群组导航定位中的分组信息的确定方法、装置及设备与流程
本技术涉及群组导航定位领域,尤其涉及一种群组导航定位中的分组信息的确定方法、装置及设备。
背景技术:
1、目前,在对群组中的各个定位设备进行导航定位时,通常需要群组中的定位设备之间信息交互,并基于信息交互得到的信息确定自身所对应的地图信息。其中,地图信息中可以包括有各定位设备自身的运行轨迹。
2、如何确定进行信息交互的定位设备组,以确保信息交互的成功性是一种亟需解决的问题。
技术实现思路
1、本技术提供群组导航定位中的分组信息的确定方法、装置及设备方法、装置及设备,用以提高分组中的设备间信息交互的成功性。
2、第一方面,本技术提供一种群组导航定位中的分组信息的确定方法,应用于导航系统中的定位设备,所述导航系统包括中央控制器和多个定位设备,所述方法包括:
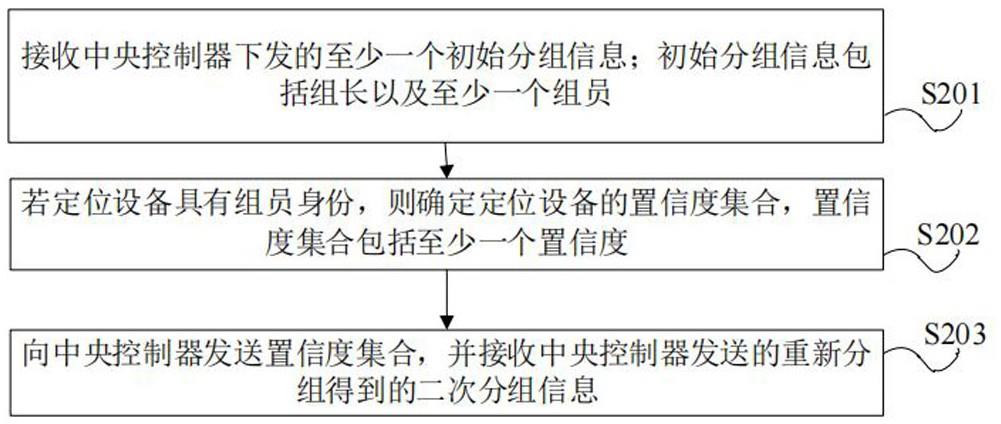
3、接收所述中央控制器下发的至少一个初始分组信息;所述初始分组信息包括组长以及至少一个组员;所述组员为具有组员身份的定位设备;所述组长为需要与所述初始分组中的组员进行两两测位的定位设备;
4、若所述定位设备具有组员身份,则确定所述定位设备的置信度集合,所述置信度集合包括至少一个置信度,所述置信度表征所述定位设备和初始分组信息中的组长进行两两测位时的测位成功率;
5、向所述中央控制器发送所述置信度集合,并接收所述中央控制器发送的重新分组得到的二次分组信息;所述二次分组信息为所述中央控制器基于所述置信度集合确定的;所述二次分组信息用于指示需要两两信息交互的定位设备。
6、在一种可能的实现方式中,若所述定位设备具有组员身份,则确定所述定位设备的置信度集合,包括:
7、重复以下步骤,直至达到第一停止条件:若确定所述定位设备具有组员身份,且可以接收第n个第一分组信息中的组长发送的第一点名信号,则根据所述第一点名信号,确定所述定位设备与所述组长二者之间的置信度;令n的取值加1;其中,所述第一点名信号用于确定所述组长与接收到所述第一点名信号之间是否可以建立通信;n为正整数;所述第一分组信息为包括所述定位设备的初始分组信息;所述第一停止条件为所述第一分组信息遍历结束;
8、若确定所述定位设备所确定的置信度中存在候选置信度,则将所述候选置信度作为所述定位设备的置信度集合中所包含的元素,所述候选置信度为取值大于等于第一阈值的置信度。
9、在一种可能的实现方式中,所述方法还包括:
10、重复以下步骤,直至达到第二停止条件:若确定所述定位设备与各第一分组信息中的组长之间的置信度均小于第一阈值,且可以接收第m个第二分组信息中的组长发送的第二点名信号,则根据所述第二点名信号,确定所述定位设备与所述组长二者之间的置信度;令m的取值加1;所述第二分组信息为不包括所述定位设备的初始分组信息;所述第二停止条件为所述第二分组信息遍历结束;其中,所述第二点名信号用于指示所述组长与接收到所述第二点名信号的组员是否可以建立通信;m为正整数;
11、根据所述定位设备所确定的置信度,确定所述定位设备的置信度集合。
12、在一种可能的实现方式中,所述第二分组信息中的组长发送的第二点名信号的数量大于所述第二分组信息中所包含的组员的数量。
13、在一种可能的实现方式中,所述方法还包括:
14、若确定所述定位设备具有组员身份,且预设时间间隔内未接收到第n个第一分组信息中的组长发送的第一点名信号,则令n的取值加1。
15、在一种可能的实现方式中,所述二次分组信息包括目标组长以及至少一个组员;所述二次分组信息中组员所对应的目标组长为所述中央控制器确定所述组员上报的置信度集合中所包含的预设取值大于等于第二阈值时,根据所述预设取值所确定的;所述预设取值为所述置信度集合中取值最大的置信度;所述二次分组信息中的目标组长用于和所述二次分组信息中的组员进行两两测位。
