一种管道用清管器的跟踪方法与流程
本发明涉及清管器定位领域,具体地,涉及一种管道用清管器的跟踪方法。
背景技术:
1、清管器是由气体、液体或管道输送介质推动,用于清理管道的专用工具。它可以携带电磁发射装置与地面接收仪器共同构成电子跟踪系统,还可配置其他配套附件,完成各种复杂管道作业任务。
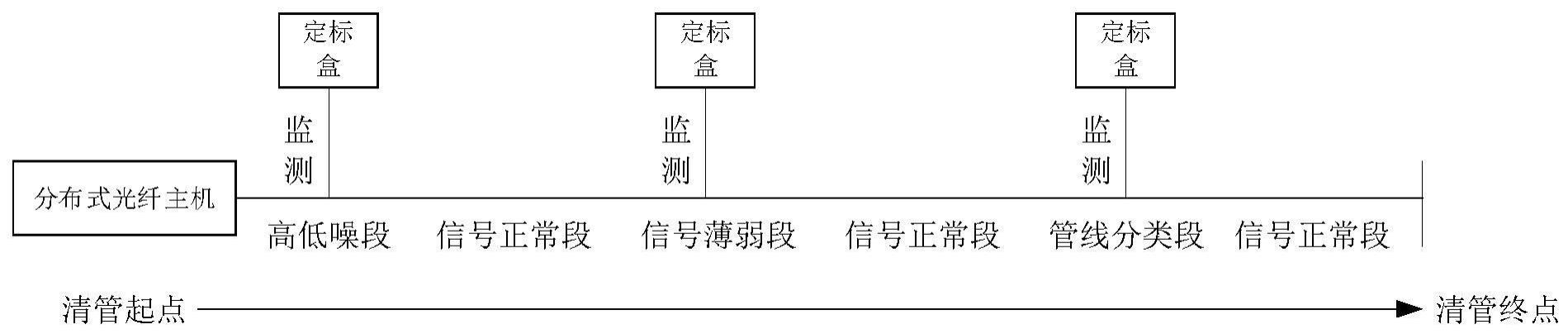
2、清管器在使用的过程中需要对其进行定位,现有的清管器定位方法为基于分布式光纤传感的清管器跟踪方法,可以利用与管道同沟铺设的光纤,通过传递清管器经过时与管道的振动信号,返回计算机处理后,可以获得清管器的实时位置。但是存在以下缺点:虽然光纤传感跟踪系统能够测量到大部分皮长的振动信号,但是现场光纤铺设条件受限、随光纤长度增加信号减弱、管线分离等因素影响下,导致部分区域信号薄弱甚至无信号以及在高底噪区域,清管器经过信号可能被淹没,导致现有的光纤传感跟踪系统在上述区域无法有效的对清管器进行跟踪测量。
技术实现思路
1、本发明目的是实现清管器全管线实时无盲区的跟踪。
2、为实现上述目的,本发明提供了.一种管道用清管器的跟踪方法,所述管道同沟铺设有光纤,基于所述光纤设有光纤传感跟踪系统,所述方法包括:
3、步骤1:将清管器从清管起点至清管终点进行多次运行,每次运行过程中利用光纤传感跟踪系统采集管道皮长对应的振动数据,分别获得一组振动数据,共计获得多组振动数据;
4、步骤2:对多组振动数据进行分析,基于多组振动数据绘制振动时域图,基于振动时域图获得清管器运行轨迹,将清管器运行轨迹对应的振动信号数值均小于或等于第一阈值的管道皮长区域命名为第一待测区域,将多组振动数据中环境干扰信号均大于或等于第二阈值的管道皮长区域命名为第二待测区域;
5、步骤3:在第一待测区域和第二待测区域均安装定标盒,所述定标盒用于测量对应区域中清管器的振动信号数据;
6、步骤4:开始清管器跟踪,当清管器运行至第一待测区域或第二待测区域时,利用定标盒采集获得清管器经过该区域对应管道皮长的时间t1,利用光纤传感跟踪系统采集获得清管器经过该区域对应管道皮长的时间t2,基于t1和t2计算出清管器经过该区域对应管道皮长的最终时间。
7、申请人发现了现有光纤传感跟踪系统在跟踪清管器时存在盲区的缺陷,本方法首先将清管器在管道上进行多次运行,然后采集振动数据,通过对振动数据进行分析,对上述盲区进行了准确的定位,然后在盲区的对应区域安装定标盒,通过定标盒测量获得的清管器经过时间和光纤传感跟踪系统测量获得的清管器经过时间总和计算获得上述盲区对应的清管器最终的经过时间,实现了全线实时的对清管器的无盲区跟踪。
8、进一步的,所述方法还包括:
9、步骤5:当清管器运行至第一待测区域和第二待测区域以外的区域时,利用光纤传感跟踪系统采集获得清管器经过该区域对应管道皮长的时间。
10、利用步骤4获得的清管器经过盲区的时间加上光纤传感跟踪系统采集获得清管器经过剩余管道皮长的时间实现了清管器的全线监测。
11、进一步的,所述步骤4中,基于t1和t2采用以下公式计算出清管器经过该区域对应管道皮长的最终时间t4:
12、t4=t2*a+t1*b,其中,a为光纤权重因子,b为定标盒权重因子,a+b=1。
13、其中,本发明通过将定标盒和光纤传感跟踪系统的监测结果以上述公式进行实时综合计算,从而在某个同时具有分布式光纤设备与定标盒监控的地点,在清管器经过时,系统可以基于分布式光纤设备获取的振动时间及定标盒获取的信号时间,按照所述公式进行实时综合计算,从而可以获得清管器的系统综合计算经过时间,且此经过时间因为整合了两种信号的经过时间,那么相对于仅基于单一一种(分布式光纤设备或定标盒),更加准确可靠。
