星机双基地时间误差同步方法及频域成像方法
本发明涉及星机双基地系统成像方法领域,具体是一种星机双基地时间误差同步方法及频域成像方法。
背景技术:
1、相对于传统单基地雷达,星机双基地雷达系统有着诸多优势,例如发射端以卫星作为载体平台,接收端处于无源状态(只接收信号),可极大提高系统隐蔽性;卫星与飞机可以工作在双向滑动聚束式、双聚束式、双宽波束式等协同模式下,可以根据需要获得目标各个方位散射信息,以及借助卫星波束广泛的覆盖实现对观测场景的大面积成像。但由于收发雷达并不共用同一频率振荡源,导致随着卫星的长时间运行,时间误差对成像的影响不可忽略;同时星机双基地sar在斜距历程上表现为双根号形式,如何获取高精度二维频谱也是成像关键。
2、在双基地中,由于接收端与发射端不共用一个频率振荡源,在成像处理前就需要对时间进行同步。如果不对时间误差加以校正会造成成像质量下降,例如主瓣增大引起的空间分辨率下降、成像位置偏离实际位置等。目前的方法有利用基于幅度的方法对直达波进行多普勒的小数部分与整数部分分别进行估计,再对直达波峰值进行多项式拟合,但整个步骤存在多种误差来源且计算量大。
3、星机双基地sar工作在双聚束模式下几何模型如图1所示,其中vs,va分别表示卫星与无人机的飞行速度,rs0,rp0分别表示在零时刻卫星与无人机到场景中心的斜距。卫星发射信号,飞机上安装有两幅接收天线,一幅用来接收卫星发射的直达波信号,另一幅用来接收场景目标p反射的回波。
4、双聚束式可以提供更长的合成孔径时间从而获得更高的方位分辨率,但同时也会导致方位谱的展宽。卫星通常距离地面几百公里,如果设置满足方位带宽的脉冲重复频率(prf)可能导致距离向产生模糊,而且要求系统处理的数据量也会增加,不利于成像系统的实时性。因此,在星机双聚束模式下通常采用条带模式下近似的prf,但这种prf通常会导致方位频谱的模糊。解决此问题,一般采用两步处理法与空域滤波法。其中空域滤波法是通过增加卫星数量来提高系统自由度,但每增加一颗卫星,雷达系统成像成本大大提高,系统结构也更加复杂,本发明通过两步处理法使用一颗卫星获得无模糊方位频谱。
5、此外,双基地雷达的斜距历程为双根号形式,其二维频谱的求解相对于单基地也更加困难,也不利于后续补偿算法设计。文献“星机双基地sar二维频谱解析表达式求解方法研究”中,刘喆等人提出的air-phase(ap)算法将收发历程看作为一个整体,通过选取合适的泰勒展开点来获取二维频谱解析式,在卫星与飞机速度相差较大的情况下目标可以良好地聚焦,但该算法所选取泰勒展开点时忽略飞机斜距历程贡献,当卫星运行在中轨时此泰勒展开点只考虑卫星多普勒变化率对系统驻相点的贡献,并不能表征系统驻相点全部特征。
