分布监测站下基于泰勒补偿的非圆信号直接定位跟踪方法
本发明涉及一种分布式监测站下基于泰勒补偿的非圆信号直接定位跟踪方法,属于被动雷达直接定位跟踪的领域。
背景技术:
1、随着5g高速通信,物联网等各种新兴产业的蓬勃发展,电磁环境也变得越来越复杂,信源定位技术在通信、导航以及无线电监控等领域都发挥着重要的作用,由于单个信源所能获得的信源信息量较少,并且波达方向估计误差大,从而导致定位精度较低。多阵列的定位与之相比可以获得更为丰富的信源参数信息,可以大大提高定位的性能。与此同时,非圆信号相比于传统圆信号具有更大的阵列孔径,且伪协方差不为零,因此非圆信号具有更多的信息,并可以实现更多的目标跟踪。在传统的跟踪算法中,往往是通过在一小段时间间隔内取一定的快拍,并假设信源在这一小部分快拍中位置并未发生变化,通过重复上述步骤在每个时刻对信号位置进行测量,最终获得信源的运动估计。常见的算法如两步定位算法与直接定位算法等等。两步算法是跟踪信源位置的常用方法,它由两个独立的步骤组成。首先,我们需要测量目标源的位置参数,例如到达方向(doa),多普勒频移以及到达时间差(tdoa)。然后这些参数可以用于计算源位置。然而两步定位算法是次优的,这是由于两步之间相互独立,存在误差的进一步转移。与两步方法相比,直接方法(dpd)具有显著的优势,因为它可以通过构建一个成本函数来直接跟踪源。由于避免了几何关系的构建,直接定位方法更适用于低信噪比的情况,并产生更准确的结果。但是上述所提的算法只是单纯的在每一个时刻重复位置估计,各个时刻之间的估计是相互独立的。因此,使用先验信息实现对目标位置的跟踪可以进一步提高跟踪的精度。
2、其次,圆信号和非圆信号分别指信号的椭圆协方差为零和非零。非圆信号通常用于数字调制方案,如二进制相移键控和幅移键控。当已知存在严格的nc源时,先前的工作表明,使用观测信号的非圆结构可以提高传统参数估计算法的性能,并解决多达两倍的源。因此,对非圆信号的位置跟踪具有很好的研究意义与应用前途
技术实现思路
1、发明目的:针对上述现有技术,提出一种分布监测站下基于泰勒补偿的非圆信号直接定位跟踪方法;
2、技术方案:
3、分布监测站下基于泰勒补偿的非圆信号直接定位跟踪方法,包括以下步骤:
4、步骤1):获取监测站的接收信号,其中所述接收信号包含非圆信号与噪声信号;
5、步骤2):对接收信号进行扩展,计算协方差矩阵并对协方差矩阵进行特征分解;
6、步骤3):基于泰勒展开的非圆信号直接定位跟踪,得到非圆信号的位置;
7、步骤4):当多个非圆信号的轨迹交叉时,应用最小二乘法预测非圆信号的位置。
8、优选的,步骤1)中,
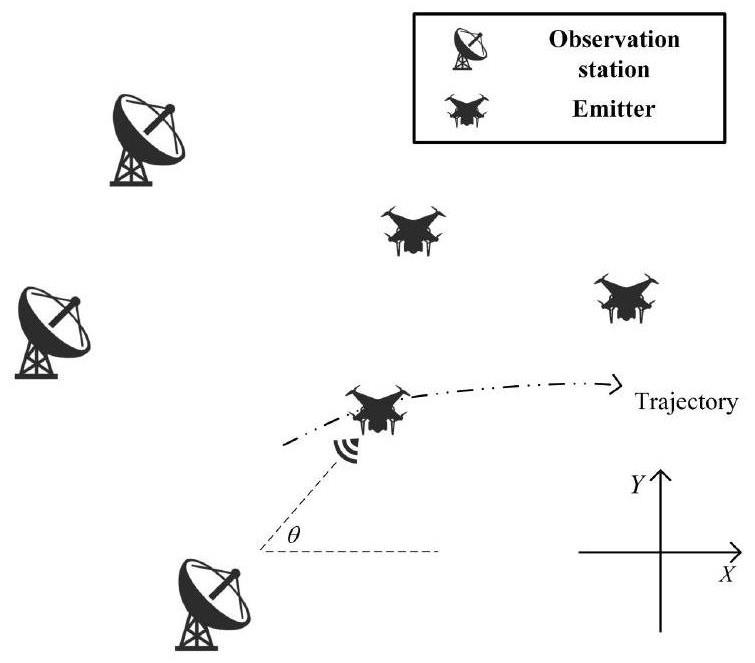
9、假设空间中存在k个远场窄带的非圆信号互不相干的冲击到l个监测站上,其中每个监测站配置一个均匀线阵,假设非圆信号在t时刻的位置为pk,t=(xk,t,yk,t)t(k=1,2,…,k),第l观测站位于ul=(xl,yl)t(l=1,2,…,l),并假设所有的监测站都是时间同步的;
10、则有第l个监测站的接收信号表示为:
11、xl(t)=al(t)sl(t)+nl(t) (1)
12、al(t)为导向矩阵,表示为:
13、al(t)=[al,1(t),al,2(t),…,al,k(t)] (2)
14、导向矢量al,k(t)表示为:
15、
16、其中表示接受信号中的角度信息,λ表示接收信号的信号波长,m为监测站中均匀线阵所配置的阵元个数,d表示阵元间距;
17、信号矩阵sl(t)为:
18、sl(t)=[sl,1(t),sl,2(t),…,sl,k(t)]t (4)