16、在一种可能的实现方式中,所述二次分组信息中还包括通信参数;其中,所述通信参数为所述中央控制器根据目标置信度所确定的;所述目标置信度为所述组员和所述组员对应的组长之间的置信度;所述通信参数用于指示二次分组信息中的所述组员和所述组员对应的目标组长间两两测位时各自所配置的收发机的参数;所述通信参数所包含的前导码长度和目标置信度呈负相关;所述通信参数所包含的码速率和目标置信度呈正相关。
17、在一种可能的实现方式中,若所述目标置信度大于等于第二阈值,且小于第一阈值时,则所述目标置信度对应的组员和组长的各自的通信参数中均包括第一前导码长度和第一码速率;所述第二阈值小于所述第一阈值;
18、若所述目标置信度大于等于所述第一阈值,则所述目标置信度对应的组员和组长的各自的通信参数中均包括第二前导码长度和第二码速率,其中,所述第二前导码长度小于所述第一前导码长度;所述第二码速率小于所述第一码速率。
19、在一种可能的实现方式中,所述方法还包括:
20、接收所述中央控制器发送的终止信号,其中,所述终止信号用于指示所述定位设备本次无需和任一初始分组信息中的组长进行两两测位;且,所述终止信号为所述中央控制器确定所述定位设备上报的置信度集合中所包含的预设取值小于第二阈值时所发送的;所述预设取值为所述置信度集合中取值最大的置信度的取值。
21、在一种可能的实现方式中,所述二次分组信息包括目标组长以及至少一个组员;所述二次分组信息中组员所对应的目标组长为所述中央控制器根据所述组员上报的置信度集合中所包含的预设取值所确定的;所述预设取值为所述置信度集合中取值最大的置信度;所述二次分组信息中的目标组长用于和所述二次分组信息中的组员进行两两测位;且,所述二次分组信息中的组员具有编号信息;所述编号信息用于指示所述组员与所述组员对应的目标组长进行两两测位的顺序;
22、所述方法还包括:
23、根据所述编号信息、测位时长以及起始时间,确定所述定位设备和所述定位设备所处的二次分组信息中的目标组长进行两两测位的测位时间;所述测位时长为所述目标组长和所述定位设备间两两测位的时间;所述起始时间为所述目标组长与所述二次分组信息中的首个组员进行两两测位的时间;
24、在所述测位时间,确定和所述目标组长二者之间的相对位置信息。
25、第二方面,本技术提供一种群组导航定位中的分组信息的确定方法,应用于导航系统中的中央控制器,所述导航系统还包括多个定位设备,所述方法包括:
26、向定位设备下发至少一个初始分组信息;所述初始分组信息包括组长以及至少一个组员;所述组长为需要与所述初始分组中的组员进行两两测位的定位设备;所述组员为具有组员身份的定位设备;
27、接收具有组员身份的定位设备上报的置信度集合,所述置信度集合包括至少一个置信度,所述置信度表征所述定位设备和所述初始分组信息中的组长进行两两测位时的测位成功率;
28、根据所述置信度集合,确定并向所述定位设备的二次分组信息;所述二次分组信息用于指示所述定位设备基于所述二次分组信息中所指示的组长构建地图信息。
29、在一种可能的实现方式中,根据所述置信度集合,确定并向所述定位设备的二次分组信息,包括:
30、确定所述定位设备上报的置信度集合中的预设取值,所述预设取值为所述置信度集合中取值最大的置信度;
31、若确定所述预设取值大于等于第二阈值,则将所述预设取值所对应的初始分组信息中的组长,确定为所述定位设备在二次分组信息中所对应的目标组长;
32、向所述定位设备下发二次分组信息,所述二次分组信息用于指示所述定位设备所对应的目标组长。
33、在一种可能的实现方式中,所述二次分组信息中还包括通信参数;所述方法还包括:
34、根据目标置信度,确定所述二次分组信息中的通信参数,其中,所述通信参数用于指示所述二次分组信息中的组员和所述组员对应的目标组长间两两测位时各自所配置的收发机的参数;所述通信参数所包含的前导码长度和目标置信度呈负相关;所述通信参数所包含的码速率和目标置信度呈正相关。
35、在一种可能的实现方式中,根据目标置信度,确定所述二次分组信息中的通信参数,包括:
36、若确定所述目标置信度大于等于第二阈值,且小于第一阈值时,则确定所述通信参数中包括第一前导码长度和第一码速率;
37、若确定所述目标置信度大于等于所述第一阈值,则确定所述通信参数中包括第二前导码长度和第二码速率,且所述第二前导码长度小于所述第一前导码长度;所述第二码速率小于所述第一码速率。
38、在一种可能的实现方式中,所述方法还包括:
39、若确定所述定位设备上报的置信度集合中所包含的预设取值小于第二阈值,则向所述定位设备下发终止信号,其中,所述预设取值为所述置信度集合中取值最大的置信度的取值;所述终止信号用于所述终止信号用于指示所述定位设备本次无需和任一初始分组信息中的组长进行两两测位。
40、第三方面,本技术提供一种群组导航定位中的分组信息的确定装置,应用于导航系统中的定位设备,所述导航系统包括中央控制器和多个定位设备,所述装置包括:
41、第一接收单元,用于接收所述中央控制器下发的至少一个初始分组信息;所述初始分组信息包括组长以及至少一个组员;所述组员为具有组员身份的定位设备;所述组长为需要与所述初始分组中的组员进行两两测位的定位设备;
42、第一确定单元,用于若所述定位设备具有组员身份,则确定所述定位设备的置信度集合,所述置信度集合包括至少一个置信度,所述置信度表征所述定位设备和初始分组信息中的组长进行两两测位时的测位成功率;
43、第一发送单元,用于向所述中央控制器发送所述置信度集合;
44、第二接收单元,用于接收所述中央控制器发送的重新分组得到的二次分组信息;所述二次分组信息为所述中央控制器基于所述置信度集合确定的;所述二次分组信息用于指示需要两两信息交互的定位设备。
45、在一种可能的实现方式中,第一确定单元,包括:
46、重复以下第一确定模块和第一求和模块,直至达到第一停止条件:
47、第一确定模块,用于若确定所述定位设备具有组员身份,且可以接收第n个第一分组信息中的组长发送的第一点名信号,则根据所述第一点名信号,确定所述定位设备与所述组长二者之间的置信度;
48、第一求和模块,用于令n的取值加1;其中,所述第一点名信号用于确定所述组长与接收到所述第一点名信号之间是否可以建立通信;n为正整数;所述第一分组信息为包括所述定位设备的初始分组信息;所述第一停止条件为所述第一分组信息遍历结束;
49、第二确定模块,用于若确定所述定位设备所确定的置信度中存在候选置信度,则将所述候选置信度作为所述定位设备的置信度集合中所包含的元素,所述候选置信度为取值大于等于第一阈值的置信度。
50、在一种可能的实现方式中,所述第一确定单元还包括:
51、重复以下第三确定模块和第二求和模块,直至达到第二停止条件:
52、第三确定模块,用于若确定所述定位设备与各第一分组信息中的组长之间的置信度均小于第一阈值,且可以接收第m个第二分组信息中的组长发送的第二点名信号则根据所述第二点名信号,确定所述定位设备与所述组长二者之间的置信度,其中,所述第二点名信号用于指示所述组长与接收到所述第二点名信号的组员是否可以建立通信;m为正整数;
53、第二求和模块,用于令m的取值加1;所述第二分组信息为不包括所述定位设备的初始分组信息;所述第二停止条件为所述第二分组信息遍历结束;
