一种模型测点三维坐标与欧拉角的解析建模方法
本发明涉及整车逆向工程领域,具体涉及一种模型测点三维坐标与欧拉角的解析建模方法。
背景技术:
1、目前,随着逆向工程技术的不断发展,逆向工程已经成为联系新产品开发过程中的各种先进技术的纽带,被广泛应用于汽车、飞机、模具等行业的改型和创新设计中,是实现新产品快速开发的重要技术手段之一。
2、当前应用于整车逆向工程多为人工手持扫描仪进行扫描,该扫描方式很难长时间保持最佳扫描距离,扫描时受个人主观因素影响较大,自动化程度较低,此外由于车身钣金件和塑料件尺寸相差较大,对于大型钣金件和塑料件,如汽车前保险杠、车身顶棚、汽车后保险杠等平放于扫描平台时,由于重力会导致大型薄壁件出现不同于其工作姿态的形变。造成扫描工件三维点云数据与实际扫描工件尺寸产生较大误差。
3、针对汽车碰撞试验需要测量出试验前后车身形变部位三维坐标及模态试验中需要白车身几何模型的构建和加速度传感器欧拉角的测量,目前针对以上两种试验中测点三维坐标的测量主要分为三坐标测量机和量具手动测量两种测量方法,但以上两种方法均无法同时做到测量精度高、效率高、非接触式的要求,并且无法得到模态试验中白车身的传感器欧拉角,因此如何提供一种模型测点三维坐标与欧拉角的解析建模方法就显得尤为重要。
技术实现思路
1、为克服背景技术中存在的不足,本发明提供了一种模型测点三维坐标与欧拉角的解析建模方法,本发明通过机械手沿滑台导轨围绕待扫描工件进行运动,配合机械手的六自由度运动,实现对待扫描工件全方位无死角的自动化扫描,解决了操作员长时间手持扫描仪产生的疲劳,同时能稳定保持扫描仪与待扫描工件直接最佳扫描距离等,解决了现有技术中无法同时做到测量精度高、效率高、非接触式的要求等。
2、为实现如上所述的发明目的,本发明采用如下所述的技术方案:
3、一种模型测点三维坐标与欧拉角的解析建模方法,所述解析建模方法具体包括如下步骤:
4、第一步、利用扫描装置对白车身进行测量,具体测量步骤如下:
5、a、将待扫描白车身放置在扫描装置中横梁之下;
6、b、确定白车身悬挂点位置,调整扫描装置中两根横梁与吊机的位置,使吊机位于白车身的悬挂点之上;
7、c、启动吊机,将吊机中钢丝吊绳下降至白车身之上,将钢丝吊绳与白车身固定连接;
8、d、启动吊机,将白车身提升至预定位置,观察白车身空间位置是否符合设计要求,若符合设计要求,进行下一步,若不符合设计要求,通过升降吊机对白车身进行调整;
9、e、调整调整扫描装置中3d相机的位置,观察3d相机位置是否符合设计要求,若符合设计要求,进行下一步,若不符合设计要求,对3d相机的空间位置及拍摄角度进行调整,直至符合设计要求;
10、f、启动3d相机,首先对3d相机进行标定,采集白车身的外表面轮廓,然后通过调整扫描装置中计算机规划出扫描仪首次扫描路径;
