基于仿生偏振视觉的雾天场景相对运动估计方法和装置
本技术涉及仿生导航定位领域,特别是涉及一种基于仿生偏振视觉的雾天场景相对运动估计方法和装置。
背景技术:
1、目前无人平台运动估计技术研究取得了大量的研究成果,已经能够实现部分移动机器人、无人平台等在卫星拒止条件下的自主定位,但是在雨雾尘等复杂天气条件下传统的无人平台视觉方案极易失效,导致探测距离、成像效果、测量精度等受到极大限制,从而严重影响无人系统装备关键参数获取,从而导致定位任务失败。
2、近年来,国内外众多学者对于雨雾尘等复杂天气条件下场景相对深度的估计问题做了大量的工作,提出了旋转测量法、多视角观测方法等方法,以期解决雨雾尘天气所导致的成像效率与成像质量问题,提高无人平台在复杂天气条件下的运动估计精度与鲁棒性。目前在复杂环境下运动估计问题依赖于人工经验,同时在偏振散射模型的基础上衍生的运动估计方法在求解透射率函数t以及无穷远处大气光等关键问题上研究不足,现有技术存在效果不佳的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高无人平台在复杂天气条件下的定位精度的基于仿生偏振视觉的雾天场景相对运动估计方法、装置、计算机设备和存储介质。
2、一种基于仿生偏振视觉的雾天场景相对运动估计方法,所述方法包括:
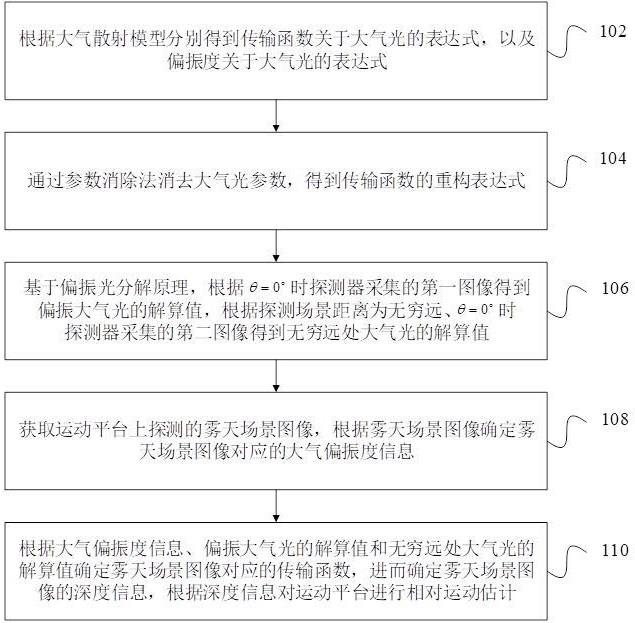
3、根据大气散射模型分别得到传输函数关于大气光的表达式,以及偏振度关于大气光的表达式;所述传输函数中包括探测场景的深度信息;
4、通过参数消除法消去大气光参数,得到传输函数的重构表达式;所述传输函数的重构表达式中包括大气偏振度、偏振大气光和无穷远处大气光三个自变量;
5、基于偏振光分解原理,根据时探测器采集的第一图像得到所述偏振大气光的解算值,根据探测场景距离为无穷远、时探测器采集的第二图像得到所述无穷远处大气光的解算值;其中,为探测器偏振敏感单元的主敏感方向与传感器的参考方向所呈的角度;
6、获取运动平台上探测的雾天场景图像,根据所述雾天场景图像确定所述雾天场景图像对应的大气偏振度信息;
7、根据所述大气偏振度信息、所述偏振大气光的解算值和所述无穷远处大气光的解算值确定所述雾天场景图像对应的传输函数,进而确定所述雾天场景图像的深度信息,根据所述深度信息对所述运动平台进行相对运动估计。
8、在其中一个实施例中,还包括:根据大气散射模型得到传输函数关于大气光的表达式为:
9、;
10、其中,为传输函数,,为散射系数,为探测场景的深度信息,为大气光,为无穷远处大气光;
11、根据大气散射模型得到偏振度关于大气光的表达式为:
12、;
13、其中,为大气偏振度,为同一场景下最亮的图像,为同一场景下最暗的图像。
14、在其中一个实施例中,还包括:通过参数消除法消去大气光参数,得到传输函数的重构表达式为:
15、;
16、其中,为偏振大气光。
17、在其中一个实施例中,还包括:基于偏振光分解原理,根据时探测器采集的第一图像得到所述偏振大气光的解算值;所述偏振大气光的解算公式为:
18、;
19、其中,为时探测器采集的第一图像对应的图像光强,为斯托克斯参数中的总光强,为所述第一图像的偏振角值,为所述第一图像的偏振度。
20、在其中一个实施例中,还包括:根据探测场景距离为无穷远、时探测器采集的第二图像得到所述无穷远处大气光的解算值;所述无穷远处大气光的解算公式为:
21、;
22、其中,为探测场景距离为无穷远、时探测器采集的第二图像对应的图像光强,为斯托克斯参数中的总光强,为所述第二图像的偏振角值,为所述第二图像对应的大气偏振度。
23、在其中一个实施例中,还包括:根据所述雾天场景图像通过非线性最小二乘法确定所述雾天场景图像对应的大气偏振度信息。
24、在其中一个实施例中,还包括:根据所述大气偏振度信息、所述偏振大气光的解算值和所述无穷远处大气光的解算值确定所述雾天场景图像对应的传输函数;
25、根据所述传输函数确定所述雾天场景图像的深度信息为:
26、。
27、一种基于仿生偏振视觉的雾天场景相对运动估计装置,所述装置包括:
28、传输函数重构模块,用于根据大气散射模型分别得到传输函数关于大气光的表达式,以及偏振度关于大气光的表达式;所述传输函数中包括探测场景的深度信息;通过参数消除法消去大气光参数,得到传输函数的重构表达式;所述传输函数的重构表达式中包括大气偏振度、偏振大气光和无穷远处大气光三个自变量;
29、关键参数解算模块,用于基于偏振光分解原理,根据时探测器采集的第一图像得到所述偏振大气光的解算值,根据探测场景距离为无穷远、时探测器采集的第二图像得到所述无穷远处大气光的解算值;其中,为探测器偏振敏感单元的主敏感方向与传感器的参考方向所呈的角度;
30、偏振度信息确定模块,用于获取运动平台上探测的雾天场景图像,根据所述雾天场景图像确定所述雾天场景图像对应的大气偏振度信息;
31、深度信息获取模块,用于根据所述大气偏振度信息、所述偏振大气光的解算值和所述无穷远处大气光的解算值确定所述雾天场景图像对应的传输函数,进而确定所述雾天场景图像的深度信息,根据所述深度信息对所述运动平台进行相对运动估计。
32、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
33、根据大气散射模型分别得到传输函数关于大气光的表达式,以及偏振度关于大气光的表达式;所述传输函数中包括探测场景的深度信息;
34、通过参数消除法消去大气光参数,得到传输函数的重构表达式;所述传输函数的重构表达式中包括大气偏振度、偏振大气光和无穷远处大气光三个自变量;
35、基于偏振光分解原理,根据时探测器采集的第一图像得到所述偏振大气光的解算值,根据探测场景距离为无穷远、时探测器采集的第二图像得到所述无穷远处大气光的解算值;其中,为探测器偏振敏感单元的主敏感方向与传感器的参考方向所呈的角度;
36、获取运动平台上探测的雾天场景图像,根据所述雾天场景图像确定所述雾天场景图像对应的大气偏振度信息;
37、根据所述大气偏振度信息、所述偏振大气光的解算值和所述无穷远处大气光的解算值确定所述雾天场景图像对应的传输函数,进而确定所述雾天场景图像的深度信息,根据所述深度信息对所述运动平台进行相对运动估计。
38、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
39、根据大气散射模型分别得到传输函数关于大气光的表达式,以及偏振度关于大气光的表达式;所述传输函数中包括探测场景的深度信息;
40、通过参数消除法消去大气光参数,得到传输函数的重构表达式;所述传输函数的重构表达式中包括大气偏振度、偏振大气光和无穷远处大气光三个自变量;
41、基于偏振光分解原理,根据时探测器采集的第一图像得到所述偏振大气光的解算值,根据探测场景距离为无穷远、时探测器采集的第二图像得到所述无穷远处大气光的解算值;其中,为探测器偏振敏感单元的主敏感方向与传感器的参考方向所呈的角度;
42、获取运动平台上探测的雾天场景图像,根据所述雾天场景图像确定所述雾天场景图像对应的大气偏振度信息;
43、根据所述大气偏振度信息、所述偏振大气光的解算值和所述无穷远处大气光的解算值确定所述雾天场景图像对应的传输函数,进而确定所述雾天场景图像的深度信息,根据所述深度信息对所述运动平台进行相对运动估计。
44、上述基于仿生偏振视觉的雾天场景相对运动估计方法、装置、计算机设备和存储介质,从大气散射模型出发建立偏振度与传输函数之间的转换关系,重构传输函数,其中,传输函数中蕴含场景相对深度信息。为通过传输函数得到场景的深度信息,本发明从偏振光的分解角度,得到了传输函数模型中无穷远处大气光和偏振大气光等关键自变量参数的解算公式,将0°时采集的图像作为已知信息可以估算偏振大气光信息,将探测距离为无穷远时0°采集的图像作为已知信息可以估算无穷远处大气光信息,再根据待探测图像计算偏振图像对应的大气偏振度信息,根据偏振大气光信息、无穷远处大气光信息和偏振图像对应的大气偏振度信息实现探测场景深度信息的估算。本发明具有原理简单、适用于不同天气等优点,对于提高复杂天气下仿生偏振光导航定位的鲁棒性和全天候适应性具有广阔的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!