54、第四确定模块,用于根据所述定位设备所确定的置信度,确定所述定位设备的置信度集合。
55、在一种可能的实现方式中,所述第二分组信息中的组长发送的第二点名信号的数量大于所述第二分组信息中所包含的组员的数量。
56、在一种可能的实现方式中,所述第一确定单元,还包括:
57、第三求和模块,用于若确定所述定位设备具有组员身份,且预设时间间隔内未接收到第n个第一分组信息中的组长发送的第一点名信号,则令n的取值加1。
58、在一种可能的实现方式中,所述二次分组信息包括目标组长以及至少一个组员;所述二次分组信息中组员所对应的目标组长为所述中央控制器确定所述组员上报的置信度集合中所包含的预设取值大于等于第二阈值时,根据所述预设取值所确定的;所述预设取值为所述置信度集合中取值最大的置信度;所述二次分组信息中的目标组长用于和所述二次分组信息中的组员进行两两测位。
59、在一种可能的实现方式中,所述二次分组信息中还包括通信参数;其中,所述通信参数为所述中央控制器根据目标置信度所确定的;所述目标置信度为所述组员和所述组员对应的组长之间的置信度;所述通信参数用于指示二次分组信息中的所述组员和所述组员对应的目标组长间两两测位时各自所配置的收发机的参数;所述通信参数所包含的前导码长度和目标置信度呈负相关;所述通信参数所包含的码速率和目标置信度呈正相关。
60、在一种可能的实现方式中,若所述目标置信度大于等于第二阈值,且小于第一阈值时,则所述目标置信度对应的组员和组长的各自的通信参数中均包括第一前导码长度和第一码速率;所述第二阈值小于所述第一阈值;
61、若所述目标置信度大于等于所述第一阈值,则所述目标置信度对应的组员和组长的各自的通信参数中均包括第二前导码长度和第二码速率,其中,所述第二前导码长度小于所述第一前导码长度;所述第二码速率小于所述第一码速率。
62、在一种可能的实现方式中,所述装置还包括:
63、第三接收单元,用于接收所述中央控制器发送的终止信号,其中,所述终止信号用于指示所述定位设备本次无需和任一初始分组信息中的组长进行两两测位;且,所述终止信号为所述中央控制器确定所述定位设备上报的置信度集合中所包含的预设取值小于第二阈值时所发送的;所述预设取值为所述置信度集合中取值最大的置信度的取值。
64、在一种可能的实现方式中,所述二次分组信息包括目标组长以及至少一个组员;所述二次分组信息中组员所对应的目标组长为所述中央控制器根据所述组员上报的置信度集合中所包含的预设取值所确定的;所述预设取值为所述置信度集合中取值最大的置信度;所述二次分组信息中的目标组长用于和所述二次分组信息中的组员进行两两测位;且,所述二次分组信息中的组员具有编号信息;所述编号信息用于指示所述组员与所述组员对应的目标组长进行两两测位的顺序;
65、所述装置还包括:
66、第二确定单元,用于根据所述编号信息、测位时长以及起始时间,确定所述定位设备和所述定位设备所处的二次分组信息中的目标组长进行两两测位的测位时间;所述测位时长为所述目标组长和所述定位设备间两两测位的时间;所述起始时间为所述目标组长与所述二次分组信息中的首个组员进行两两测位的时间;
67、第三确定单元,用于在所述测位时间,确定和所述目标组长二者之间的相对位置信息。
68、第四方面,本技术提供一种群组导航定位中的分组信息的确定装置,应用于导航系统中的中央控制器,所述导航系统还包括多个定位设备,所述装置包括:
69、第二发送单元,用于向定位设备下发至少一个初始分组信息;所述初始分组信息包括组长以及至少一个组员;所述组长为需要与所述初始分组中的组员进行两两测位的定位设备;所述组员为具有组员身份的定位设备;
70、第四接收单元,用于接收具有组员身份的定位设备上报的置信度集合,所述置信度集合包括至少一个置信度,所述置信度表征所述定位设备和所述初始分组信息中的组长进行两两测位时的测位成功率;