11、g、启动扫描仪,通过扫描仪上的距离信号传感器判断扫描仪扫描距离是否符合设计要求,若符合设计要求,进行下一步,若不符合设计要求,调整机械手使其位于预设的扫描位置;
12、h、启动机械手,使其沿计算机规划出的首次扫描路径进行运动扫描;
13、i、机械手沿首次扫描路径完成扫描后,观察模型完整度是否满足设计要求,若满足设计要求,进行下一步,若不满足设计要求,通过计算机再次规划扫描路径,进行再次扫描直至模型满足要求;
14、j、在扫描采集的三维点云数据中选取一点为中心坐标(0,0,0)和x、y、z轴的正方向,其他点三坐标也随即确定,选取白车身实验中所需要的几何模型构成点的三坐标便得到实验中白车身的几何模型,同时将几何模型的构成点周围的三角面片拟合成实验所用的三向加速度传感器大小的平面,这样通过计算得出拟合平面与三坐标轴的夹角,即为实验中所需要的欧拉角;
15、第二步、对模型测点三维坐标与欧拉角进行解析建模,具体包括如下步骤:
16、a、将几何模型导入到计算机中的分析软件中,解析模型;
17、b、规定模型原点和x、y、z正方向,其他点三坐标也随即确定;
18、c、确定白车身模态试验测点位置,在模型中选取试验所需测点;
19、d、将所选取测点位置周围的面片拟合成三向加速度传感器大小的平面,并按照白车身模态试验中所布置传感器方向来规定平面x、y、z方向;
20、e、自动计算模型的全局坐标系和平面的局部坐标系之间夹角,即为模态试验中所需要的欧拉角;
21、f、根据测点坐标和测点位置欧拉角自动生成模态试验模型;
22、g、将所建立的模态试验模型导入到计算机中模态分析软件中,直接进行模态试验。
23、所述的模型测点三维坐标与欧拉角的解析建模方法,所述第一步中对白车身的外表面轮廓进行采集时,具体包含如下步骤:
24、a、启动3d相机,对白车身进行全方位拍摄;
25、b、对所采集的3d图像进行拼接,获取白车身的外表面轮廓;
26、c、计算机根据所采集的白车身的外表面轮廓规划出首次扫描路径;
27、所述的模型测点三维坐标与欧拉角的解析建模方法,所述第一步中利用扫描仪对白车身进行扫描时,具体包含如下步骤:
28、a、启动机械手和扫描仪,沿所规划的扫描路径进行第一次扫描;
29、b、扫描完成后,通过计算机判断模型外是否有标记点,若无标记点,模型完整,结束扫描,否则采集模型外标记点,计算机根据所采集模型外标记点再次规划扫描路径,直至模型完整。
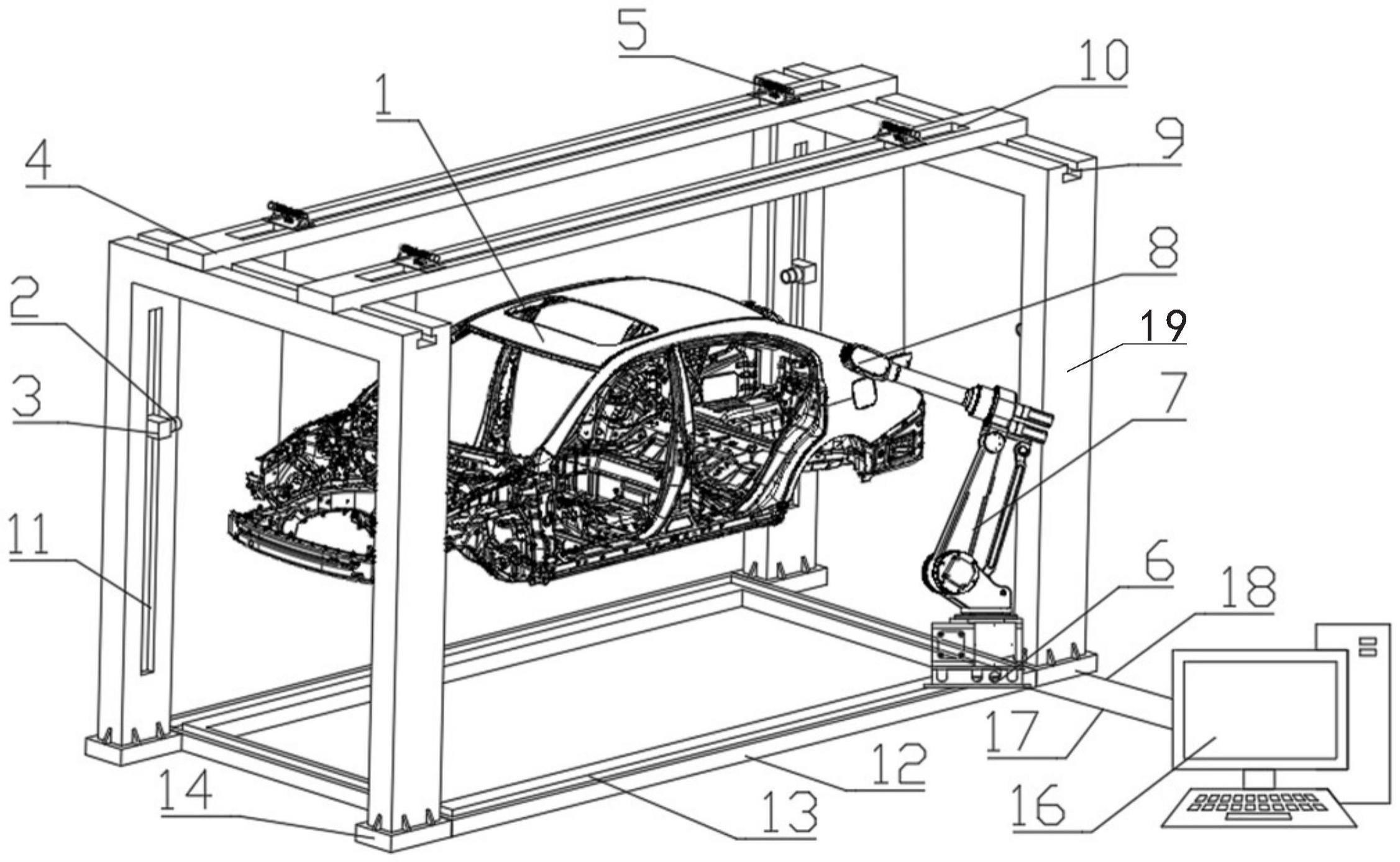
