于控制减速电机转动的按压开关一,所述支撑板的外部设置有两个切换柱,所述切换柱的顶部设置有按压开关二,所述按压开关而用于控制减速电机的电路通入方向,通过程序控制减速电机的正反转动和开关,同时还需要控制驱动电机的正反转动和开关,编程量较大,且容易出现失误,通过按压开关一和按压开关二的设置,触发杆和滑杆撞击时,先会挤压接触臂,此时的状态是:内杆空转,证明激光测距模块已经到顶或者到底,随着按压开关一被挤压,可以控制减速电机旋转一定角度,让激光测距模块的测量点转动到下一列玻璃幕墙上,而切换柱的设置,当激光测距模块将所用的幕墙测量完毕后,此时激光测距模块处于最边缘处,并处于仰视状态,此时会撞击切换柱的按压开关二,使得减速电机的通电方向改变,使得减速电机下次旋转时,反向旋转,进而可以重新测量一遍幕墙;此种设置,大大减少了程序设定的难度,大部分用机械开关代替。
13、所述限位槽的底部内壁上固接有触发按钮,所述触发按钮用于控制驱动电机的通电状态,滑槽的内侧中部固接有切换按钮,所述切换按钮用于在控制驱动电机的电路通入方向,切换按钮与弹簧伸缩杆二呈垂直设置,每当卡球弹出到限位槽中后,卡球挤出按压触犯按钮,从而让驱动电机断电一段时间,以供激光测距模块有足够的时间测量,一段时间后,驱动电机恢复供电,让激光测距模块仰角改变,触发另一个触发按钮,当滑杆滑动,使得弹簧伸缩杆二越过中间的切换按钮,切换按钮被按压后,会改变驱动电机的电路通入方向,从而让驱动电机反向旋转,让激光测距模块可以自下而上旋转,通过四个机械开关的配合,让整个设备的驱动过程,只需要简单的程序,就能完成复杂的重复运动和电流变化功能。
14、一种玻璃幕墙位移监测安全预警系统,该系统包括激光测距单元、转向单元、发送单元和预警单元;
15、激光测距单元:所述激光测距单元包括激光测距模块,主要通过方向测量激光,测量激光测距模块与测量点之间的距离,并将距离信息通过发送单元向外发送;
16、转向单元:所述转向单元用于带动激光测距单元进行转向,让激光测距单向可以测量到幕墙的所有玻璃板;
17、发送单元:所述发送单元用于接收激光测距模块发送的信号,并将信息发送给预警单元;
18、预警单元:所述预警单元用于接收发送单元发送的信息,并对比信息与预留数值,当超过预留数值时,预警单元向外界发送预警信号,用于提示人们远离幕墙。
19、本发明的有益效果如下:
20、1.本发明所述的一种玻璃幕墙位移监测装置及安全预警系统,通过减速电机和转动组件的设置,将减速电机的底部固定在幕墙一侧的位置永久保持,将激光测距模块的输出端对准幕墙四个边角的幕墙玻璃板中部,通过转动组件带动激光测距模块在竖直方向上转动,让激光测距模块的测量点自上而下,经过每个玻璃板,将测量出的信息与原本设定的信息相比对,从而得出偏移距离,由于仰角变化,因此转动组件每次转动的角度预设不同,当测量完一列玻璃板后,通过减速电机带动支撑板以激光测距模块为中心旋转,让激光测距模块的测量点移动到另一列玻璃板上,之后转动组件反向转动,让激光测距自下而上再次测量一列的玻璃板,之后重复上述操作就能实现测量完所有幕墙位置的效果,通过此种设置,实现了纯机械监测幕墙玻璃板偏移位置的效果。
21、2.本发明所述的一种玻璃幕墙位移监测装置及安全预警系统,通过动力组件带动主动齿轮进行旋转,从而带动从动齿轮和激光测距模块进行旋转,由于激光测距模块仰角一直在发生变化,就算是程序控制也容易产生误差,配合限位槽和卡球的设置,从动齿轮旋转到位后,卡球会被弹簧一从收纳槽中弹出,并部分卡入限位槽中,限位槽之间的间距根据仰角的不同而设计,保证激光测距模块最终停下的位置与预设的位置保持相同,提高了测量的精准度。
- 还没有人留言评论。精彩留言会获得点赞!