星载单光子激光雷达海洋区域噪声估计方法及系统
本发明属于激光遥感,具体涉及星载单光子激光雷达海洋区域噪声估计方法及系统。
背景技术:
1、卫星海洋遥感技术在海洋观测系统中占据非常重要的地位,在全球海洋碳循环、海平面上升、海浪观测等领域起到了十分重要的作用。其中,星载单光子激光雷达以其高灵敏度,高分辨率以及高测量精度在海洋探测、水下测深、海洋次表层光学参数探测等方面展现了惊人的应用前景。icesat-2(ice,cloud,and land elevation satellite-2)卫星携带了世界上第一个星载单光子激光雷达,atlas(advanced topographic laser altimetersystem),能够对返回的微弱的光子量级的信号进行响应。
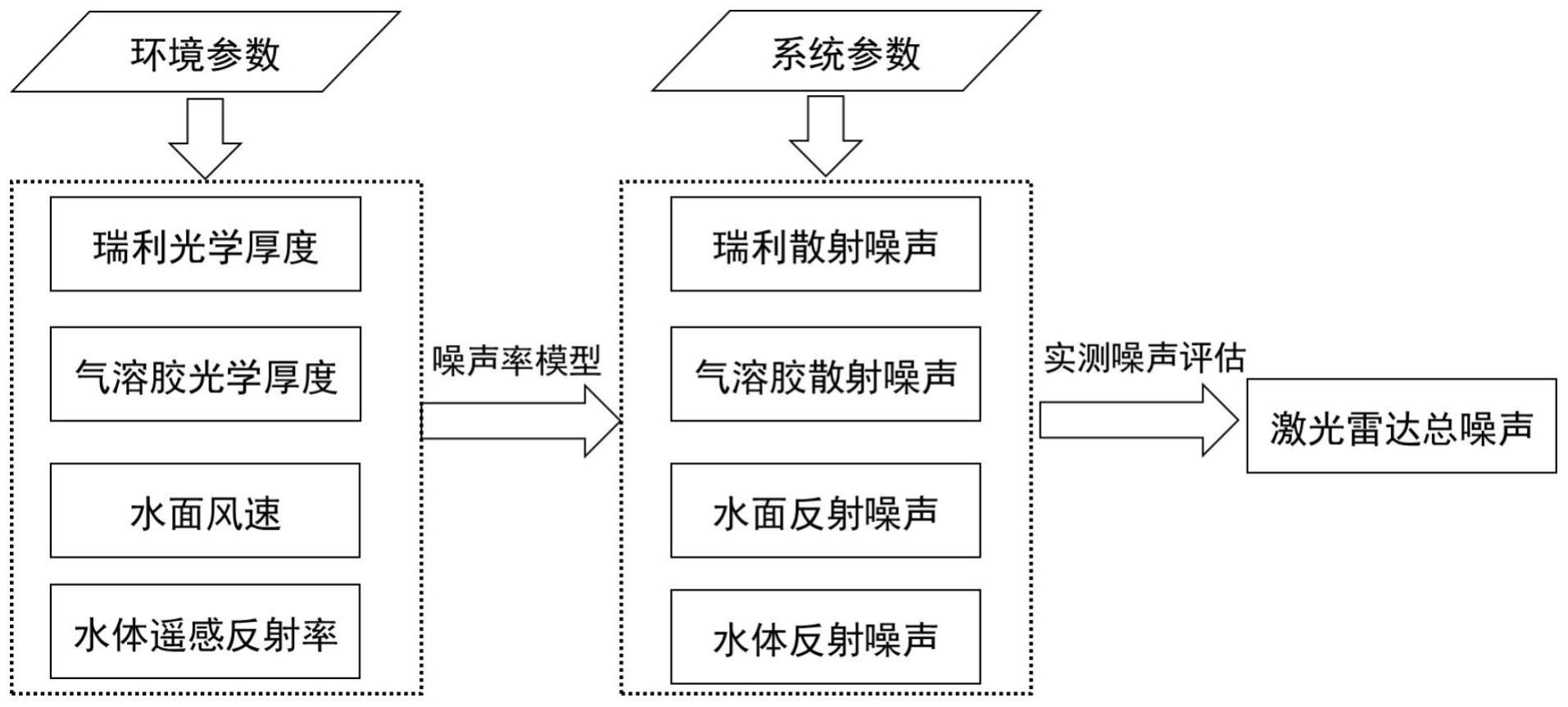
2、太阳辐射是星载单光子激光雷达系统日间最主要的噪声源,太阳辐射被大气、水面、水体等后向反射的光子也可能被激光雷达接收系统接收并记录,形成噪声光子点云。一个准确的噪声估计模型对于激光雷达噪声数据的进一步应用(如水陆分类、海冰分类等应用),以及对于未来星载激光雷达的系统设计及优化有重大意义。对大气、水面、水体后向反射噪声项进行精确建模,通过输入激光雷达系统参数和环境参数,即可以实现星载单光子激光雷达海洋区域的噪声估计。
3、degnan提出了一个星载单光子激光雷达陆地噪声模型(简称为degnan模型),该模型将大气简化为全部同向散射且不存在吸收的气体粒子,推导出了大气后向散射噪声。且degnan模型中将地表近似为朗伯体,而水面主要反射特征为镜面反射,与朗伯体反射差异很大。目前已发表的噪声模型大都是基于degnan模型,只能大致评估噪声的量级,有较大的误差(大于50%)。
技术实现思路
1、本发明是为了解决上述问题而进行的,目的在于提供星载单光子激光雷达海洋区域噪声估计方法及系统,能够大大提升噪声估计精度。
2、为了实现以上目的,本发明采用了以下方案:
3、<方法>
4、如图1所示,本发明提供星载单光子激光雷达海洋区域噪声估计方法,包括以下步骤:
5、步骤1,计算大气瑞利散射噪声fr:
6、
7、式中,f是星载激光雷达系统标定系数;η是整体接收系统效率,包括光学系统接收效率与探测器量子效率;nλ是太阳在大气层外的辐照度;θr是系统接收半视场角;ar是望远镜口径大小;hv是单个光子能量;pr为瑞利散射相位函数;角度θs和φs分别是从海面测量点到太阳的矢量的天顶角和方位角;r(θ)是入射角为θ时水气界面的菲涅耳反射率;τr为瑞利光学厚度;δλ是滤光片带宽;α是散射角;θv和φv分别是icesat-2接收望远镜到海面测量点的天底角和方位角;θ±=±θs,θ+=+θs,θ﹣=﹣θs;
