一种智能取样方法、系统及存储介质与流程
本发明属于取样设备,具体地说涉及一种智能取样方法、系统及存储介质。
背景技术:
1、在对运粮设备(如运粮车、船、火车)中的粮食进行取样前,需要对运粮设备进行测量,以确定取样区域。但是现有的测量方式大多是通过扫描设备对运粮设备进行整体扫描,这种方式需要花费较多的扫描和计算时间,造成待取样的运粮车排队时间较长,由于取样场地有限,易进一步造成场地拥堵,导致整体取样效率低。另外,现有的取样场地大多未实现无人化管理,因此经常会发生有人将其他车辆停放至取样场地的情况,妨碍了取样工作的正常进行,严重影响了测量及取样效率。
技术实现思路
1、针对上述问题,本发明设计了一种智能取样方法,包括以下步骤:
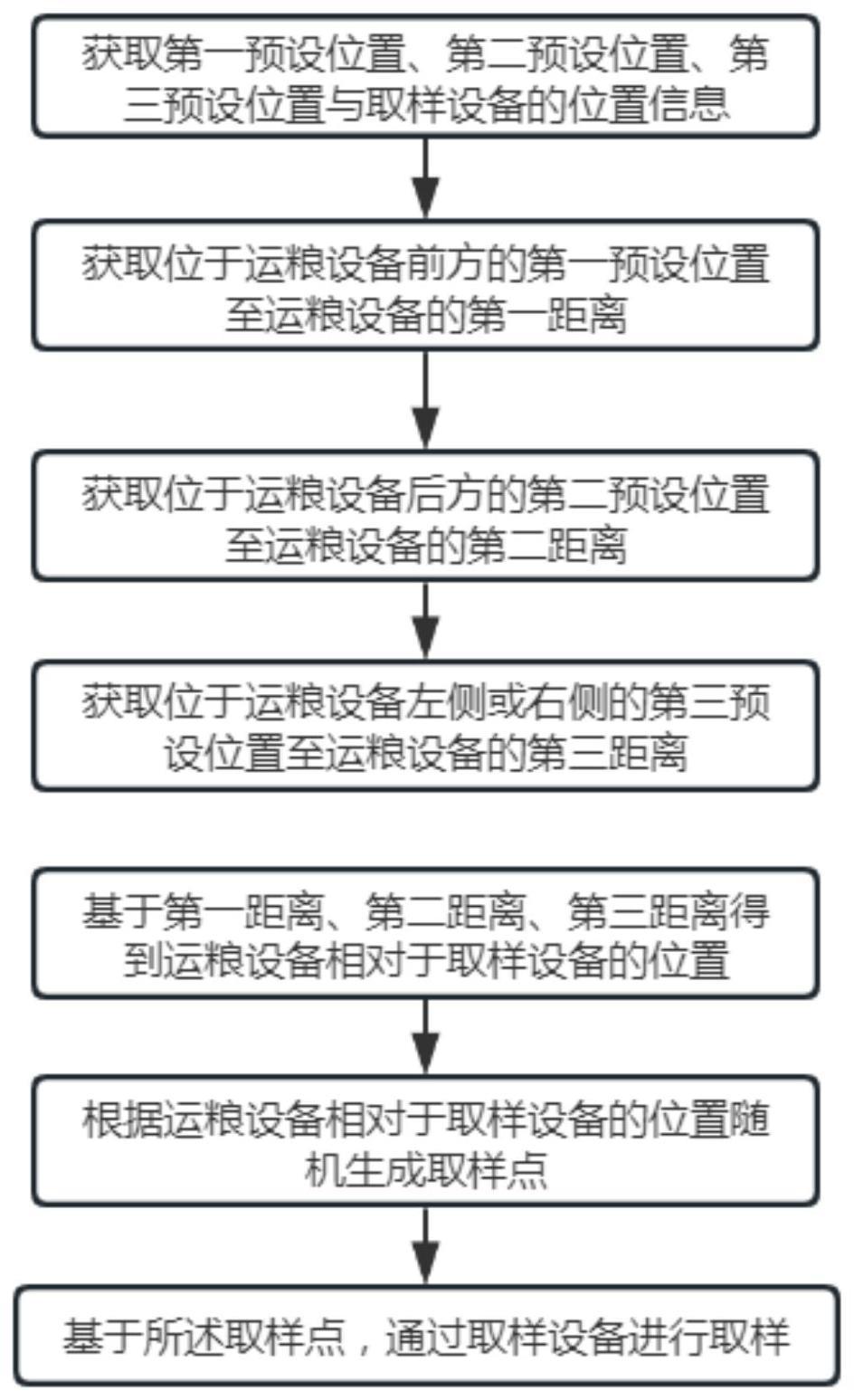
2、获取第一预设位置、第二预设位置、第三预设位置与取样设备的位置信息;
3、获取位于运粮设备前方的第一预设位置至运粮设备的第一距离;
4、获取位于运粮设备后方的第二预设位置至运粮设备的第二距离;
5、获取位于运粮设备左侧或右侧的第三预设位置至运粮设备的第三距离;
6、基于第一距离、第二距离、第三距离得到运粮设备相对于取样设备的位置;
7、根据运粮设备相对于取样设备的位置随机生成取样点,
8、基于所述取样点,通过取样设备进行取样。
9、与现有技术相比,本发明的有益效果为:通过预先设定的第一预设位置、第二预设位置、第三预设位置,仅需要获得第一距离、第二距离、第三距离就可以确定取样区域,相对于现有的扫描方式,无需设定多个扫描点,缩短了测量时间,提高了测量效率,有利于提高取样效率,从而缩短取样样运粮设备的排队时间,提高整个取样系统的工作效率。
10、优选的,基于第一预设位置、第二预设位置、第三预设位置与取样设备的位置信息,建立坐标系。
11、本优选方案的有益效果为:通过建立坐标系,为第一预设位置、第二预设位置、第三预设位置设定坐标信息,有利于通过第一距离、第二距离和第三距离得到运粮设备的坐标信息,从而有利于确定运粮设备上的取样区域。
12、优选的,所述坐标系以第三预设位置为原点。
13、本优选方案的有益效果为:将第三预设位置设为原点,有利于降低运粮设备坐标信息的计算难度。
14、优选的,在第一预设位置或第二预设位置处安装有设备识别装置;在第一预设位置和/或第二预设位置处安装有限行装置;进一步优选的,限行装置为道闸、限行杆等装置,优选的,所述限行装置上安装有测距装置。
15、本优选方案的有益效果为:通过设置限行装置,能够防止其他车辆进入取样场地,有利于提高测量效率和整体取样效率;设备识别装置用于识别运粮车的车牌号等信息,从而能够与司机信息进行人车验证,防止出现取样错误,有助于实现无人化管理,提高取样效率。
16、优选的,设定运粮设备的停放区,设定第一基准线为x轴,并设定原点;
