噪声消除磁场测量方法及磁场测量系统与流程
本发明涉及信号探测领域,特别是涉及一种噪声消除磁场测量方法及磁场测量系统。
背景技术:
1、时间域瞬变电磁法(简称tdem)是一种利用不接地回线向地下发送脉冲式一次电磁场,用接收线圈观测该脉冲电磁场感应的地下涡流产生的二次电磁场,广泛运用于电磁勘探领域。超导瞬变电磁(superconducting transient electromagnetic,简称stem)是一种利用超导量子干涉器件(squid)替代接收线圈作为接收传感器的一种新型探测仪器。它结合了时间域瞬变电磁方法和超导传感器高灵敏的特性,具有探测深度大、频带宽、受地形限制小、分辨率高的特点。
2、但是在野外探测的环境中,由于我国国民经济的飞速发展,能源消耗增加,对电力的需求快速增长,电网建设设置较多导致了磁场探测不够精准。这是因为电力线周围存在大量的工频干扰信号,这些工频干扰信号通常以50hz频率以及谐波出现,会对stem数据的质量和解释造成干扰。
3、为了克服这一问题,目前有多种去除工频干扰的方法,但是均是在原始接收信号基础上直接利用滤波或者人工智能算法提取工频信号并去除工频。其中滤波法是最常用的去除工频噪声的方法之一,它基于频域滤波原理,通过设计滤波器来选择性地滤除50hz频率附近的干扰信号。常用的滤波器包括陷波、小波变换等,滤波法简单易行,但会导致信号失真和频谱畸变。人工智能去噪是近年来应用深度学习技术处理电磁干扰问题的一种新兴方法,它通过建立多层神经网络模型,可以从大量的数据中学习和提取噪声特征实现对干扰信号的去除,然而深度学习算法通常需要大量的标注数据来进行训练,但是获取大规模且具有代表性的50hz工频干扰数据是一项极大的挑战,无法获取工频干扰的准确特征。
4、基于此,现目前的磁场测量方法存在无法高效提取工频并消除工频干扰,同时高精度的stem系统无法在强干扰下准确检测等问题。
5、因此,本发明提供了一种噪声消除磁场测量方法及磁场测量系统用以解决现有的磁场检测中噪声特征识别不够准确同时消除噪声方法比较低效的问题。
6、应该注意,上面对技术背景的介绍只是为了方便对本技术的技术方案进行清楚、完整的说明,并方便本领域技术人员的理解而阐述的。不能仅仅因为这些方案在本技术的背景技术部分进行了阐述而认为上述技术方案为本领域技术人员所公知。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明的目的在于提供一种噪声消除磁场测量方法及磁场测量系统,用于解决现有技术中的磁场测量方法无法高效提取工频并消除工频干扰,同时无法在强干扰下准确检测等问题。
2、为实现上述目的及其他相关目的,本发明提供一种噪声消除磁场测量方法,包括:
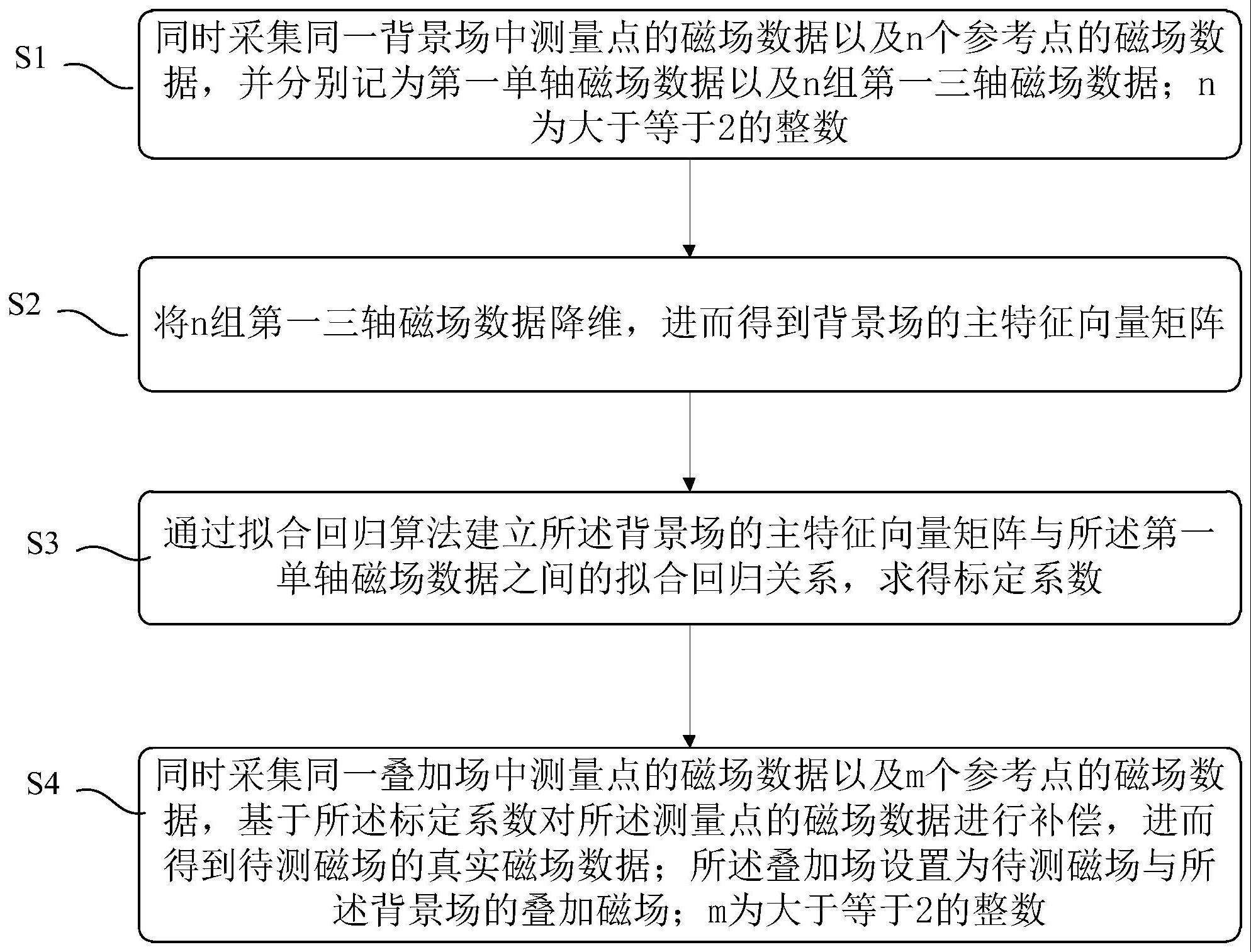
3、s1、同时采集同一背景场中测量点的磁场数据以及n个参考点的磁场数据,并分别记为第一单轴磁场数据以及n组第一三轴磁场数据;n为大于等于2的整数;