71、第四确定单元,用于根据所述置信度集合,确定所述定位设备的二次分组信息;所述二次分组信息用于指示所述定位设备基于所述二次分组信息中所指示的组长构建地图信息;
72、第三发送单元,用于向所述定位设备下发所述二次分组信息。
73、在一种可能的实现方式中,第四确定单元,包括:
74、第五确定模块,用于确定所述定位设备上报的置信度集合中的预设取值,所述预设取值为所述置信度集合中取值最大的置信度;
75、第六确定模块,用于若确定所述预设取值大于等于第二阈值,则将所述预设取值所对应的初始分组信息中的组长,确定为所述定位设备在二次分组信息中所对应的目标组长。
76、在一种可能的实现方式中,所述二次分组信息中还包括通信参数;所述装置还包括:
77、第五确定单元,用于根据目标置信度,确定所述二次分组信息中的通信参数,其中,所述通信参数用于指示所述二次分组信息中的组员和所述组员对应的目标组长间两两测位时各自所配置的收发机的参数;所述通信参数所包含的前导码长度和目标置信度呈负相关;所述通信参数所包含的码速率和目标置信度呈正相关。
78、在一种可能的实现方式中,第五确定单元,包括:
79、第七确定模块,用于若确定所述目标置信度大于等于第二阈值,且小于第一阈值时,则确定所述通信参数中包括第一前导码长度和第一码速率;
80、第八确定模块,用于若确定所述目标置信度大于等于所述第一阈值,则确定所述通信参数中包括第二前导码长度和第二码速率,且所述第二前导码长度小于所述第一前导码长度;所述第二码速率小于所述第一码速率。
81、在一种可能的实现方式中,所述装置还包括:
82、第四发送单元,用于若确定所述定位设备上报的置信度集合中所包含的预设取值小于第二阈值,则向所述定位设备下发终止信号,其中,所述预设取值为所述置信度集合中取值最大的置信度的取值;所述终止信号用于所述终止信号用于指示所述定位设备本次无需和任一初始分组信息中的组长进行两两测位。
83、第五方面,本技术提供一种中央控制器,所述中央控制器用于实现第二方面中任一项所述的方法。
84、第六方面,本技术提供一种电子设备,包括:存储器,处理器;
85、存储器;用于存储所述处理器可执行指令的存储器;
86、其中,所述处理器,用于根据所述可执行指令执行如第一方面任一项所述的方法。
87、第七方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如第一方面任一项所述的方法;或者,所述计算机执行指令被处理器执行时用于实现如第二方面任一项所述的方法。
88、第八方面,本技术提供一种计算机程序产品,所述计算机程序产品包括计算机程序,该计算机程序被处理器执行时实现第一方面中任一项所述的方法;或者,该计算机程序被处理器执行时实现第二方面中任一项所述的方法。
89、第九方面,本技术提供一种机器人,包括第三方面所述的群组导航定位中的分组信息的确定装置。
90、本技术提供的群组导航定位中的分组信息的确定方法、装置及设备,为了避免中央控制器下发的初始分组信息不准确所导致的定位设备间无法进行可靠的通信,例如,无法两两测位的问题,当定位设备接收到初始分组信息,并确定自身的身份为组员时,此时,还会确定其与初始分组信息中的组长进行测位时的测位成功率,即,上述置信度,并将确定出的置信度上报至中央控制器,以便中央控制器在初始分组信息的基础上,结合定位设备上报的置信度集合重新确定各组员所对应的目标组长,即,该组员是否需要更改分组,进而得到二次分组信息。进而,通过上述方法,可以提高定位和设备间进行两两测位的成功率。
- 还没有人留言评论。精彩留言会获得点赞!