一种城市地下空间智能测绘方法、系统、装置和储存介质与流程
本技术涉及城市测绘,尤其是涉及一种城市地下空间智能测绘方法、系统、装置和储存介质。
背景技术:
1、随着城市建设的发展,城市地下管线在种类和数量上均不断增多,管线应用于供水、排水、燃气、热力、电力、通信以及工业等重要基础设施,形成了城市地下复杂的管网体系。在铺设新增的管道时,工作人员需要对旧管道进行探测,以减少对原有管网体系的影响。
2、现有的管道测绘设备包括管道测绘机器人,可方便工作人员对难以进入的管道进行测绘。管道测绘机器人通常用线缆连接到底面的线缆车上以进行供电,同时线缆可传输控制数据和测绘数据,单个管口的测绘完成后工作人员可将管道测绘机器人转移到其他的管口进行后续测量。
3、在测绘过程中,管道测绘机器人受控于使用者在管道中行进,由于线缆长度有限,在单次测绘完成后需使机器人按照测绘路线返回起始位置,工作人员需等待机器人返回以进行后续测绘,使测绘周期延长,造成不便。
技术实现思路
1、为了减少城市地下管线的测绘耗时,本技术提供一种城市地下空间智能测绘方法、系统、装置和储存介质。
2、第一方面,本技术提供一种城市地下空间智能测绘方法,采用如下的技术方案:
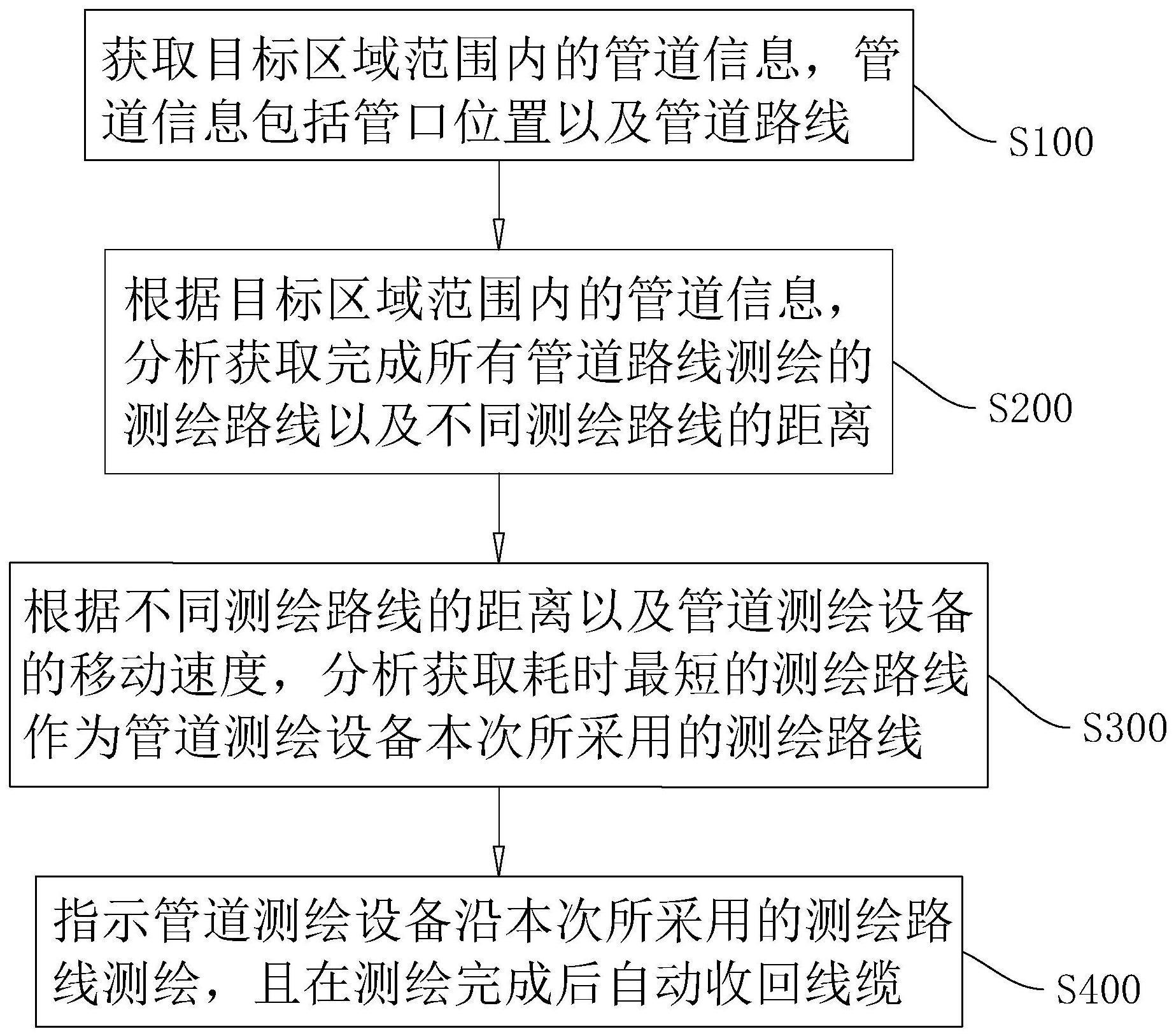
3、一种城市地下空间智能测绘方法,包括获取目标区域范围内的管道信息,管道信息包括管口位置以及管道路线;
4、根据目标区域范围内的管道信息,分析获取完成所有管道路线测绘的测绘路线以及不同测绘路线的距离;
5、根据不同测绘路线的距离以及管道测绘设备的移动速度,分析获取耗时最短的测绘路线作为管道测绘设备本次所采用的测绘路线;
6、指示管道测绘设备沿本次所采用的测绘路线测绘,且在测绘完成后自动收回线缆。
7、通过采用上述技术方案,对目标区域范围内的管道进行测绘时,可对已知的管道路线和管口位置设计测绘路线,以用于进行管道深度、管道坡度等数据的采集,对每条测绘路线进行耗时计算可以得到耗时最短的测绘路线,并在测绘完成后设备自身收回线缆,相对原本需要设备沿测绘路径折返以回收线缆的方式减少了折返耗费的时间,由此减少城市地下管线的测绘耗时。
8、可选的,分析获取耗时最短的测绘路线作为管道测绘设备本次所采用的测绘路线包括:
9、获取测绘路线所包含路段的路面状况以及路段长度;
10、根据路面状态与管道测绘设备的移动速度的对应关系、路段长度,分析获取不同测绘路线的耗时,并选择耗时最短的测绘路线作为管道测绘设备本次所采用的测绘路线。