14、进一步的,所述第一待测区域包括:第一子待测区域和第二子待测区域,多组振动数据中清管器对应的振动信号数值均小于或等于第一阈值且大于第三阈值的管道皮长区域为第一子待测区域,多组振动数据中清管器对应的振动信号数值均小于或等于第三阈值的管道皮长区域为第二子待测区域;针对第一子待测区域,a=f*50%;b=1-f*50%;针对第二子待测区域,a=f*10%;b=1-f*10%;针对第二待测区域,a=f*30%;b=1-f*30%;其中,f为音频强度因子。
15、进一步的,音频强度因子的计算方式为:调用清管器振动经过时间处相关音频时域图信号,从音频时域图信号中提取清管器经过对应时间段上对应的信号最大值,计算该信号最大值与音频阈值之间的比值获得音频强度因子。
16、进一步的,本方法还可以对重点区域进行监测,所述方法还包括在管道皮长上设定重点监测区域,在重点监测区域中安装定标盒,基于定标盒采集获得的清管器经过重点监测区域的时间数据和光纤传感跟踪系统采集获得清管器经过重点监测区域的时间数据计算出清管器经过重点监测区域的最终时间。
17、进一步的,所述步骤3还包括对定标盒和光纤传感跟踪系统进行测试,测试合格后进行后续步骤。
18、进一步的,所述定标盒安装在管道弯头或三通对应位置,由于弯头和三通处容易卡球,因为在这些位置进行重点监测。
19、进一步的,为了对历史振动数据进行准确的发现,准确的发现现有光纤传感跟踪系统的盲区,本发明中振动时域图的绘制方式为:
20、采集清管过程中每秒在每米皮长下采集的振动数据,组成每秒在全皮长范围下的振动数据;
21、通过对每秒在全皮长范围下的振动数据进行滤波处理后,使用横坐标代表皮长纵坐标代表时间绘制出振动时域图。
22、步骤4中的清管器跟踪具体包括:
23、清管器进入第一待测区域前,对清管器的振动信号进行跟踪获得清管器的振动轨迹,根据清管器的振动轨迹结合振动时域图的模式识别模型对清管器的经过进行识别,获得识别结果,基于识别结果获得清管器最近一次经过第一待测区域的时间t2;
24、基于识别结果,判断清管器进入第一待测区域后,结合t2按照清管器当前速度计算下一个皮长点的预计时间,在预计时间前后,通过振动时域图进行复查,确认清管器是否通过,确认清管器通过后产生一条振动经过时间,并记录该皮长上部署的定标盒检测的经过时间获得时间t1;
25、基于t1和t2对清管器的实际经过时间进行核算;
26、模式识别模型用于识别清管器是否经过,模式识别模型的获得方式为:
27、获得数据:使用光纤传感模块捕获音频信号,将音频信号转换为振动时域图,以表示信号随时间的频率内容;
28、特征提取:从振动时域图中提取相关特征,以捕捉与清管器经过管道相关的特征,获得带有标签的训练集;
29、训练和模型开发:使用带有标签的训练集对模式识别模型进行训练获得模式识别模型。
30、本发明提供的一个或多个技术方案,至少具有如下技术效果或优点:
31、本发明在原有光纤传感跟踪清管器运行的基础上,在信号薄弱、高底噪区域、管线分离区域分别引入定标盒,并将定标盒的定标结果与光纤振动跟踪信号进行合理结合,以对清管跟踪定位进行修正,从而实现了全管线实时、无盲区跟踪,减少了清管跟踪沿线人员部署,提高了清管监控效率;实现了对清管器的实时、无盲区跟踪,针对即将出现卡球风险情况下,用户可及时调整参数,进一步避免卡球风险;实现了卡球后,对后续解卡过程进行全程监控,提高了解卡效率,可实时对解卡效果进行评判,以供解卡方案的实时决策,使得解卡效率提高;实现了全管线实时、无盲区跟踪可以对清管工艺参数的不断优化打下重要基础,用户通过对该管线的历史清管数据作为参考,结合相关清管气量、气压记录,从而灵活制定用于气高低峰时等不同时期的清管工艺参数。
- 还没有人留言评论。精彩留言会获得点赞!