基于分割算法的果园路径导航方法及系统
本发明属于路径导航,具体是基于分割算法的果园路径导航方法及系统。
背景技术:
1、果园,是指种植果树的园地,也叫果木园,在果木园内,若干个果园之间路径均为互通状,在果园内行驶时,便可通过若干个行驶路径到达指定目的地;
2、专利公开号为cn113280820a的发明公开了一种基于神经网络的果园视觉导航路径提取方法与系统,包括:s1、利用微软kinect2深度相机进行数据采集,拍摄大量果园路况图像;s2、利用程序对数据进行预处理;s3、基于tensorflow框架搭建segnet深度学习神经网络模型,该模型包括编码部分和解码部分,且编码与解码之间呈一种对称关系;s4、训练已经搭建成功的segnet深度学习神经网络模型,训练前设置模型参数;s5、基于训练成功的模型识别果园路况信息,生成路况掩码区并保存对应特征,从保存的路况掩码区中提取左右侧边缘信息点,利用左右侧边缘信息点的特征进行导航路径拟合,本发明利用segnet深度学习神经网络模型,通过深度学习的方式提高了果园导航路径识别的准确率,为视觉导航任务提供有效参考。
3、果园车辆在进行路径导航过程中,根据定位点以及目标点,对车辆的行驶路径进行确认,并将所确认的行驶路径传输至展示端内进行展示,但此种行驶路径确认方式,在具体操作过程中,仍存在以下不足需进行改进:
4、在路径确认过程中,未分析对应路径的堵车情况,会导致本车辆总体行驶时长过长,影响驾乘人员的驾驶体验。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一;为此,本发明提出了基于分割算法的果园路径导航方法及系统,用于解决在路径确认过程中,未分析对应路径的堵车情况,会导致本车辆总体行驶时长过长,影响驾乘人员的驾驶体验的技术问题。
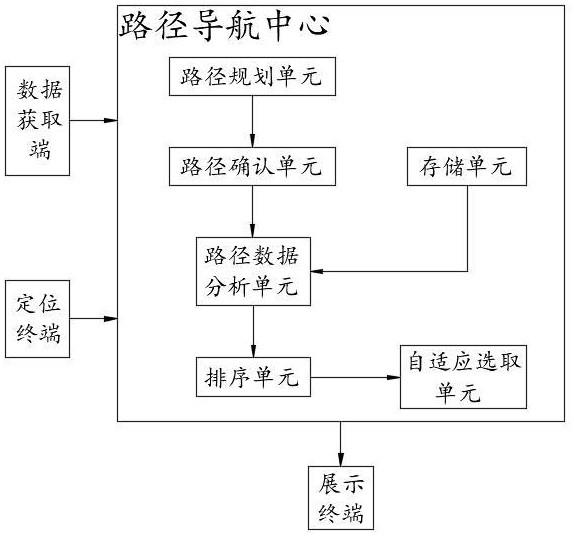
2、为实现上述目的,根据本发明的第一方面的实施例提出基于分割算法的果园路径导航系统,包括数据获取端、定位终端、路径导航中心以及展示终端;
3、所述路径导航中心包括路径规划单元、路径确认单元、路径数据分析单元、存储单元、排序单元以及自适应选取单元;
4、所述数据获取端,用于对指定车辆的导航信息以及果园园区的路径信息进行获取,并将所获取的导航信息以及路径信息传输至路径导航中心内;
5、所述定位终端,设置于指定车辆内,用于对指定车辆的内部定位信息进行获取,并将所获取的定位信息传输至路径导航中心内;
6、所述路径导航中心内部的路径规划单元,对所获取的导航信息进行获取,根据所获取的导航信息以及路径信息,进行路径规划,并将符合条件的行驶路径传输至路径确认单元内,具体方式为:
7、从导航信息内,确认指定车辆的目标到达点,再从导航信息内,获取指定车辆的初始位置,从原先设定的果园模型内,获取初始位置与目标到达点之间的距离参数,并将其标记为jli,其中i代表不同的指定车辆;
8、根据初始位置以及目标到达点,从果园模型的路径信息内,依次确认若干个行驶路径,并对若干个行驶路径的行驶距离进行确认,将所确认的若干个行驶距离标记为xsi-k,其中k代表不同的行驶路径;
9、将符合jli×3≥xsi-k的行驶路径进行确认,并将所确认的行驶路径传输至路径确认单元内;
10、所述路径确认单元,根据所确认的行驶路径,依次获取对应路径的路径编号,并根据不同的行驶路径,生成路径编号数据包,并将所生成的若干个路径编号数据包传输至路径数据分析单元内;