11、通过采用上述技术方案,由于管道铺设在路面下方一定深度,且为了节约成本,管道布设的深度在一定的范围内,可根据路面的坡度预计路面下方铺设方向沿道路方向的管道坡度,在设备沿管道坡度向上或向下时,设备的移动速度不同,由此提高测绘路线耗时计算的准确度,更准确地选择耗时最短路线。
12、可选的,分析获取耗时最短的测绘路线作为管道测绘设备本次所采用的测绘路线包括:
13、获取管道测绘设备的最大移动距离;
14、判断是否存在测绘路线的距离小于管道测绘设备的最大移动距离;
15、若为是,则根据相应部分测绘路线的距离以及管道测绘设备的移动速度,分析获取耗时最短的相应部分测绘路线;
16、若为否,则获取管道测绘设备于剩余部分测绘路线的最大移动范围以及剩余部分测绘路线所对应的管口位置,定义管口存在多个;
17、根据管道测绘设备于剩余部分测绘路线的最大移动范围、剩余部分测绘路线所对应的管口位置,分析获取组合后的最大移动范围满足完成所有管道路线测绘要求的剩余部分测绘路线组合;
18、根据剩余部分测绘路线组合所分配的管道测绘设备于不同管口位置的移动距离以及管道测绘设备的移动速度,分析获取管道测绘设备于不同剩余部分测绘路线的耗时;
19、根据预设的用户移动管道测绘设备速度、剩余部分测绘路线组合所对应的管口位置,分析获取管道测绘设备于外部的移动耗时;
20、根据管道测绘设备于外部的移动耗时与管道测绘设备于不同剩余部分测绘路线的耗时之和,分析获取管道测绘设备于不同剩余部分测绘路线的有效耗时;
21、根据所分析获取相应部分测绘路线的最短耗时与管道测绘设备于不同剩余部分测绘路线的最短有效耗时的比较结果,确定最短耗时所对应的测绘路线,作为管道测绘设备本次所采用的测绘路线。
22、通过采用上述技术方案,由于测绘设备的线缆长度有限,对于不同的测绘路线中路线长度大于管道测绘设备的线缆长度的,可对测绘路线进行分段测绘,由于分段测绘需要工作人员在每段测绘后移动地上设备到分段测绘的终点以进行后续测绘,需要计算每种组合的地下及地上移动时间总和以得到测绘整体耗时;对于不同测绘路线中长度小于管道测绘设备线缆长度的,可计算设备沿路线的移动耗时,通过将两种测绘路线做比较,得到不同测绘路线中最短的测绘耗时,使测绘路线较长时对路线的测绘耗时计算将各种测绘路线进行比较,且不同测绘路线的耗时计算更符合实际情况,以提高选择的最短耗时路线计算的准确性,得到不同路线中的最短耗时路线以减少城市地下空间测绘的耗时。
23、可选的,管道测绘设备于不同剩余部分测绘路线的耗时的获取包括:
24、获取剩余部分测绘路线所包含路段的路面状况以及路段长度;
25、根据路面状况与管道测绘设备的移动速度的对应关系、路段长度,分析获取不同测绘路线的耗时。