4、s2、将n组第一三轴磁场数据降维,进而得到背景场的主特征向量矩阵
5、s3、通过拟合回归算法建立所述背景场的主特征向量矩阵与所述第一单轴磁场数据之间的拟合回归关系,求得标定系数;
6、s4、同时采集同一叠加场中测量点的磁场数据以及m个参考点的磁场数据,基于所述标定系数k对所述测量点的磁场数据进行补偿,进而得到待测磁场的真实磁场数据;所述叠加场设置为待测磁场与所述背景场的叠加磁场;m为大于等于2的整数。
7、可选地,步骤s4包括:
8、s41、同时采集同一叠加场中测量点的磁场数据以及m个参考点的磁场数据,并分别记为第二单轴磁场数据以及m组第二三轴磁场数据;
9、s42、将m组第二三轴磁场数据降维,进而得到叠加场的主特征向量矩阵;
10、s43、通过拟合回归算法建立所述叠加场的主特征向量矩阵与所述第二单轴磁场数据之间的拟合回归关系,并将所述标定系数代入,进而得到所述待测磁场的真实磁场数据。
11、可选地,基于pca降维算法对各参考点的磁场数据进行降维,所述pca降维算法包括:
12、将各参考点的磁场数据组成原始特征矩阵;将所述原始特征矩阵进行标准化,得到标准特征矩阵;计算所述标准特征矩阵中任两个数的协方差得到协方差矩阵;基于所述协方差矩阵通过矩阵分解法得到若干特征值以及各特征值对应的特征向量;将特征值从大到小排序后选取第一特征值到第p特征值分别对应的特征向量作为主特征向量矩阵;p为大于等于1且小于参考点数量的整数。
13、可选地,所述标准特征矩阵满足:
14、
15、其中,r为所述原始特征矩阵;为所述原始特征矩阵的平均值;sr为所述原始特征矩阵的方差。
16、可选地,所述协方差矩阵满足:rcov=rnorm×rnormt;
17、其中,rcov为所述协方差矩阵;rnorm为所述原始特征矩阵;rnormt为所述原始特征矩阵的转置矩阵。
18、可选地,所述矩阵分解法为特征值分解法或svd矩阵分解法。
19、可选地,当步骤s2时,p取值满足:p≤0.9×n;当步骤s42时,p取值满足p≤0.9×m。
20、可选地,所述拟合回归算法设置为最小二乘法或最小梯度算法。
21、可选地,基于所述最小二乘法求解所述标定系数时,步骤s3中,所述标定系数k满足:
22、k=(utu)-1utbz;
23、其中,k为所述标定系数;u为所述背景场的主特征向量矩阵;ut为所述背景场的主特征向量矩阵的转置矩阵;bz为所述测量点的第一单轴磁场数据。
24、可选地,基于所述最小二乘法得到所述待测磁场的真实磁场数据时,步骤s4中,所述待测磁场的真实磁场数据bz’满足:
25、b′z=bz-ku;
26、其中,bz’为所述待测磁场的真实磁场数据;bz为所述测量点的第二单轴磁场数据;k为所述标定系数;u为所述叠加场的主特征向量矩阵。
27、本发明还提供一种磁场测量系统,用于实现上述的噪声消除磁场测量方法,包括参考点测量模块、磁场探测器模块以及计算模块;
