狭窄道路的轨迹规划方法、装置、电子设备及存储介质与流程
本发明属于汽车轨迹规划,具体涉及到一种狭窄道路的轨迹规划方法、装置、电子设备及存储介质。
背景技术:
1、狭窄道路是自动驾驶中典型的复杂环境,尤其在乡间小道、露天矿山等非结构化场景中广范存在,在道路边界不规则且自由空间严格受限的场景下,如何生成一条安全、平稳的行驶轨迹,是自动驾驶轨迹规划面临的难题。
2、自动驾驶轨迹规划在处理结构化道路/非结构化道路方面存在诸多差异。在坐标系选择方面:非结构化场景中,不存在明显的道路引导线,因此基于frenet坐标系的结构化道路轨迹方法显然不适用,需要在笛卡尔坐标系下处理非结构化场景下轨迹规划问题。在规划算法方面:基于优化方法的轨迹规划算法在较高质量的原始引导线加持下,可以在结构化道路场景中取得了较好的效果;但非结构化道路通常没有引导线,这也意味着优化算法通常没有初解,造成后续规划问题无法求解;同时基于优化方法的轨迹规划严重依赖初解质量;当初解不可行时,往往会造成求解失败,这也要求给定的初始解必须是可行解;尤其当道路场景为非结构化狭窄道路时,初解的优劣直接影响是否能否求解成功。
3、因此,在非结构化场景的自动驾驶过程中,需要一种能规划出一条安全、平滑路径的轨迹规划方法。
技术实现思路
1、针对上述问题,本发明的主要目的在于设计一种面向非结构化狭窄道路的b样条轨迹规划方法、装置、电子设备及存储介质,首先对狭窄环境道路进行建模,然后使用混合a*的离散化搜索结果作为轨迹规划的初解,并采用基于b样条曲线的优化方法构造轨迹规划问题,解决狭窄道路行驶过程中不易生成安全、平稳行驶轨迹的技术问题。
2、为了实现上述目的本发明采用如下技术方案:
3、一种面向非结构化狭窄道路的b样条轨迹规划方法,该方法包括如下步骤:
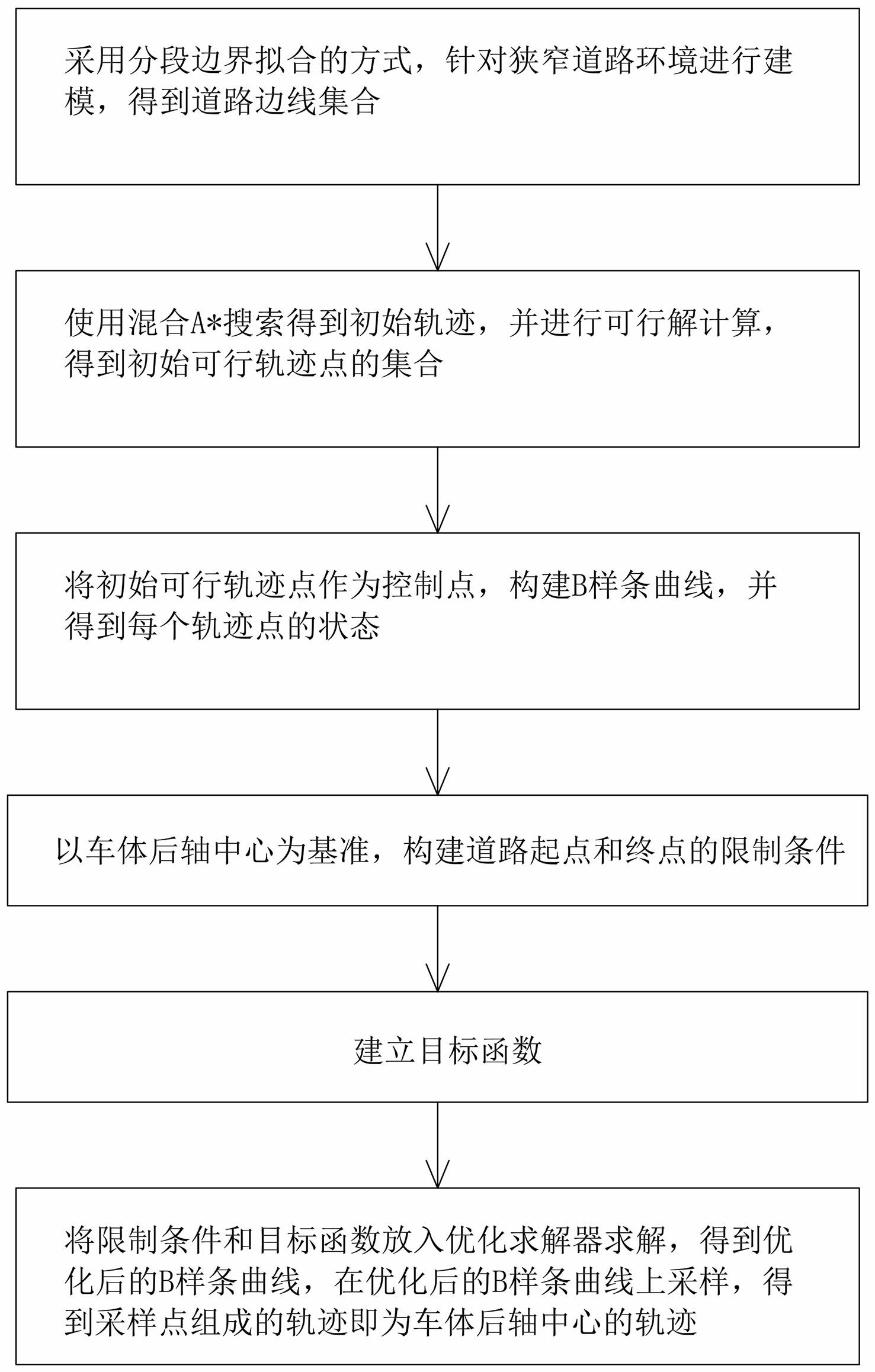
4、步骤1:采用分段边界拟合的方式,针对狭窄道路环境进行建模,得到道路边线集合;
5、步骤2:使用混合a*算法搜索得到初始轨迹,并进行可行解计算,得到初始可行轨迹点的集合;
6、步骤3:将初始可行轨迹点作为控制点,构建b样条曲线,并得到每个轨迹点的状态;
7、步骤4:以车体后轴中心为基准,构建道路起点和终点的限制条件;
8、步骤5:建立目标函数;
9、步骤6:将限制条件和目标函数放入优化求解器求解,得到优化后的b样条曲线,在优化后的b样条曲线上采样,得到采样点组成的轨迹即为车体后轴中心的轨迹。
10、作为本发明的进一步描述,步骤1中,狭窄道路环境建模的步骤如下:
11、步骤1.1:若当前边界线段集合为空,则取边界点集p中前2个点pi(i=0,1),形成直线lj(j=0),并计算直线的朝向theta;
