一种基于毫米波雷达实现活跃度判断的方法及系统与流程
本发明属于毫米波雷达,具体涉及一种基于毫米波雷达实现活跃度判断的方法及系统。
背景技术:
1、24g毫米波雷达是工作在毫米波波段(millimeter wave)探测的雷达。具有波长短、频带宽(频率范围大),穿透能力强的特点,这些特点形成了毫米波雷达的优势。在24g毫米波雷达相关的产品中,有常供电设备、电池供电两种的应用场景。其中电池类设备通过间隔一定休眠周期后,让雷达传感器进行一次检测,检测结束后立即关机,以此来实现低功耗应用。
2、其中电池供电时的低功耗工作模式如图1所示:监控pir触发唤醒,在pir触发唤醒后,关闭pir触发,使能并重新配置雷达参数,接收并处理雷达数据,判断有人无人状态,若有人则进入低功耗,开启10秒唤醒定时器,定时器唤醒,关闭定时器,使能并重新配置雷达参数,来重新接收并处理雷达数据后,再判断有人无人状态,若判断有人无人状态的结果为无人,则在仅一次判断结果为无人时,进入低功耗,开启4秒唤醒定时器,在定时器唤醒后,关闭定时器,使能并重新配置雷达参数,以接收并处理雷达数据,再根据该雷达数据重新判断有人无人状态,在判断结果两次均为无人状态时,才上报无人状态,并在上报无人状态后,开启pir触发,进入低功耗模式,在低功耗模式下继续监测pir触发唤醒。现有技术的毫米波雷达在电池供电时的低功耗工作模式,为了满足低功耗的需求,电池类设备通过间隔一定休眠周期后,让雷达传感器进行一次检测,因此在雷达传感器的检测过程中,雷达检测的间隔周期较长,并且基于此间隔周期较长的有人无人状态判断的方式,也仅能实现较为准确的有人无人状态的判断,并不能对当前环境的活跃状态进行判断。
技术实现思路
1、本发明的目的在于提供一种基于毫米波雷达实现活跃度判断的方法及系统,用以解决现有技术的毫米波雷达在电池供电时的低功耗工作模式仅能单一的实现有人无人状态的检测,而不能对当前环境的活跃状态进行判断的问题。
2、为解决上述技术问题,本发明提供了一种基于毫米波雷达实现活跃度判断的方法,包括如下步骤:
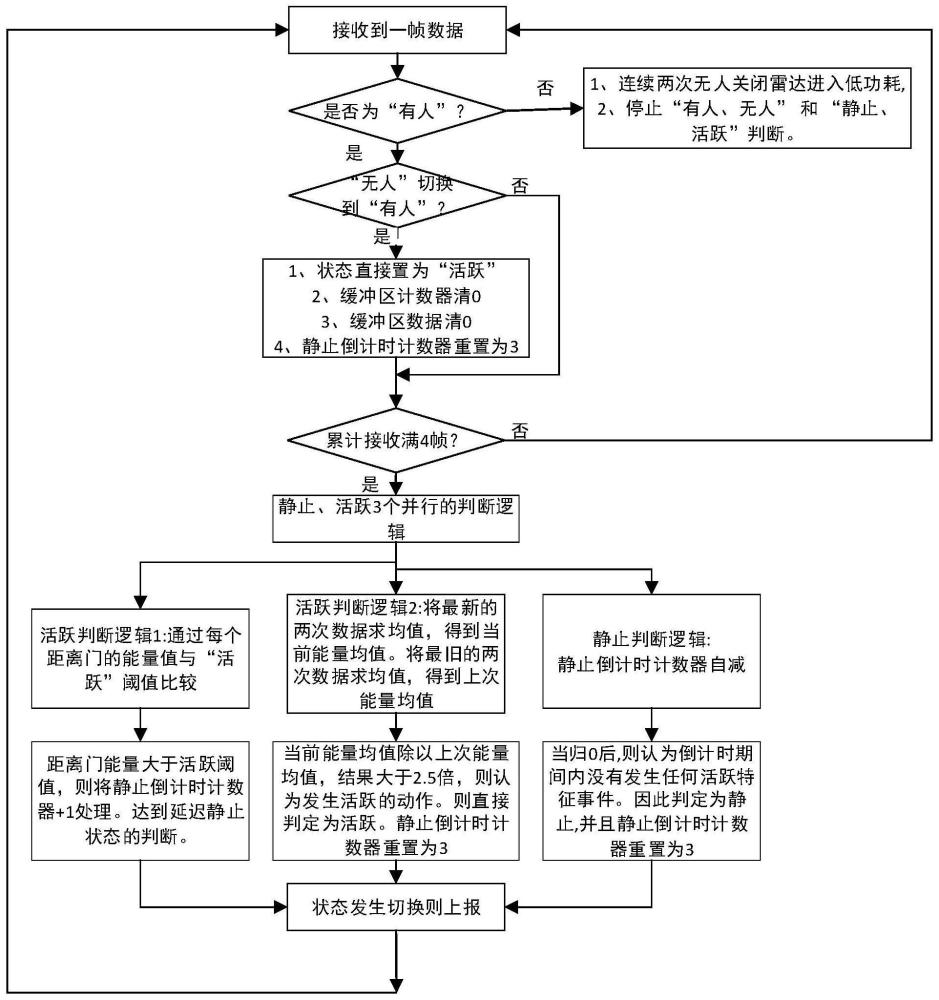
3、1)当接收到毫米波雷达的数据时,获取此时有人无人状态;
4、2)当此时为有人状态时,则根据毫米波雷达的距离门能量值进行活跃度判断;所述活跃度判断包括:当距离门能量值高于预设的活跃阈值时,此时的活跃度判断结果为活跃状态;当在设定的持续时间内距离门能量值均不超过预设的活跃阈值时,此时的活跃度判断结果为静止状态。