28、所述参考点测量模块的输出端连接所述计算模块,用于测量各参考点的磁场信号并为所述计算模块提供n组第一三轴磁场数据以及m组第二三轴磁场数据;
29、所述磁场探测模块的输出端连接所述计算模块,用于测量测量点的磁场信号并为所述计算模块提供所述第一单轴磁场数据以及所述第二单轴磁场数据;
30、所述计算单元基于所述参考点测量模块的输出信号以及所述磁场探测器模块的输出信号构建拟合回归关系并求得标定系数,并基于所述标定系数对第二单轴磁场数据进行补偿,输出待测磁场的真实磁场数据。
31、可选地,所述参考点测量模块包含l个参考磁场传感器,l为大于等于2的整数。
32、可选地,所述磁场探测模块包括控制单元、脉冲磁场发生器以及磁场传感器;
33、所述控制单元为所述脉冲磁场发生器以及所述磁场传感器提供控制信号;
34、所述脉冲磁场发生器用于产生脉冲磁场;
35、所述磁场传感器连接所述计算单元,基于控制单元分别测量背景场下的第一单轴磁场数据或叠加场下的第二单轴磁场数据并提供给所述计算单元;所述叠加场设置为基于所述脉冲磁场感应得到的待测磁场以及所述背景场的叠加磁场。
36、可选地,所述磁场传感器设置为超导量子干涉磁场传感器。
37、可选地,所述计算单元包括pca降维单元、拟合回归关系构建单元、标定系数存储单元以及噪声补偿单元;
38、所述pca降维单元的输入端连接所述参考点测量模块,用于将n组第一三轴磁场数据以及m组第二三轴磁场数据分别降维并得到对应的背景场的主特征向量矩阵以及叠加场的主特征向量矩阵
39、所述拟合回归关系构建单元连接所述pca降维单元及所述磁场探测器模块的输出端,分别构建背景场的主特征向量矩阵与所述第一单轴磁场数据之间的拟合回归关系,以及叠加场的主特征向量矩阵与所述第二单轴磁场数据之间的拟合回归关系;
40、所述标定系数存储单元连接所述拟合回归关系构建单元的输出端,用于得到标定系数;
41、所述噪声补偿单元连接所述拟合回归关系构建单元及所述标定系数存储单元的输出端,基于所述标定系数对所述第二单轴磁场数据进行补偿,最终得到待测磁场的真实磁场数据。
42、如上所述,本发明的噪声消除磁场测量方法及磁场测量系统,具有以下有益效果:
43、1、本发明的噪声消除磁场测量方法通过设置不同位置的参考点直接测量背景场(如:电力线)的磁场信号并通过pca算法提取磁场噪声的有效特征,再基于最小二乘算法得到背景场磁场信号以及测量场磁场信号之间的拟合回归关系,进而基于该拟合回归关系可以有效地去除待测磁场信号中的背景场噪声,提高信号的质量和可靠性。
44、2、本发明的磁场测量系统通过使用多通道进行信号采集,可以捕捉更多的背景磁场信息,能进一步提高精度,得到更准确的真实磁场信号。
45、3、本发明的噪声消除磁场测量方法简便,本发明的磁场测量系统结构简单,能较好的在磁场信号测量领域进行推广应用。
- 还没有人留言评论。精彩留言会获得点赞!