一种用于边坡监测的方法及系统与流程
本发明涉及边坡监测,具体而言,涉及一种用于边坡监测的方法及系统。
背景技术:
1、边坡监测(slopemonitoring)是指为掌握边坡岩石移动状况,发现边坡破坏预兆,对边坡位移的速度、方向等进行的监测。当前,对于矿山一般采用长期观测法,在裂隙两侧设置观测桩,先测量桩距的变化,再计算边坡的位移。
2、边坡稳定问题由于受其复杂的地质条件的影响,一直是岩土工程界关注的焦点问题。随着国民经济的快速发展,人类的工程活动必然越来越频繁,规模也越来越大。同时,由于工程场地的可选余地正在减少,工程设计在一定程度上将面临更加复杂的地质条件。因此,在进行边坡设计时需要更多的考虑边坡的地质条件对其稳定性的影响及其变化趋势。
3、可见边坡监测与反馈分析是边坡工程中的一个重要环节。边坡工程监测的主要目的包括:
4、(a)为了保证工程施工和运行的安全。
5、(b)评价边坡理论分析结果和经验判断成果的依据,是修改设计和指导施工的客观标准。
6、(c)为工程岩土体力学参数的反演分析提供资料。
7、(d)为掌握边坡变形特征和规律提供资料,指导在边坡发生严重变形条件下的应急处理。
8、(e)为分析岩体结构与边坡变形破坏的关系,预测边坡变形破坏趋势,评价边坡的长期稳定性提供条件。
9、目前常见的边坡监测方式有:基于gnss的地表位移监测、锚索测力计应力监测、深部位移监测、裂缝监测、地下水位监测等方案。
10、然而,以上几种方案各有优缺点。并且,基于gnss的地表位移监测、锚索测力计应力监测、深部位移监测、裂缝监测、地下水位监测等方案,均需在被测边坡上安装设备,同时存在供电及通讯线路的安装及配置工作,需考虑设备安装以及设备供电问题,增加了监测实施的复杂性和作业难度。
技术实现思路
1、鉴于此,本发明的目的在于提供一种更加简便更加经济更加稳定可靠更加直观的监测方案,能够同时地表位移、深部位移进行监测。
2、本发明提供一种用于边坡监测的方法,包括以下步骤:
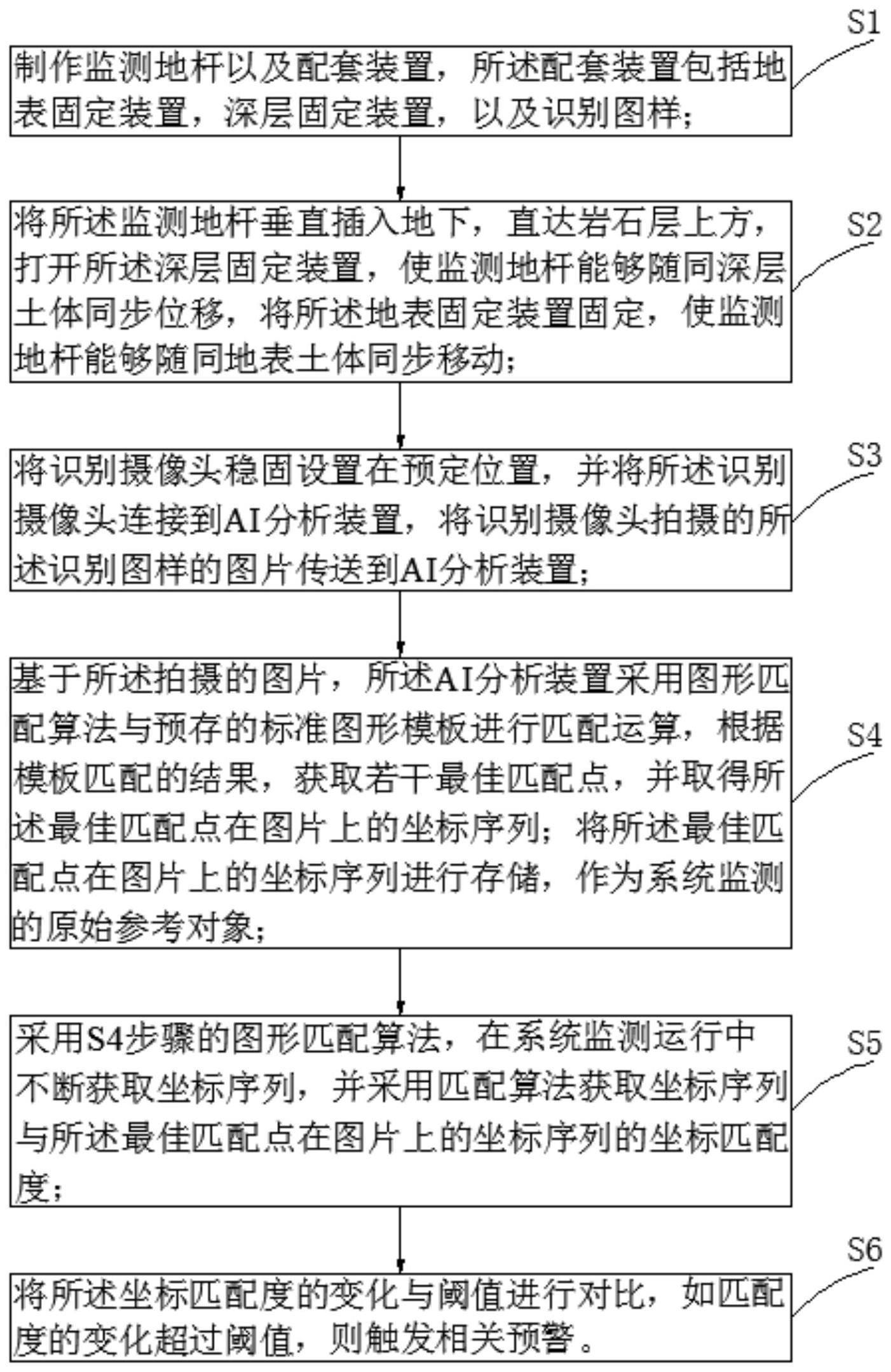
3、s1、参见图3所示,制作监测地杆以及配套装置,所述配套装置包括地表固定装置,深层固定装置,以及识别图样(可识别图形);
4、s2、将所述监测地杆垂直插入地下,直达岩石层上方,打开所述深层固定装置,使监测地杆能够随同深层土体同步位移,将所述地表固定装置固定,使监测地杆能够随同地表土体同步移动;
5、边坡发生滑坡等地质灾害前,均会出现深层土体的位移,或者地表土体的位移,此二者的位移均会导致监测地杆的移动或倾斜,均会造成监测地杆上部的识别图样(可识别图形)的位置发生变化。因此通过识别摄像头利用图形分析技术,根据对监测地杆上部的识别图样(可识别图形)的位置变化分析,直接获知地质灾害预警信息,为地质灾害预警做出提前预报。
6、s3、将识别摄像头稳固设置在预定位置,并将所述识别摄像头连接到ai分析装置,将识别摄像头拍摄的所述识别图样的图片传送到ai分析装置;
7、s4、基于所述拍摄的图片,所述ai分析装置采用图形匹配算法与预存的标准图形模板进行匹配运算,根据模板匹配的结果,获取若干最佳匹配点,并取得所述最佳匹配点在图片上的坐标序列pxy1、pxy2、pxy3、pxy4...pxyi;将所述最佳匹配点在图片上的坐标序列进行存储,作为系统监测的原始参考对象;