5、其有益效果为:本发明的方法发现当目标在对应距离门的范围内静坐或看书等没有发生大幅度肢体动作时,对应的距离门能量会逐渐衰减,直至低于活跃阈值,而当目标在对应距离门位置走动等发生幅度较大的肢体动作时,对应的距离门能量会逐渐增强,直至高于活跃阈值,因此本发明通过利用距离门能量值能够实现“静止或活跃”状态的判断,具体的在距离门能量值高于预设的活跃阈值时即直接判断此时为活跃状态,而在距离门能量值不超过预设的活跃阈值时并不是直接判断此时为静止状态,而是当此不超过设定的活跃阈值的情况在设定的持续时间内均不超过预设的活跃阈值时,才确定当前的状态为静止状态。因此本发明的方法通过利用距离门能量值的变化进行静止、活跃判断能够补足无法进行活跃检测缺陷。
6、进一步地,步骤2)中,当此时为有人状态且上一次接收到毫米波雷达数据时,获取的有人无人状态为无人状态时,先将此时状态置为活跃状态,并将静止倒计时计数器设置为设定时间后,再根据毫米波雷达的距离门能量值进行活跃度判断,并在静止倒计时计数器归零时,活跃度判断结果为静止状态。
7、因无人状态转变为有人状态的情况为活跃度突变的情况,因此本发明通过在无人状态转变为有人状态时直接将此时的状态置为活跃状态,以实现快速得到状态结果的过程,并且在此情况下还将静止倒计时计数器设置为设定时间后,再根据毫米波雷达的距离门能量值进行活跃度判断,此过程是基于在无人状态转变为有人状态下,通常活跃状态会持续一段时间,因此设置静止倒计时计数器时间,并在此时间内继续基于毫米波雷达的距离门能量值将进行活跃度的判断,而本发明的判断过程是基于距离门能量值高于预设的活跃阈值时即直接判断此时为活跃状态,而在距离门能量值不超过预设的活跃阈值时并不是直接判断此时为静止状态,而是当此不超过设定的活跃阈值的情况在设定的持续时间内均不超过预设的活跃阈值时,才确定当前的状态为静止状态,因此在距离门能量值高于预设的活跃阈值时直接得出活跃度判断结果为活跃状态,此时并不受静止倒计时计数器归零的影响,而在通过在静止倒计时计数器归零时,活跃度判断结果为静止状态的方式,保证当此不超过设定的活跃阈值的情况在设定的持续时间内均不超过预设的活跃阈值时,才确定当前的状态为静止状态。
8、进一步地,步骤2)中,当距离门能量值高于预设的活跃度阈值时,通过增加静止倒计时计数器的计数时间的方式,使此时的活跃度判断结果为活跃状态。
9、因在静止倒计时计数器归零时,活跃度判断结果为静止状态,所以在活跃状态时,仅需通过增加静止倒计时计数器的计数时间的方式,即可维持活跃状态。
10、进一步地,步骤2)中,当此时为有人状态且接收到毫米波雷达的数据次数达到设定量时,所述活跃度判断还包括:当最新设定次数内接收到的数据中距离门能量值与上一设定次数内接收到的数据的距离门能量值的比值大于设定值时,此时的活跃度判断结果为活跃状态。