8、步骤2,计算大气气溶胶散射噪声fa:
9、
10、式中,wa是气溶胶单次散射比率,τa是气溶胶光学厚度,a、g1、g2均为根据历史数据确定的常数;
11、步骤3,计算水面反射噪声;
12、步骤4,计算水面以下的水体反射噪声;
13、步骤5,基于步骤1~4计算激光雷达总噪声。
14、优选地,本发明提供的星载单光子激光雷达海洋区域噪声估计方法,在步骤3中,水面反射噪声fsurf包括水面白沫反射产生的背景光噪声fs,foam和水面镜面反射产生的背景光噪声fs,specular;水面镜面反射产生的背景光噪声为:
15、
16、式中,ρs是水面菲涅尔反射率;ta是正天顶方向的大气直射透过率;s2是海面均方根斜率。
17、优选地,本发明提供的星载单光子激光雷达海洋区域噪声估计方法,在步骤2中,a=0.983、g1=0.82、g2=﹣0.55;在步骤3中,s2=0.003+0.00512u10,u10是海面上方10米处的风速。
18、优选地,本发明提供的星载单光子激光雷达海洋区域噪声估计方法,在步骤4中,水体反射噪声fw:
19、
20、式中,rrs是表观光学系数遥感反射率。
21、优选地,本发明提供的星载单光子激光雷达海洋区域噪声估计方法,在步骤5中,激光雷达总噪声fall=大气瑞利散射噪声fr+大气气溶胶散射噪声fa+水面反射噪声fsurf+水体反射噪声项fw+探测器暗计数噪声fd。
22、<系统>
23、进一步,本发明还提供能够自动实现上述<方法>的星载单光子激光雷达噪声估计系统,包括:
24、fr计算部,计算大气瑞利散射噪声fr:
25、
26、式中,f是星载激光雷达系统标定系数;η是整体接收系统效率,包括光学系统接收效率与探测器量子效率;nλ是太阳在大气层外的辐照度;θr是系统接收半视场角;ar是望远镜口径大小;hv是单个光子能量;pr为瑞利散射相位函数;角度θs和φs分别是从海面测量点到太阳的矢量的天顶角和方位角;r(θ)是入射角为θ时水气界面的菲涅耳反射率;τr为瑞利光学厚度;δλ是滤光片带宽;α是散射角;θv和φv分别是icesat-2接收望远镜到海面测量点的天底角和方位角;θ±=±θs,θ+=+θs,θ﹣=﹣θs;
27、fa计算部,计算大气气溶胶散射噪声fa:
28、
29、式中,wa是气溶胶单次散射比率,τa是气溶胶光学厚度,a、g1、g2均为根据历史数据确定的常数;
30、总噪声计算部,基于fr、fa计算激光雷达总噪声fall;
31、控制部,与fr计算部、fa计算部均通信相连,控制它们的运行。
32、本发明提供的星载单光子激光雷达噪声估计系统,还可以包括:激光雷达参数优化部,与控制部通信相连,根据fr、fa和激光雷达总噪声fall对激光雷达系统参数进行优化配置。
33、本发明提供的星载单光子激光雷达噪声估计系统,还可以包括:fsurf计算部,计算水面反射噪声fsurf;和fw计算部,计算水面以下的水体反射噪声fw;其中,星载单光子激光雷达噪声估计系统是用于海洋区域进行噪声估计;总噪声计算部基于fr、fa、fsurf、fw计算激光雷达总噪声fall;控制部与fr计算部、fa计算部、fsurf计算部、fw计算部均通信相连,控制它们的运行;激光雷达参数优化部根据fr、fa、fsurf、fw和激光雷达总噪声fall对激光雷达系统参数进行优化配置。
34、本发明提供的星载单光子激光雷达噪声估计系统,还可以包括:输入显示部,与控制部通信相连,用于让用户输入操作指令,并进行相应显示。
35、优选地,本发明提供的星载单光子激光雷达噪声估计系统,在fsurf计算部中,水面反射噪声fsurf包括水面白沫反射产生的背景光噪声fs,foam和水面镜面反射产生的背景光噪声fs,specular;水面镜面反射产生的背景光噪声为:
36、
37、式中,ρs是水面菲涅尔反射率;ta是正天顶方向的大气直射透过率;s2是海面均方根斜率。
38、发明的作用与效果
39、本发明方法综合考虑大气瑞利散射、气溶胶散射、水面白沫反射、镜面反射以及水面以下水体反射噪声的贡献,对噪声进行精确建模,将大气详细分解为瑞利散射和气溶胶散射两部分并提出了相应噪声公式,并且对海洋表面镜面反射特征精确建模,进而估计激光雷达系统或已发射卫星的噪声大小,可以极大提升精度,科学、可靠地辅助激光雷达系统参数的设计优化,对于分析系统参数及环境参数对噪声大小的影响,以及后续单光子激光雷达卫星的设计有重要意义。本发明系统可以通过星载单光子激光雷达参数,及各项环境参数的输入,快速准确的估计星载单光子激光雷达噪声大小,用于星载激光雷达海洋激光雷达优化设计。并且,对于星载单光子激光雷达其它区域的噪声评估,本发明中的瑞利散射和气溶胶散射计算仍然可以很好适用。
- 还没有人留言评论。精彩留言会获得点赞!