12、步骤1.2:取边界点集p中下一个点pi+1,求解pi+1与步骤1.1中直线lj末端点形成的直线朝向theta_new;
13、步骤1.3:若abs(theta-thetanew)<theta_grid,则认为pi+1属于直线lj,可以用同一直线参数表示;否则,将以直线lj末端点及pi+1形成新的直线lj+1;
14、其中,theta_grid为设定的阈值;
15、步骤1.4:重复步骤1.2和步骤1.3,直至遍历完边界点集p,形成左边界直线集合bound_left、右边界直线集合bound_right,其中第i段边线的表达式为:aix+biy+ci=0,i=1...n;
16、作为本发明的进一步描述,将道路边线进行栅格化处理,每个栅格代表离散化的节点,各个节点间存在拓扑关联,所有栅格最终组成离散化地图,供步骤2中混合a*算法搜索使用;
17、步骤2中,混合a*算法中的代价函数为:
18、f(x)=g(x)+h(x)
19、其中,g(x)表示起点到当前点的代价,h(x)表示当前点到终点的代价;
20、在h(x)较大或者较小时,对代价函数进行调整,即:
21、f(x)=g(x)+nb*h(x)
22、其中,nb表示当前拓展节点附近的可行性区域节点数;
23、当nb较大时,表示当前节点处在开阔区域,此时,增加h(x)权重;当nb较小时,表示当前为狭窄空间,此时,需要更多的拓展节点;
24、基于上述算法,得到一系列节点组成的离散化序列,即初始可行解集合pci,即初始可行轨迹点的集合,其中,i=1,2…n,n为初始轨迹点数目。
25、作为本发明的进一步描述,步骤3中,构建b样条曲线的方式包括以下步骤:
26、步骤3.1:将初始可行轨迹点pc作为控制点,构建b样条曲线,表示为:
27、
28、其中,u表示节点向量,pci表示第i个控制点,ni,k(u)表示在u时的i各控制点对应的k阶基函数系数;
29、步骤3.2:在b样条曲线上均匀采样,得到采样点集以及对应的累计长度lengthi,i=1,2…num;每个状态包含当前点的x、y、theta。
30、作为本发明的进一步描述,步骤4中,起点和终点的限制条件构建方式包括如下步骤:
31、步骤4.1:计算左边界直线集合bound_left和右边界直线集合bound_right中每个线段在b样条曲线的投影,得到每条线段b样条长度s方向的投影范围start_s、end_s,即s值,并保存在直线段上;
32、步骤4.2:根据当前轨迹点的s值,取bound_left、bound_right位于s值前后的直线段;