8、s5、采用s4步骤的图形匹配算法,在系统监测运行中不断获取坐标序列,并采用匹配算法获取坐标序列与所述最佳匹配点在图片上的坐标序列的坐标匹配度,坐标匹配度的计算表达式为;
9、r(x,y)=∑x′,y′(t(x′,y′)-i(x+x′,y+y'))2 (1)
10、式(1)中,r为匹配值,t为模板像素矩阵,i为待匹配图片的像素矩阵,x、y为最佳匹配点在图片上的坐标,x′、y′为在系统监测运行中不断获取的坐标序列;
11、s6、将所述坐标匹配度的变化与阈值进行对比,如匹配度的变化超过阈值,则触发相关预警。
12、进一步地,所述s1步骤的所述地表固定装置安装设置在将监测地杆垂直插入地下,直达岩石层上方之后,地表土体所对应的所述监测地杆的高度位置。
13、进一步地,所述s1步骤的所述深层固定装置安装设置在将监测地杆垂直插入地下,直达岩石层上方之后,深层土体所对应的所述监测地杆的高度位置。
14、进一步地,所述s1步骤的所述识别图样设置在监测地杆的上部,在所述s3步骤的识别摄像头的拍摄范围内。
15、进一步地,所述s6步骤的将所述坐标匹配度的变化与阈值进行对比,如匹配度的变化不超过阈值,则不触发预警。
16、本发明还提供一种用于边坡监测的系统,用于实现如上述所述的用于边坡监测的方法,包括:
17、识别摄像头(远程监测):用于将拍摄的所述识别图样的图片传送到ai分析装置;
18、地表固定装置:用于使监测地杆能够随同地表土体同步移动;
19、深层固(锚)定装置:用于使监测地杆能够随同深层土体同步移动;
20、识别图样(可识别图形):用于通过识别摄像头的拍摄,利用图形分析技术,对监测地杆上部的位置变化分析;
21、ai分析装置:用于对拍摄的识别图样的图片,进行模板匹配,获取最佳匹配点,取得最佳匹配点在图片上的坐标序列并存储作为系统监测的原始参考对象,不断获取坐标序列并计算坐标匹配度,将坐标匹配度的变化与阈值进行对比,根据对比情况作出是否触发预警的命令。
22、进一步地,所述ai分析装置包括:
23、模板匹配单元:基于所述拍摄的图片,采用图形匹配算法与预存的标准图形模板进行匹配运算,根据模板匹配的结果,获取若干最佳匹配点,并取得所述最佳匹配点在图片上的坐标序列pxy1、pxy2、pxy3、pxy4...pxyi。
24、存储单元:用于将所述最佳匹配点在图片上的坐标序列进行存储,作为系统监测的原始参考对象;
25、图形匹配单元:采用s4步骤的图形匹配算法,在系统监测运行中不断获取坐标序列,并采用匹配算法获取坐标序列与所述最佳匹配点在图片上的坐标序列的坐标匹配度;
26、坐标匹配度对比单元:用于将坐标匹配度的变化与阈值进行对比,如匹配度的变化超过阈值,则触发相关预警。
27、本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如上述所述的用于边坡监测的方法的步骤。
28、本发明还提供一种计算机设备,所述计算机设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述所述的用于边坡监测的方法的步骤。
29、与现有技术相比,本发明的有益效果在于:
30、本发明用于边坡监测的方法能够同时对地表位移、深部位移进行监测,监测效果更加稳定,监测结果更具有参考意义,并且安装更加便捷,无需考虑设备供电问题,降低了安装复杂性和安装难度。
- 还没有人留言评论。精彩留言会获得点赞!