11、本发明考虑到针对低功耗模式数据本身的采集频率较慢,为了加速活跃状态的捕获,本发明中通过能量值的突变来快速判断“静止”、“活跃”状态。即通过当前能量值相比上次能量值,若发生能量值升高的突变情况则认为发生了活跃的动作,直接判定为活跃状态。例如若设定量为2时,则最新设定次数内接收到的数据中距离门能量值可以为最近1次接收到的距离门能量值,上一设定次数内接收到的数据的距离门能量值可以为2次中的前1次接收到的距离门能量值;还如在设定量为4时,最新设定次数内接收到的数据中距离门能量值可以为最近两次接收到的距离门能量值的平均值(或其中任一值),上一设定次数内接收到的数据的距离门能量值可以为四次中的前两次接收到的距离门能量值的平均值(或其中任一值)。
12、进一步地,步骤2)中,当最新时间段接收到的数据的距离门能量值与上一时间段接收到的数据的距离门能量值的比值大于设定值时,通过将静止倒计时计数器的计数时间设置为设定时间的方式,使此时的活跃度判断结果为活跃状态。
13、本发明考虑到突变的情况下,距离门能量值高于活跃阈值的时间较长,因此通过在活跃度突变为活跃状态的情况下,不论静止倒计时计数器还剩余多少时间的倒计时,都将此静止倒计时计数器的计数时间设置为设定时间,以保证此时间内的活跃度判断结果为活跃状态。
14、为解决上述技术问题,本发明还提供了一种基于毫米波雷达实现活跃度判断的系统,包括毫米波雷达,还包括用于获取毫米波雷达的距离门能量值的检测距离门,还包括存储器以及处理器,所述处理器用于执行指令以实现如下步骤:
15、1)当接收到毫米波雷达的数据时,获取此时有人无人状态;
16、2)当此时为有人状态时,则根据毫米波雷达的距离门能量值进行活跃度判断;所述活跃度判断包括:当距离门能量值高于预设的活跃阈值时,此时的活跃度判断结果为活跃状态;当在设定的持续时间内距离门能量值均不超过预设的活跃阈值时,此时的活跃度判断结果为静止状态。
17、其有益效果为:本发明发现当目标在对应距离门的范围内静坐或看书等没有发生大幅度肢体动作时,对应的距离门能量会逐渐衰减,直至低于活跃阈值,而当目标在对应距离门位置走动等发生幅度较大的肢体动作时,对应的距离门能量会逐渐增强,直至高于活跃阈值,因此本发明通过利用距离门能量值能够实现“静止或活跃”状态的判断,具体的在距离门能量值高于预设的活跃阈值时即直接判断此时为活跃状态,而在距离门能量值不超过预设的活跃阈值时并不是直接判断此时为静止状态,而是当此不超过设定的活跃阈值的情况在设定的持续时间内均不超过预设的活跃阈值时,才确定当前的状态为静止状态。因此本发明通过利用距离门能量值的变化进行静止、活跃判断能够补足无法进行活跃检测缺陷。
18、进一步地,步骤2)中,当此时为有人状态且上一次接收到毫米波雷达数据时,获取的有人无人状态为无人状态时,先将此时状态置为活跃状态,并将静止倒计时计数器设置为设定时间后,再根据毫米波雷达的距离门能量值进行活跃度判断,并在静止倒计时计数器归零时,活跃度判断结果为静止状态。