26、通过采用上述技术方案,在进行分段测绘时,可通过路面坡度预计路面下方铺设方向沿道路方向的管道坡度,并根据设备沿不同管道坡度向上或向下时的不同速度计算不同测绘路线的耗时,使测绘路线耗时计算更符合实际情况,以更准确地选择耗时最短路线。
27、可选的,分析获取不同测绘路线的耗时包括:
28、获取测绘开始后预设时间范围内不同管道的风力信息,风力信息包括风向以及风力;
29、根据风力信息关于管道测绘设备的移动速度的影响程度以及路面状况与管道测绘设备的移动速度的对应关系、路段长度,分析获取不同测绘路线的耗时。
30、通过采用上述技术方案,在不同风力天气下,管道内的风向以及风力受外部影响而不同,管道测绘设备在管道内移动时受到管道内的风力作用而对移动速度产生影响,当设备移动方向与管道内的风向相同时,设备移动速度加快,当设备移动方向与管道内的风向相反时,设备移动速度减慢,使测绘的耗时影响,计算不同测绘路线的移动耗时通过计算风力影响提高耗时计算的准确性,以在风力状况不同时更准确地选择耗时最短路线。
31、可选的,管道测绘设备于不同剩余部分测绘路线的耗时的获取包括:
32、获取测绘开始后预设时间范围内不同管道的积水量;
33、分析不同剩余部分测绘路线中是否存在所获取的积水量超过预设积水量的管道;
34、若为是,则从测绘路线中去除超过预设积水量的管道,规划完成管道路线测绘要求的剩余部分测绘路线组合,并根据剩余部分测绘路线组合所分配的管道测绘设备于不同管口位置的移动距离以及管道测绘设备的移动速度,分析获取管道测绘设备于不同剩余部分测绘路线的耗时;
35、若为否,则根据剩余部分测绘路线组合所分配的管道测绘设备于不同管口位置的移动距离以及管道测绘设备的移动速度,分析获取管道测绘设备于不同剩余部分测绘路线的耗时。
36、通过采用上述技术方案,由于管道测绘设备在管道中移动时积水量过多可能使设备难以移动且容易进水出现故障,且管道中的积水通常较为浑浊,若在水中进行拍摄容易受到阻挡,难以正常采集测绘数据,可通过将积水量超过预设值的管道从测绘路线中去除,以使测绘路线以及测绘耗时的计算更符合实际情况,降低测绘过程中遇到积水过多而需要临时绕过管道的可能性,使选择的耗时最短路线更准确。
37、可选的,分析获取管道测绘设备于不同剩余部分测绘路线的耗时包括:
38、根据不同剩余部分测绘路线的积水量以及路面状况,分析获取不同剩余部分测绘路线的积水深度;
39、根据不同剩余部分测绘路线的积水深度关于管道测绘设备的移动速度的影响程度以及管道测绘设备的移动速度、路段长度,分析获取不同剩余部分测绘路线的耗时。
40、通过采用上述技术方案,对于积水量小于等于预设值的管道,设备在相应管道中的移动速度受到积水影响,通过将积水深度对应设备移动速度受到的影响,可提高耗时计算的准确性,积水的深度越深,设备移动过程中受到的阻力越大,设备的移动速度越慢,使选择的耗时最短的测绘路线更准确且符合实际。