19、第l个监测站在t时刻接收到的第k个非圆信号sl,k(t)为:
20、
21、表示非圆信号的信号强度,表示第k个非圆信号的非圆相位;将公式(4)改写为:
22、
23、其中矩阵ω为:
24、
25、
26、是一个实值矩阵;
27、将第l个监测站的接收信号重新表示为:
28、
29、nl(t)是零均值高斯白噪声。
30、优选的,步步骤2)中:
31、将第l个监测站的接收信号扩展为:
32、
33、扩展导向矩阵bl(t)为:
34、
35、扩展导向矢量bl,k(t)为:
36、
37、高斯噪声矩阵为
38、接收信号的协方差矩阵为:
39、
40、对协方差矩阵进行特征值分解,表示为:
41、rl(t)=[ul,s(t)ul,n(t)]λl(t)[ul,s(t)ul,n(t)]h (14)
42、其中ul,s(t)和ul,n(t)分别是第l个观测站在t时刻接收信号的信号子空间和噪声子空间;λl(t)是由特征值组成的对角阵;
43、根据子空间信息融合算法,利用扩展导向矢量与噪声子空间的正交性,非圆信号满足以下函数:
44、
45、其中为函数中的自变量,分别表示非圆信号的位置与非圆信号的非圆相位,为以为自变量的扩展导向矢量;对式(15)进行三维谱峰搜索,当取得局部极小值时,获得非圆信号位置的估计值
46、优选的,步步骤3)中:
47、第k个非圆信号在t+1时刻的位置与t时刻的位置满足关系:
48、
49、其中ξx,k,t+1和ξy,k,t+1分别是x轴坐标与y轴坐标的对应偏差;
50、同时,非圆相位的计算存在误差,因此存在:
51、
52、表示相邻时刻非圆相位的偏差;
53、对t+1时刻的扩展导向矢量bl,k(t+1)进行一阶泰勒展开得到:
54、
55、由于信号的噪声子空间与扩展导向矢量之间存在正交性,因此:
56、
57、当观测区域内存在多个非圆信号时,正交性表示为:
58、
59、定义三个偏差对角阵:
60、
61、
62、
63、根据公式(12),(18),(20)得到公式(24):
64、
65、其中,o(2m-k)×k表示2m-k×k维的零矩阵;偏导矩阵定义为:
66、
67、则偏导矩阵ξx(t+1),ξy(t+1),计算为:
68、
69、其中
70、
71、
72、因此计算出偏移量;
73、在t+1时刻,非圆信号位置的估计和非圆相位的估计相应地得到,即:
74、
75、然后对结果进行迭代,实现对观测区域内多个非圆信号的位置跟踪。
76、优选的,步步骤4)中,当多个非圆信号的运动轨迹在t+e时刻交叉时,假设在此时刻前m时刻对非圆信号的位置估计值分别为应用最小二乘法对进行拟合,并同时对下一时刻非圆信号的位置进行预测。
77、优选的,设定阈值,当非圆信号的位置相距大于阈值时,使用步骤1)-3)对非圆信号的位置进行跟踪,当非圆信号的位置相距小于阈值时,使用步骤1)-4)最小二乘法的预测结果对非圆信号的位置进行跟踪。
78、有益效果:
79、本发明通过计算补偿的形式对信源跟踪进行进一步优化,为位置跟踪提供了一个新的思路。本发明采用以上技术方案与现有技术相比,具有以下技术效果:
80、①通过对导向矢量的一阶展开,利用了前一时刻的先验信息,将跟踪问题转化为补偿问题,极大的降低了算法的复杂度。在偏差计算中,充分利用导向矢量与接收信号的噪声子空间之间的正交性,计算获得偏差实现跟踪
81、②具有较低的算法复杂度以及较好的监测精度,在较差的环境下仍可获得较好的跟踪定位结果;
82、③避免了多个信源存在情况下的数据关联问题,并考虑信源轨迹交叉时存在的相互影响问题,通过最小二乘法解决该时刻存在的位置模糊情况。
- 还没有人留言评论。精彩留言会获得点赞!