基于BDS的多源融合定位方法及相关设备
本技术涉及计算机,尤其涉及一种基于bds的多源融合定位方法及相关设备。
背景技术:
1、随着导航与定位服务的兴起,在有遮挡以及信号衰减和断续的复杂城市环境中也存在越来越多的导航定位需求。此外,随着我国北斗卫星导航系统(beidou navigationsatellite system,bds)的产业化推广和汽车工业的迅速发展,车载导航的需求在导航与位置服务产业的市场占据了重要的地位。结合北斗卫星导航系统的车联网导航定位算法可以更好的实现车辆定位。
2、现有技术中惯性导航系统(ins,inertial navigation system)由于具有动态响应特性好、短时精度高、全自主工作能力强、隐蔽性好以及不对外辐射电磁信号等特点而被广泛应用于导航领域,但惯性导航系统利用积分实现航位推算的过程中,误差会随时间累积。而全球导航卫星系统(gnss,global navigation satellite system)又存在受地形地物遮挡,导致室内定位精度降低的缺点。而蓝牙或wi-fi在室内场景广泛应用,且定位效果好。因此,如何基于bds实现室内外组合导航定位是亟待解决的问题。
技术实现思路
1、有鉴于此,本技术的目的在于提出一种基于bds的多源融合定位方法及相关设备,以解决基于bds实现室内外组合导航定位的问题。
2、基于上述目的,本技术提供了一种基于bds的多源融合定位方法,包括:
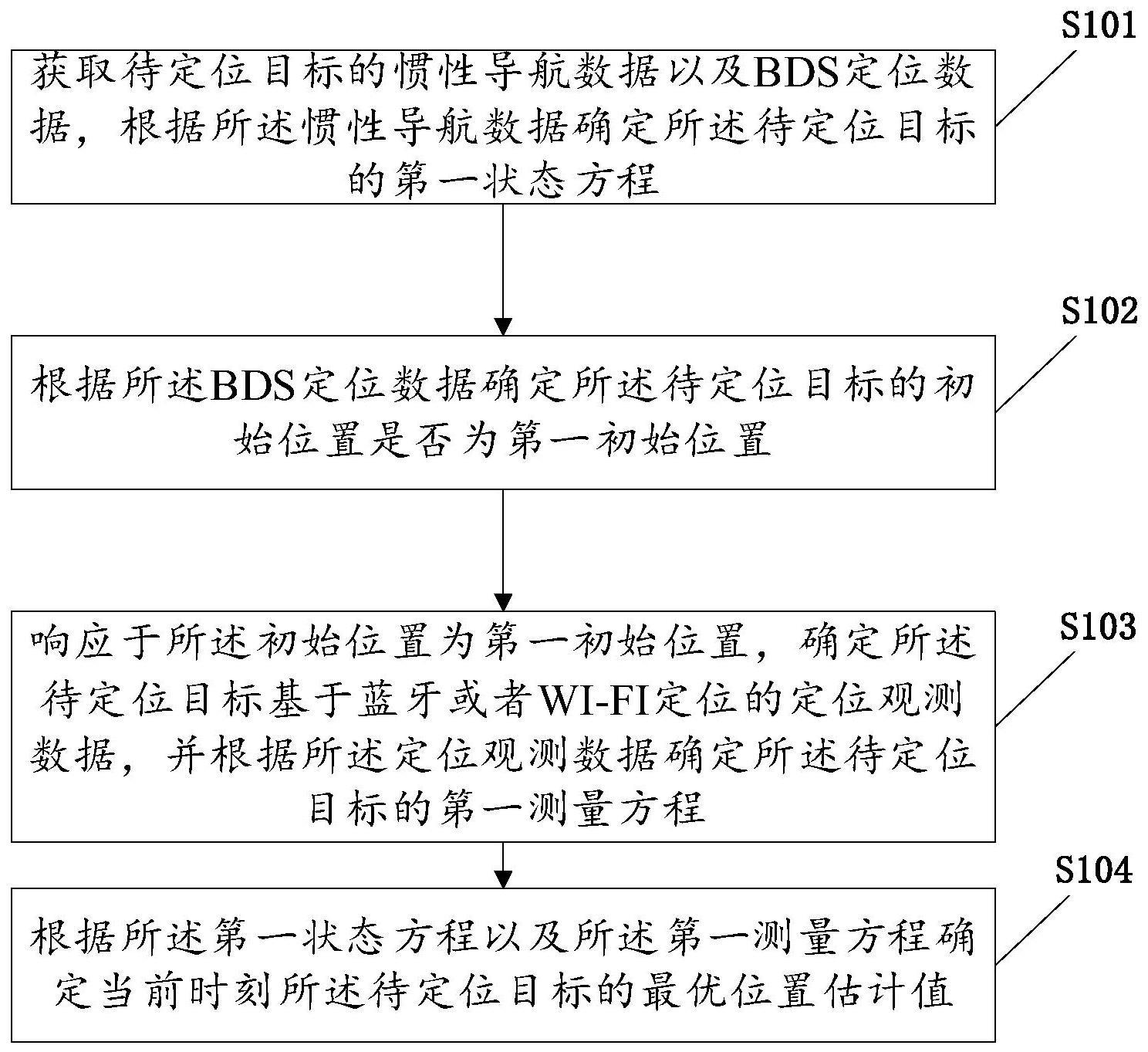
3、获取待定位目标的惯性导航数据以及bds定位数据,根据所述惯性导航数据确定所述待定位目标的第一状态方程;
4、根据所述bds定位数据确定所述待定位目标的初始位置是否为第一初始位置;
5、响应于所述初始位置为第一初始位置,确定所述待定位目标基于蓝牙或者wi-fi定位的定位观测数据,并根据所述定位观测数据确定所述待定位目标的第一测量方程;
6、根据所述第一状态方程以及所述第一测量方程确定当前时刻所述待定位目标的最优位置估计值。
7、在一种可能的实现方式中,所述方法还包括:
8、响应于所述初始位置不是第一初始位置,确定所述待定位目标的初始位置是否为第二初始位置;
9、响应于所述初始位置为第二初始位置,根据所述bds定位数据确定所述待定位目标的第二测量方程;
10、根据所述第一状态方程以及所述第二测量方程确定所述待定位目标当前时刻的最优位置估计值。
11、在一种可能的实现方式中,所述惯性导航数据包括:所述待定位目标的加速度和角速度;
12、所述根据所述惯性导航数据确定所述待定位目标的第一状态方程,包括:
13、根据所述加速度、所述角速度以及所述惯性导航的误差方程确定所述第一状态方程:
14、
15、
16、
17、其中,eq为惯性导航的误差方程,为第一状态方程,δv为速度误差,rt为旋转矩阵,at为加速度,ba(t)为加速度计零偏,δθ为失准角误差,na为加速度计的白噪声,δba为加速度计的零偏误差,wt为角速度值,bw(t)为陀螺仪零偏,nb(a)为加速度计的随机游走对应的白噪声,nw为陀螺仪的白噪声,δbw为陀螺仪的零偏误差,nb(w)为陀螺仪的随机游走对应的白噪声,ft为状态转移矩阵,bt为控制矩阵。
18、在一种可能的实现方式中,所述根据所述bds定位数据确定所述待定位目标的初始位置是否为第一初始位置,包括:
19、根据所述bds定位数据确定所述待定位目标接收到bds信号的接收强度;
20、响应于所述接收强度小于预设接收强度,确定所述待定位目标的初始位置为第一初始位置。
21、在一种可能的实现方式中,所述响应于所述初始位置不是第一初始位置,确定所述待定位目标的初始位置是否为第二初始位置,包括:
22、响应于所述接收强度大于预设接收强度,确定所述待定位目标的初始位置为第二初始位置。
23、在一种可能的实现方式中,所述定位观测数据包括基于蓝牙或者wi-fi定位确定的所述待定位目标的观测位置和观测速度;
24、所述根据所述定位观测数据确定所述待定位目标的第一测量方程,包括:
25、根据所述观测位置确定位置测量方程:
26、δp=pi-pw=hpx+wp
27、其中,δp为惯性导航系统与蓝牙或者wi-fi定位之间的位置误差,pi为惯性导航系统针对所述待定位目标的预测位置,pw为基于蓝牙或者wi-fi定位确定的所述待定位目标的观测位置,hp为位置观测矩阵,wp为位置观测噪声;
28、根据所述观测速度确定速度测量方程:
29、δv=vi-vw=hvx+wv
30、其中,δv为惯性导航系统与蓝牙或者wi-fi定位之间的速度误差,vi为惯性导航系统针对所述待定位目标的的预测速度,vw为蓝牙或者wi-fi定位针对所述待定位目标的测量速度,hv为速度观测矩阵,wv为速度观测噪声;
31、根据所述位置测量方程以及所述速度测量方程确定所述第一测量方程:
32、
33、在一种可能的实现方式中,所述根据所述第一状态方程以及所述第一测量方程确定当前时刻所述待定位目标的最优位置估计值,包括:
34、获取当前时刻所述待定位目标的实时惯性导航数据以及当前时刻所述待定位目标基于蓝牙或者wi-fi定位的实时定位观测数据;
35、根据所述实时惯性导航数据以及所述第一状态方程确定当前时刻所述待定位目标的状态误差;
36、根据所述状态误差、所述实时定位观测数据以及所述第一测量方程确定当前时刻所述待定位目标的最优位置估计值。
37、基于同样的目的,本技术还提出了一种基于bds的多源融合定位装置,包括:
38、获取模块,被配置为获取待定位目标的惯性导航数据以及bds定位数据,根据所述惯性导航数据确定所述待定位目标的第一状态方程;
39、定位模块,被配置为根据所述bds定位数据确定所述待定位目标的初始位置是否为第一初始位置;
40、响应模块,被配置为响应于所述初始位置为第一初始位置,确定所述待定位目标基于蓝牙或者wi-fi定位的定位观测数据,并根据所述定位观测数据确定所述待定位目标的第一测量方程;
41、预测模块,被配置为根据所述第一状态方程以及所述第一测量方程确定当前时刻所述待定位目标的最优位置估计值。
42、基于上述目的,本技术还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任意一项所述的方法。
43、基于上述目的,本技术还提供了一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储计算机指令,所述计算机指令用于使所述计算机执行上述任意一项所述的方法。
44、从上面所述可以看出,本技术提供的基于bds的多源融合定位方法及相关设备,首先获取待定位目标的惯性导航数据以及bds定位数据,根据惯性导航数据确定待定位目标的第一状态方程,进一步地,根据bds定位数据确定待定位目标的初始位置是否为第一初始位置,若初始位置为第一初始位置,进一步确定待定位目标基于蓝牙或者wi-fi定位的定位观测数据,并根据定位观测数据确定待定位目标的第一测量方程,最后根据第一状态方程以及第一测量方程确定当前时刻待定位目标的最优位置估计值。本技术能够利用惯性导航系统与全球导航卫星系统进行融合定位,实现组合导航,不仅克服了惯导系统的误差长期积累的缺点,而且在全球导航卫星系统信号受到遮挡时,利用基于蓝牙或者wi-fi定位的组合导航系统在室内场景广泛应用的特点来提供准确的位置信息,实现室内室外高精度的导航定位算法,提高了定位系统的精度和用户体验。
- 还没有人留言评论。精彩留言会获得点赞!