41、第二方面,本技术提供一种城市地下空间智能测绘系统,采用如下的技术方案:
42、一种城市地下空间智能测绘系统,包括:
43、获取模块,用于获取目标区域范围内的管道信息;
44、存储器,用于存储第一方面中的任一种城市地下空间智能测绘方法的程序;
45、处理器,存储器中的程序能够被处理器加载执行且实现第一方面中的任一种城市地下空间智能测绘的控制方法。
46、通过采用上述技术方案,通过获取模块获取目标区域范围内的管道信息并输送至处理器,通过存储器将第一方面的一种城市地下空间智能测绘方法的程序进行存储,通过处理器将目标区域范围内的管道信息经第一方面中的方法进行处理,得到耗时较短的测绘路线,以减少城市地下管线的测绘耗时。
47、第三方面,本技术提供一种管道测绘设备,采用如下的技术方案:
48、一种管道测绘设备,包括存储器和处理器,存储器上存储有能够被处理器加载并执行第一方面中任一种方法的计算机程序。
49、通过采用上述技术方案,通过存储器将第一方面的一种城市地下空间智能测绘方法的程序进行存储,通过处理器加载第一方面中的一种城市地下空间智能测绘方法并将目标区域范围内的管道信息经第一方面中的方法进行处理,得到耗时最短的测绘路线,以减少城市地下管线的测绘耗时。
50、第四方面,本技术提供一种计算机存储介质,能够存储相应的程序,具有便于实现减少城市地下管线的测绘耗时的特点,采用如下的技术方案:
51、一种计算机存储介质,存储有能够被处理器加载并执行第一方面中任一种城市地下空间智能测绘方法的计算机程序。
52、通过采用上述技术方案,通过计算机存储介质存储有第一方面中的一种城市地下空间智能测绘方法,从而在需要进行测绘时,通过城市地下空间智能测绘方法分析得到耗时较短的管道测绘路径以减少测绘耗时。
53、综上所述,本技术包括以下至少一种有益技术效果:
54、1.将目标区域内的管道位置形成管道测绘路线,设备在测绘完成后可收回线缆无需沿原路径折返,并根据路面坡度模拟管道坡度,计算设备在管道内的移动耗时以得到最短耗时的管道测绘路线,相对原本在地面上按照工人经验手动控制并需要设备原路折返的方式可减少城市地下管线的测绘耗时。
55、2.在目标区域内的管道测绘路线较长时,将地下移动的测绘耗时和外部设备移动耗时作为路线的整体耗时,以更准确地选择耗时最短的测绘路径。
56、3.在计算耗时中考虑风力、风向以及积水因素的影响,使耗时计算更符合实际情况,以根据天气情况不同选择不同测绘路线中耗时更短的测绘路线。
- 还没有人留言评论。精彩留言会获得点赞!