17、设定第二基准线,所述第二基准线穿过停放区且与x轴平行;
18、优选的,所述停放区为矩形,第一预设位置与第二预设位置的连线与第二基准线重合;
19、优选的,所述第一距离为第一预设位置至运粮设备前端与第二基准线交点的距离l1;所述第二距离为第二预设位置至运粮设备后端与第二基准线交点的距离l2;所述第三距离为第三预设位置至运粮设备左端或右端的垂直距离l3。
20、本优选方案的有益效果为:通过设置第一基准线、第二基准线和停放区,使第一预设位置与第二预设位置的连线与第二基准线重合,能够降低计算难度,直接得到第一距离、第二距离和第三距离,从而得到运粮设备的坐标信息,从而有利于确定运粮设备上的取样区域。
21、优选的,设定运粮设备的停放区,设定第一基准线为x轴,并设定原点;
22、设定第二基准线,所述第二基准线穿过停放区且与x轴平行;
23、优选的,所述停放区为矩形,第一预设位置与第二预设位置的连线与第二基准线不重合;
24、优选的,第一距离l1为第一预设位置至运粮设备前端与第二基准线交点的距离,其中,l1斜为第一预设位置至运粮设备前端与第二基准线交点的直线距离,l1直为第一预设位置至第二基准线的垂直距离;
25、第二距离l2为第二预设位置至运粮设备后端与第二基准线交点的距离,其中,l2斜为第二预设位置至运粮设备后端与第二基准线交点的直线距离,l2直为第二预设位置至第二基准线的垂直距离;
26、第三距离l3为第三预设位置至运粮设备左端或右端的垂直距离。
27、本优选方案的有益效果为:通过设置第一基准线、第二基准线和停放区,第一预设位置与第二预设位置的连线与第二基准线不重合,通过计算即可得到第一距离、第二距离和第三距离,从而得到运粮设备的坐标信息,从而有利于确定运粮设备上的取样区域。
28、优选的,获取第一预设位置的坐标(x1,y1)、第二预设位置的坐标(x2,y2),
29、其中,运粮设备为运粮车,车长l长=|x1-x2|-l1-l2,
30、基于车长l长、原点和l3获取运粮车储粮区四个端点的坐标;
31、基于取样设备的坐标和运粮车储粮区四个端点的坐标得到运粮设备相对于取样设备的位置。
32、本优选方案的有益效果为:通过公式l长=|x1-x2|-l1-l2即可计算出运输车的车长,由于运粮车的型号相对固定,通过车长即可得到对应的车宽,从而确定运粮车储粮区四个端点的坐标,并得到运粮设备相对于取样设备的位置,从而有利于确定运粮设备上的取样区域。
33、优选的,获取矩形停放区四个端点的坐标,
34、基于停放区四个端点的坐标和运粮车储粮区四个端点的坐标,判断运粮设备是否为有效停放,若是,则根据运粮设备相对于取样设备的位置随机生成取样点,否则调整运粮设备的停放位置后重新获取运输车储粮区四个端点的坐标。进一步优选的,停放区四个端点的坐标所形成的区域设为第一区域,运粮车储粮区四个端点的坐标所形成的区域设为第二区域,若第二区域全部位于第一区域内,则运粮设备为有效停放。