33、步骤4.3:将车体后轴中心放置在每个轨迹点,得到行驶到轨迹点处的车体轮廓,并计算车体轮廓与步骤4.2中直线段的最小距离,作为该轨迹点的左右条件约束b_l、b_r;
34、步骤4.4:针对每个轨迹点均进行计算,得到所有待优化轨迹点的左右边界条件约束b_ls、b_rs;
35、步骤4.5:起点和终点的限制条件为:起点的限制条件为p0=[x0,y0,theta0],终点的限制条件为pend=[xend,yend,thetaend]。
36、作为本发明的进一步描述,步骤5中,设置代价函数cost=w1∫bs′2+w2∫bs″2+w3∫bs″′2;
37、其中,bs′为b样条曲线的一阶导数,bs″为b样条曲线的二阶导数,bs″′为b样条曲线的三阶导数,w1为b样条曲线一阶导数对应的权重系数,w2为b样条曲线二阶导数对应的权重系数,w3为b样条曲线三阶导数对应的权重系数。
38、作为本发明的进一步描述,步骤6中,将步骤4的限制条件和步骤5的代价函数代入求解器,得到优化后的b样条曲线函数
39、在优化后的b样条曲线上按照等间隔进行采样,得到一系列的位姿点i=1,2…n,所有位姿点组成的轨迹即为车体行驶的轨迹。
40、一种用于狭窄道路的车辆轨迹规划装置,所述装置包括获取模块和生成模块;
41、所述的获取模块,用于获取狭窄道路的边界,以及环境信息;
42、所述的生成模块,用于得到初始轨迹,并构建b样条曲线、构建道路起点和终点的限制条件、建立目标函数,进而得到优化后的b样条曲线,并在优化后的b样条曲线上进行采样,得到车体行驶的轨迹。
43、一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,所述处理器、所述通信接口和所述存储器通过所述通信总线完成相互间的通信,所述存储器,用于存储计算机程序;
44、所述处理器,用于通过运行所述存储器上所存储的所述计算机程序,执行上述轨迹规划方法的步骤。
45、一种计算机可读的存储介质,所述存储介质中存储有计算机程序,其中,所述计算机程序被处理器执行时实现上述轨迹规划方法的步骤。
46、相对于现有技术,本发明的技术效果为:
47、本发明提供了一种面向非结构化狭窄道路的b样条的轨迹规划方法、装置、电子设备及存储介质,使用多段线性方程描述狭窄道路的边界,避免逐点遍历道路边界带来的计算困难,提升计算效率,同时,使用混合a*搜索得到初始轨迹,并根据周边自由空间的大小,动态调整启发项权重,在保证最大程度搜索到可行性解的同时,提高算法收敛速度,另外,本发明以可行性解为输入,结合车辆运动学模型为约束,建立轨迹优化求解模型,得到安全、平滑的最优路径,有效的提高优化求解成功率及效率。
- 还没有人留言评论。精彩留言会获得点赞!