11、所述路径数据分析单元,根据所生成的路径编号数据包,并从存储单元内提取对应的周期数据,对若干个行驶路径的的行径时长进行分析,并将分析所得的行径时长参数传输至排序单元内,具体方式为:
12、从路径编号数据包内确定行驶路径,从存储单元内,获取此行驶路径内前一个周期t内所经过的或正在经过的行驶车辆编号;
13、根据行驶车辆编号,获取存储单元内所存储的定位终端所传送的定位信息,根据定位信息,判定行驶车辆是否位于行驶路径内,若位于对应行驶路径内,将行驶车辆标记为阻碍车辆,反之,则不进行任何处理;
14、获取阻碍车辆位于本周期t内的行驶速度,将行驶速度与vs进行比对,其中vs为预设值,当行驶速度<vs时,获取持续时长,并将持续时长标记为csi,反之,不进行任何处理;
15、获取此周期t内,本行驶路径出现阻碍车辆的次数,并将次数的具体数值标记为sz,再获取本行驶路径阻碍车辆所出现持续时长csi的最大值,并将其标记为csimax;
16、采用pxi=sz×c1+csimax×c2得到不同行驶路径的排序参数pxi,其中c1以及c2均为预设的固定系数因子,将不同行驶路径的排序参数pxi传输至排序单元内;
17、所述排序单元,对路径数据分析单元所传输的排序参数pxi进行接收,并根据所接收到的排序参数,按照数值从小至大的方式,进行优先级排序,并生成行驶路径优先级排序表,并将所生成的行驶路径优先级排序表传输至自适应选取单元内;
18、所述自适应选取单元,对所生成的行驶路径优先级排序表进行接收,并根据接收到的行驶路径优先级排序表,对指定车辆的最佳行驶路径进行确定,具体方式为:
19、对行驶路径优先级排序表的前三组行驶路径进行确认,并将前三组行驶路径标记为待提取路径;
20、获取待提取路径位于周期t内所出现的第一辆阻碍车辆以及最后一辆阻碍车辆的持续时长,将第一辆阻碍车辆的持续时长标记为cx1i,将最后一辆阻碍车辆的持续时长标记为cx2i,采用cx2i-cx1i=xqi得到不同待提取路径的选取值xqi;
21、根据选取值xqi的数值大小,选取参数最小的一组行驶路径,并将此行驶路径标定位最佳行驶路径,将所确定的最佳行驶路径传输至展示终端内。
22、优选的,所述展示终端,对所确定的最佳行驶路径进行展示,供外部人员进行查看。
23、进一步的,基于分割算法的果园路径导航系统的导航方法,包括以下步骤:
24、步骤一、根据所获取的导航信息以及路径信息,对本车的出发点以及目的地进行确认,根据距离参数,剔除整体距离较长的行驶路径,确认行驶路径;
25、步骤二、根据所确认的行驶路径,对此行驶路径内所出现的阻碍车辆进行确认,再根据阻碍车辆所出现的持续时长,以及阻碍车辆所出现的具体次数,对不同的行驶路径进行优先级排序;
26、步骤三、根据优先级排序,确认前三组排序名次的行驶路径,分析三组行驶路径的阻碍车辆持续时长,对最佳的行驶路径进行确认,将所确认的最佳行驶路径传输至展示终端内进行展示。
27、与现有技术相比,本发明的有益效果是:根据对应行驶路径内阻碍车辆所出现的次数以及行驶路径拥堵持续时长的最大值,进行合并分析并得到排序参数,后续根据排序参数,对不同的行驶路径进行排序;
28、根据所确定的优先级排序表,再根据排序参数,对数值表现较好的三组行驶路径进行确认,再根据所确认的行驶路径,对阻碍车辆的持续时长进行分析,若最后一组的阻碍车辆持续时长远远小于第一组阻碍车辆的持续时长,便代表此行驶路径内部的拥堵情况正在逐渐降低,故此行驶路径便可作为最佳行驶路径,以此达到较好的果园目的地路径导航的整体效果。
- 还没有人留言评论。精彩留言会获得点赞!