35、本优选方案的有益效果为:通过检测运粮设备是否为有效停放,能够防止因运粮设备停放偏差导致部分取样点为非粮食区,从而有利于提高取样效率。
36、优选的,根据运粮设备相对于取样设备的位置,得到运粮设备的待取样区;
37、将所述待取样区均等划分为至少两个取样区域,在取样区域中选取目标取样区域,所述目标取样区域彼此不相邻;
38、在目标取样区域内选取取样点。
39、本优选方案的有益效果为:通过划分取样区域,在目标取样区域内选取取样点,能够提高取样点分布的均匀性和随机性,从而提高取样的准确性和效率。
40、优选的,在目标取样区域内选取取样点,包括:
41、将所述目标取样区域划分为至少两个选点区,
42、在其中一个选点区内随机生成取样点。
43、本优选方案的有益效果为:通过对目标取样区域进行二次划分,能够进一步提高取样点分布的均匀性和随机性。
44、优选的,所述待取样区为矩形,任意两个所述取样点的连线不与待取样区的边线平行。
45、本优选方案的有益效果为:任意两个所述取样点的连线不与待取样区的边线平行,能够保证在待取样区的横向和纵向方向上,只存在一个取样点,从而可以保证取样点分布的均匀性和随机性,提高样品的有效性。
46、优选的,识别所述取样点处是否为粮食区,若是,则为有效取样点,否则为无效取样点,从剩余的任意一个选点区中再次生成取样点,优选的,再次识别取样点处是否为粮食区,若是,则为有效取样点,否则,舍弃所述目标取样区域,或者在目标取样区域重复生成取样点,直至获取有效取样点或全部选点区均无有效取样点,舍弃所述目标取样区域。
47、本优选方案的有益效果为:如果取样点处为运粮设备的边框、盖在粮食上的布或塑料制品,或者是粮堆深层存在的硬物,则所述取样点为无效取样点,均会导致取样设备无法伸入粮堆及其底部,从而影响取样效率。通过在目标取样区域重复生成取样点的方法,能够保证有效取样点的数量,从而提高样品的有效性。
48、本发明还设计了一种取样系统,包括:
49、信息采集模块,配置用于
50、获取第一预设位置、第二预设位置、第三预设位置与取样设备的位置信息;
51、获取位于运粮设备前方的第一预设位置至运粮设备的第一距离;
52、获取位于运粮设备后方的第二预设位置至运粮设备的第二距离;
53、获取位于运粮设备左侧或右侧的第三预设位置至运粮设备的第三距离;
54、控制模块,配置用于
55、基于第一距离、第二距离、第三距离得到运粮设备相对于取样设备的位置;
56、根据运粮设备相对于取样设备的位置随机生成取样点,
57、基于所述取样点,控制取样设备进行取样;
58、通信模块,配置用于在信息采集模块和控制模块之间传输信息。
59、与现有技术相比,本发明的有益效果为:通过取样系统对运粮设备进行测量,有利于提高测量效率,从而提高整个取样系统的工作效率。
- 还没有人留言评论。精彩留言会获得点赞!