30、所述的模型测点三维坐标与欧拉角的解析建模方法,所述第一步中扫描装置包括3d相机、横梁、吊机、机械手、扫描仪、滑台、计算机和桁架,在所述桁架的上面设有两个前后滑动的横梁,在每根横梁上分别设有至少两个左右滑动的吊机,每个吊机的钢丝吊绳的末端分别连接待扫描工件,在桁架的四根立柱的侧面分别设有上下滑动的3d相机,3d相机通过3d相机数据传输线连接计算机,在桁架的底部设有口字型滑台,在滑台的上面设有滑台导轨,所述滑台导轨连接机械手底座,在所述机械手底座上设有机械手,所述机械手连接扫描仪,扫描仪通过扫描仪数据传输线连接计算机,所述机械手连接机械手控制器。
31、所述的模型测点三维坐标与欧拉角的解析建模方法,所述桁架的上面间隔设有两条纵向导轨,两条纵向导轨分别连接横梁的两端。
32、所述的模型测点三维坐标与欧拉角的解析建模方法,所述横梁上设有横向导轨,所述横向导轨上分别设有吊机。
33、所述的模型测点三维坐标与欧拉角的解析建模方法,所述桁架的四根立柱的侧面分别设有竖向导轨,在每根竖向导轨上分别设有3d相机底座,在每个3d相机底座分别设有3d相机。
34、所述的模型测点三维坐标与欧拉角的解析建模方法,所述机械手包括旋转臂、机械手大臂、机械手小臂、机械手腕和连杆,所述旋转臂设置在机械手底座上,旋转臂分别连接机械手大臂与连杆的下端头,机械手大臂与连杆的上端头分别连接机械手小臂的左端头,机械手小臂的右端头连接机械手腕,所述机械手腕连接扫描仪。
35、所述的模型测点三维坐标与欧拉角的解析建模方法,所述吊机包括电机、电机支架、钢丝吊绳、卷筒、吊台、导线轮、导线轮支架和吊台滑块,所述吊台滑块连接设置在横梁上的横向导轨,在吊台滑块的上面设置吊台,在吊台的上面间隔设置两个电机支架,在两电机支架之间设置卷筒,所述卷筒的一端连接电机,在卷筒的外缘面上缠绕有钢丝吊绳,在卷筒下方吊台的上面设有导线轮支架,在导线轮支架上设有两个导线轮,钢丝吊绳的末端经导线轮实现上下升降。
36、所述的模型测点三维坐标与欧拉角的解析建模方法,所述桁架四根立柱的下端头分别设有桁架底座。
37、采用如上所述的技术方案,本发明具有如下所述的优越性:
38、本发明通过将扫描工件通过吊机悬挂于横梁之下,解决了由于待扫描工件受重力导致大型薄壁件出现不同于其工作姿态的形变问题,扫描仪安装在机械手末端,通过机械手带动扫描仪来实现对工件的全方位扫描,根据扫描仪的距离信号来控制扫描仪与待扫描工件之间的扫描距离,解决了操作员长时间手持扫描仪产生的疲劳,同时能稳定保持扫描仪与待扫描工件直接最佳扫描距离,本发明能够满足整车逆向工程中不同尺寸钣金件的自动化扫描,解决了大型钣金件平放于传统扫描平台,由于受重力产生不同于其工作姿态的形变,同时可以快速获得整车碰撞试验和白车身模态试验中测点的三维坐标及欧拉角,提高扫描效率,缩短逆向工程周期等,适合大范围的推广和应用。
- 还没有人留言评论。精彩留言会获得点赞!