19、因无人状态转变为有人状态的情况为活跃度突变的情况,因此本发明通过在无人状态转变为有人状态时直接将此时的状态置为活跃状态,以实现快速得到状态结果的过程,并且在此情况下还将静止倒计时计数器设置为设定时间后,再根据毫米波雷达的距离门能量值进行活跃度判断,此过程是基于在无人状态转变为有人状态下,通常活跃状态会持续一段时间,因此设置静止倒计时计数器时间,并在此时间内继续基于毫米波雷达的距离门能量值将进行活跃度的判断,而本发明的判断过程是基于距离门能量值高于预设的活跃阈值时即直接判断此时为活跃状态,而在距离门能量值不超过预设的活跃阈值时并不是直接判断此时为静止状态,而是当此不超过设定的活跃阈值的情况在设定的持续时间内均不超过预设的活跃阈值时,才确定当前的状态为静止状态,因此在距离门能量值高于预设的活跃阈值时直接得出活跃度判断结果为活跃状态,此时并不受静止倒计时计数器归零的影响,而在通过在静止倒计时计数器归零时,活跃度判断结果为静止状态的方式,保证当此不超过设定的活跃阈值的情况在设定的持续时间内均不超过预设的活跃阈值时,才确定当前的状态为静止状态。
20、进一步地,步骤2)中,当距离门能量值高于预设的活跃度阈值时,通过增加静止倒计时计数器的计数时间的方式,使此时的活跃度判断结果为活跃状态。
21、因在静止倒计时计数器归零时,活跃度判断结果为静止状态,所以在活跃状态时,仅需通过增加静止倒计时计数器的计数时间的方式,即可维持活跃状态。
22、进一步地,步骤2)中,当此时为有人状态且接收到毫米波雷达的数据次数达到设定量时,所述活跃度判断还包括:当最新设定次数内接收到的数据中距离门能量值与上一设定次数内接收到的数据的距离门能量值的比值大于设定值时,此时的活跃度判断结果为活跃状态。
23、本发明考虑到针对低功耗模式数据本身的采集频率较慢,为了加速活跃状态的捕获,本发明中通过能量值的突变来快速判断“静止”、“活跃”状态。即通过当前能量值相比上次能量值,若发生能量值升高的突变情况则认为发生了活跃的动作,直接判定为活跃状态。例如若设定量为2时,则最新设定次数内接收到的数据中距离门能量值可以为最近1次接收到的距离门能量值,上一设定次数内接收到的数据的距离门能量值可以为2次中的前1次接收到的距离门能量值;还如在设定量为4时,最新设定次数内接收到的数据中距离门能量值可以为最近两次接收到的距离门能量值的平均值(或其中任一值),上一设定次数内接收到的数据的距离门能量值可以为四次中的前两次接收到的距离门能量值的平均值(或其中任一值)。
24、进一步地,步骤2)中,当最新时间段接收到的数据的距离门能量值与上一时间段接收到的数据的距离门能量值的比值大于设定值时,通过将静止倒计时计数器的计数时间设置为设定时间的方式,使此时的活跃度判断结果为活跃状态。
25、本发明考虑到突变的情况下,距离门能量值高于活跃阈值的时间较长,因此通过在活跃度突变为活跃状态的情况下,不论静止倒计时计数器还剩余多少时间的倒计时,都将此静止倒计时计数器的计数时间设置为设定时间,以保证此时间内的活跃度判断结果为活跃状态。
- 还没有人留言评论。精彩留言会获得点赞!