技术实现思路
1、本发明提供了一种星机双基地时间误差同步方法及频域成像方法,以解决现有技术星机双基地系统进行成像数据处理时时间误差估计存在的计算量大、精度低、成本高的问题,以及不能表征系统驻相点全部特征的问题。
2、为了达到上述目的,本发明所采用的技术方案为:
3、星机双基地时间误差同步方法,包括以下步骤:
4、步骤1、令星机双基地系统中的飞机直接接收卫星发射的直达波信号;
5、步骤2、通过距离向脉压函数对所述直达波信号进行距离压缩处理,并提取距离压缩处理结果的峰值信号组成一个一维向量信号;
6、步骤3、对步骤2得到的一维向量信号进行分数阶傅里叶变换,并确定分数阶傅里叶变换后信号的最大值位置坐标(u,α),根据(u,α)计算一维向量信号相位的线性部分;
7、步骤4、获取所述直达波信号的多普勒质心fdc,将步骤3得到的线性部分减去多普勒质心fdc,得到时间误差变化率δ;
8、步骤5、利用步骤4得到的时间误差变化率δ构造时间误差补偿函数,基于时间误差补偿函数对星机双基地系统中飞机接收的目标回波信号进行补偿,得到无时间误差的目标回波信号。
9、进一步的步骤3中,通过搜索法确定分数阶傅里叶变换后信号的最大值位置坐标。
10、进一步的步骤4中,基于所述直达波信号斜距历程计算得到直达波信号的多普勒质心fdc。
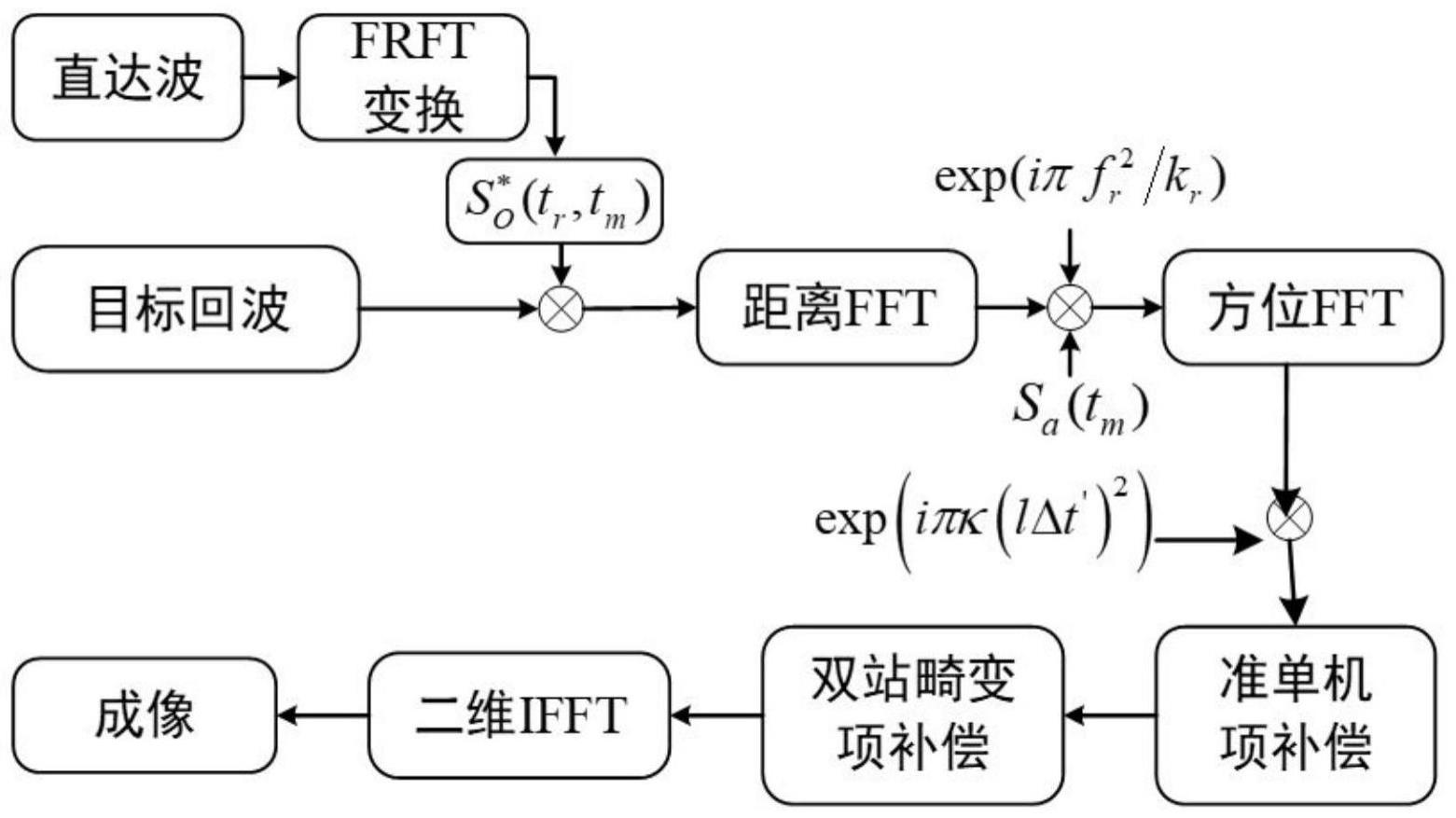
11、星机双基地频域成像方法,包括以下步骤:
12、步骤s1、按权利要求1-3中任意一项所述星机双基地sar时间误差同步方法,得到无时间误差的目标回波信号;
13、步骤s2、对步骤s1得到的目标回波信号进行deramp操作,得到方位无模糊的时域回波信号;
14、步骤s3、对步骤s2得到的时域无模糊回波信号进行距离向匹配滤波,得到快时间频域-慢时间时域目标回波信号,再对慢时间时域进行傅里叶变换得到目标回波信号二维频谱积分表达式;
15、步骤s4、提取步骤s3二维频谱中积分中的相位进行二阶泰勒展开并进行整理,得到近似相位的表达式:
16、
17、其中,tb表示系统驻相点tk邻域内的一个时间点;表示tb点处的相位,分别表示的一阶导数和二阶导数;
18、步骤s5、综合考虑卫星与飞机多普勒变化率的贡献,选取tb满足d(2π(fc+fr)/cr(tb)+2πfatb)/dtb=0,其中r(tb)=rs(tb)+rp(tb),r(tb)表示在tb时刻无人机到目标的瞬时斜距,rp(tb)表示在tb时刻无人机到目标的瞬时斜距,rs(tb)表示在tb时刻卫星到目标的瞬时斜距,并对r(tb)在tb=0处进行泰勒展开至4次项,再应用级数反演法求取改进的展开点t'b,改进后的展开点t'b表达式为:
19、
20、其中,dr(t'b)=r′s(t'b)+r'a(t'b)+cfa/(fc+fr),tm表示慢时间,rs(tm)表示卫星与目标点瞬时斜距,ra(tm)表示飞机与目标点瞬时斜距;fa,fr与fc分别表示方位、距离频率与发射信号中心频率;dr(n)(t'b)为dr(t'b)的n阶导数,rs'(t'b)为rs(t'b)的导数,r'a(t'b)为ra(t'b)的导数;c为光速。
21、步骤s6、将步骤s5得到的改进后的展开点t'b替换步骤s4得到的近似相位表达式中的tb,最后得到目标回波信号的二维频谱解析式;
22、步骤s7、利用步骤s6得到的目标回波信号的二维频谱解析式,对目标回波信号的二维频谱进行双站畸变项补偿与准单基项补偿;
23、步骤s8、对步骤s7补偿后的目标回波信号的二维频谱再进行二维逆傅里叶变换,实现聚焦成像。
24、进一步的步骤s2中,首先根据星机双基地系统几何构型,确定deramp参考函数表达式sref(tm);然后基于deramp参考函数表达式sref(tm),对步骤s1得到的目标回波信号进行deramp操作,实现方位解模糊。
25、本发明中,针对时间同步提出一种基于分数阶傅里叶变换(frft)来估计时间误差的新方法,简化传统时间误差估计步骤;在进行时间误差补偿后,结合方位dermap技术消除方位谱模糊,最后使用改进后的air-phase方法求解二维频谱实现目标成像。本发明方法均借助fft实现并不需要插值处理,保证了成像效率。
26、本发明中,利用分数阶傅里叶变换(frft)来获取直达波质心进而估算时间误差的频率同步方法,在算法设计上可以平衡精度与运算量。同时对于成像方法,对泰勒展开点进行改进,使其在无人机多普勒贡献不能被忽略的情况下也能获得良好的成像结果。
27、因此,与现有技术相比本发明优点为:
28、(1)本发明提出一种星机双基地时间误差估计新方法,利用frft进行时间误差估计可以有效克服交叉项及回波中噪声的干扰,可以通过设置搜索步长在误差估计精度与计算量进行平衡;相较于传统时间误差估计方法,本发明简化了时间误差的估计步骤,减少了估计过程中误差来源提高了时间误差估计精度。
29、(2)本发明针对星机双基地双聚束构型提出完整的成像步骤,并对原有ap算法进行改进,使其具有更高精度的系统驻相点,能够在卫星运行于中高轨的情况下依然能够进行良好地聚焦成像。
- 还没有人留言评论。精彩留言会获得点赞!